
产品说明
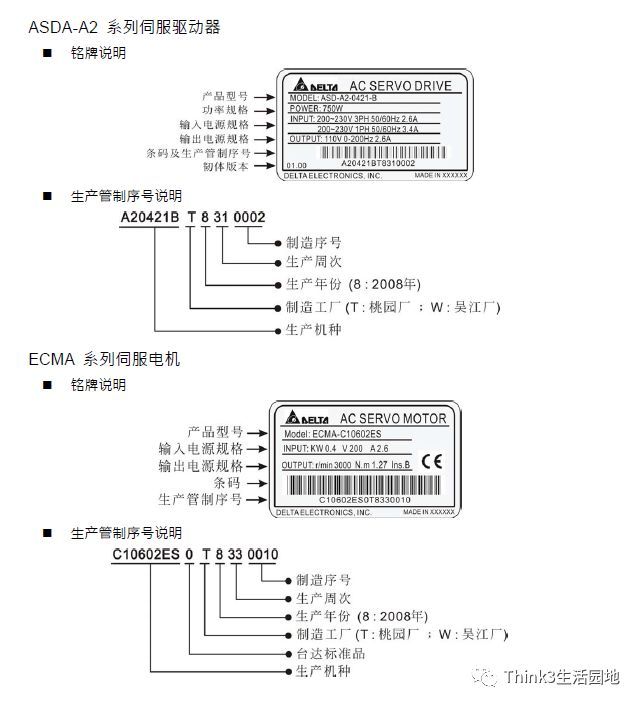
上电测试
台达伺服驱动上电会显示AL0011的(位置检出器异常警告)
