【目标检测系列:三】Faster RCNN simple-faster-rcnn-pytorch 实现详解
Faster RCNN 论文详解 请看 上篇 :【目标检测系列:二】Faster RCNN 论文阅读+解析+pytorch实现
本文主要重点不在于代码调试 ,而是 解析 每个函数是什么意思 ,来达到对Faster RCNN 理解的效果~~~
Pytorch
https://github.com/jwyang/faster-rcnn.pytorch
https://github.com/ruotianluo/pytorch-faster-rcnn
https://github.com/chenyuntc/simple-faster-rcnn-pytorch 跑了这个 ☺
1. Prepare data
Pascal VOC2007
Download the training, validation, test data and VOCdevkit
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtrainval_06-Nov-2007.tar
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCtest_06-Nov-2007.tar
wget http://host.robots.ox.ac.uk/pascal/VOC/voc2007/VOCdevkit_08-Jun-2007.tar
Extract all of these tars into one directory named VOCdevkit
tar xvf VOCtrainval_06-Nov-2007.tar
tar xvf VOCtest_06-Nov-2007.tar
tar xvf VOCdevkit_08-Jun-2007.tar
It should have this basic structure
$VOCdevkit/ # development kit
$VOCdevkit/VOCcode/ # VOC utility code
$VOCdevkit/VOC2007 # image sets, annotations, etc.
# ... and several other directories ...
modify voc_data_dir cfg item in utils/config.py, or pass it to program using argument like --voc-data-dir=/path/to/VOCdevkit/VOC2007/ .
2. Prepare caffe-pretrained vgg16
If you want to use caffe-pretrain model as initial weight, you can run below to get vgg16 weights converted from caffe, which is the same as the origin paper use.
python misc/convert_caffe_pretrain.py
NOTE, caffe pretrained model has shown slight better performance.
NOTE: caffe model require images in BGR 0-255, while torchvision model requires images in RGB and 0-1. See data/dataset.pyfor more detail.
3. begin training
mkdir checkpoints/ # folder for snapshots
python train.py train --env='fasterrcnn-caffe' --plot-every=100 --caffe-pretrain
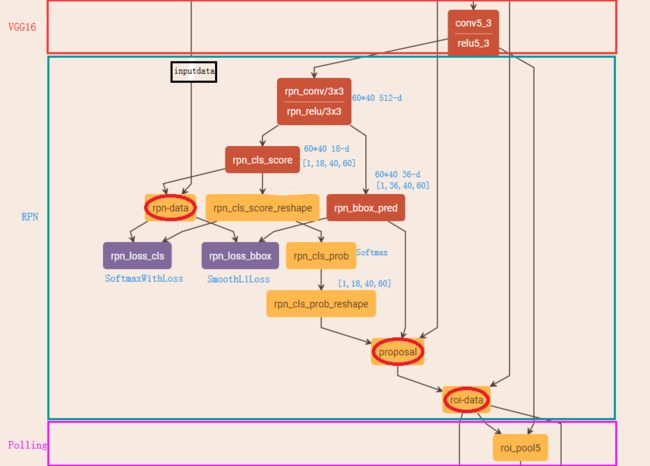
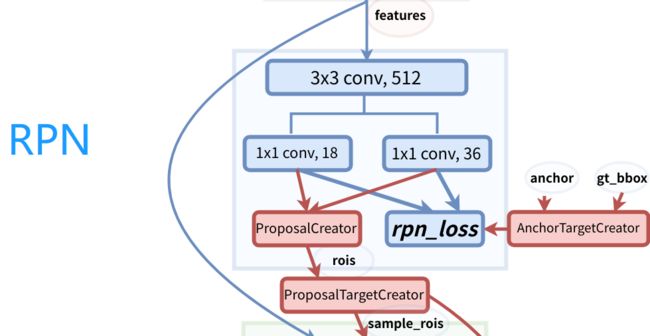
RPN
conv
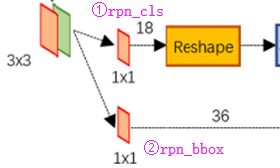
- h = conv 3×3 / ReLU (x)
- rpn_locs = conv 1×1(h)
(N,4A,H,W) - rpn_scores = conv 1×1(h)
(N,2A,H,W)
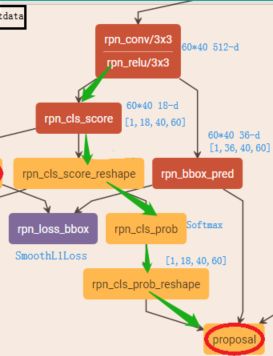
rpn_scores → reshape → rpn_softmax_scores → reshape → rpn_fg_scores
(绿色的线)
Anchor
- anchor_base = generate_anchor_base(anchor_scales,ratios)
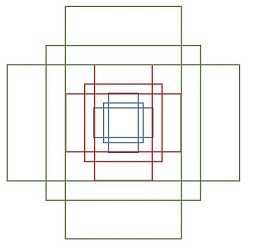
anchor = _enumerate_shifted_anchor()
Enumerate all shifted anchors
n_anchor 个数
import numpy as np
import numpy as xp
import six # six是用来兼容python 2 和 3的
from six import __init__
def generate_anchor_base(base_size=16, ratios=[0.5, 1, 2],
anchor_scales=[8, 16, 32]):
"""Generate anchor base windows by enumerating aspect ratio and scales.
Generate anchors that are scaled and modified to the given aspect ratios.
Area of a scaled anchor is preserved when modifying to the given aspect
ratio.
:obj:`R = len(ratios) * len(anchor_scales)` anchors are generated by this
function.
The :obj:`i * len(anchor_scales) + j` th anchor corresponds to an anchor
generated by :obj:`ratios[i]` and :obj:`anchor_scales[j]`.
For example, if the scale is :math:`8` and the ratio is :math:`0.25`,
the width and the height of the base window will be stretched by :math:`8`.
For modifying the anchor to the given aspect ratio,
the height is halved and the width is doubled.
Args:
base_size (number): The width and the height of the reference window.
ratios (list of floats): This is ratios of width to height of
the anchors.
anchor_scales (list of numbers): This is areas of anchors.
Those areas will be the product of the square of an element in
:obj:`anchor_scales` and the original area of the reference
window.
Returns:
~numpy.ndarray:
An array of shape :math:`(R, 4)`.
Each element is a set of coordinates of a bounding box.
The second axis corresponds to
:math:`(y_{min}, x_{min}, y_{max}, x_{max})` of a bounding box.
"""
py = base_size / 2.
px = base_size / 2.
# ratios=[0.5, 1, 2]
# anchor_scales=[8, 16, 32]
anchor_base = np.zeros((len(ratios) * len(anchor_scales), 4),
dtype=np.float32)
for i in six.moves.range(len(ratios)):
for j in six.moves.range(len(anchor_scales)):
h = base_size * anchor_scales[j] * np.sqrt(ratios[i])
w = base_size * anchor_scales[j] * np.sqrt(1. / ratios[i])
index = i * len(anchor_scales) + j
anchor_base[index, 0] = py - h / 2.
anchor_base[index, 1] = px - w / 2.
anchor_base[index, 2] = py + h / 2.
anchor_base[index, 3] = px + w / 2.
return anchor_base
Result:
index=0
[[-37.254833 -82.50967 53.254833 98.50967 ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=1
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=2
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=3
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=4
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[-120. -120. 136. 136. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=5
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[-120. -120. 136. 136. ]
[-248. -248. 264. 264. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=6
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[-120. -120. 136. 136. ]
[-248. -248. 264. 264. ]
[ -82.50967 -37.254833 98.50967 53.254833]
[ 0. 0. 0. 0. ]
[ 0. 0. 0. 0. ]]
index=7
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[-120. -120. 136. 136. ]
[-248. -248. 264. 264. ]
[ -82.50967 -37.254833 98.50967 53.254833]
[-173.01933 -82.50967 189.01933 98.50967 ]
[ 0. 0. 0. 0. ]]
index=8
[[ -37.254833 -82.50967 53.254833 98.50967 ]
[ -82.50967 -173.01933 98.50967 189.01933 ]
[-173.01933 -354.03867 189.01933 370.03867 ]
[ -56. -56. 72. 72. ]
[-120. -120. 136. 136. ]
[-248. -248. 264. 264. ]
[ -82.50967 -37.254833 98.50967 53.254833]
[-173.01933 -82.50967 189.01933 98.50967 ]
[-354.03867 -173.01933 370.03867 189.01933 ]]
bbox_tools
- R R R
number of bounding boxes.
bbox2loc
encoder :给一个 bounding box ,计算边界框的偏移量和比例
-
bounding box
center ( y , x ) = p y , p x (y, x) = p_y, p_x (y,x)=py,px
size p h , p w p_h, p_w ph,pw -
the target bounding box
center g y , g x g_y, g_x gy,gx
size g h , g w g_h, g_w gh,gw -
the offsets and scales
t y , t x , t h , t w t_y, t_x, t_h, t_w ty,tx,th,tw can be computed by the following formulas.t y = ( g y − p y ) p h t_y = \frac{(g_y - p_y)} {p_h} ty=ph(gy−py)
t x = ( g x − p x ) p w t_x = \frac{(g_x - p_x)} {p_w} tx=pw(gx−px)
t h = log ( g h p h ) t_h = \log(\frac{g_h} {p_h}) th=log(phgh)
t w = log ( g w p w ) t_w = \log(\frac{g_w} {p_w}) tw=log(pwgw) -
输出的type 和 输入相同。
encoder 公式在R-CNN 中也用到了。
loc2bbox
decoder :根据bbox2loc求出来的边界框的偏移量和比例,计算 bounding boxes 坐标
-
Given bounding box offsets and scales computed by
bbox2loc, -
this function Decode bounding boxes from bounding box offsets and scales.
-
Given scales and offsets $ t_y, t_x, t_h, t_w$
-
a bounding box whose center is ( y , x ) = p y , p x (y, x) = p_y, p_x (y,x)=py,px and size p h , p w p_h, p_w ph,pw,
-
the decoded bounding box’s center : g ^ y \hat{g}_y g^y, g ^ x \hat{g}_x g^x and size g ^ h \hat{g}_h g^h, g ^ w \hat{g}_w g^w are calculated by the following formulas.
g ^ y = p h t y + p y \hat{g}_y = p_h t_y + p_y g^y=phty+py
g ^ x = p w t x + p x \hat{g}_x = p_w t_x + p_x g^x=pwtx+px
g ^ h = p h exp ( t h ) \hat{g}_h = p_h \exp(t_h) g^h=phexp(th)
g ^ w = p w exp ( t w ) \hat{g}_w = p_w \exp(t_w) g^w=pwexp(tw) -
bbox_iou
计算边界框之间 iou
-
Args:
bbox_a (array) (R, 4)bbox_b (array): An array similar to bbox_a, (K, 4)
-
Returns:
array ( R , K ) (R, K) (R,K)
generate_anchor_base
Generate anchor base windows by enumerating aspect ratio and scales
- base_size=16, ratios=[0.5, 1, 2], anchor_scales=[8, 16, 32]
Proposal
- proposal_layer = ProposalCreator()
roi = proposal_layer( rpn_locs, rpn_fg_scores ,anchor)
ProposalCreator
-
This class takes parameters to control number of bounding boxes to pass to NMS and keep after NMS.
该类接受参数来控制要传递给NMS并在NMS之后保留的包围框数量。 -
Returns
An array of coordinates of proposal boxes
-
process
- Convert anchors into proposal via bbox transformations.
roi = loc2bbox(anchor, loc)
-
Clip predicted boxes to image.
-
Remove predicted boxes with either height or width < threshold.
-
Sort all (proposal, score) pairs by score from highest to lowest.
Take top pre_nms_topN (e.g. 6000).
-
Apply nms (e.g. threshold = 0.7).
Take after_nms_topN (e.g. 300). -
keep = non_maximum_suppression
ROI Pooling
VGG16RoIHead
head = VGG16RoIHead(
n_class=n_fg_class + 1,
roi_size=7,
spatial_scale=(1. / self.feat_stride),
classifier=classifier
)
-
pool = self.roi(x, indices_and_rois)
roi = RoIPooling2D(self.roi_size, self.roi_size, self.spatial_scale)roi_size=7
FC
VGG16RoIHead
- fc7 = self.classifier(pool)
Two layer Linear ported from vgg16
classifier = decom_vgg16()
-
oi_cls_locs = self.cls_loc(fc7)
cls_loc = nn.Linear(4096, n_class * 4) -
roi_scores = self.score(fc7)
score = nn.Linear(4096, n_class)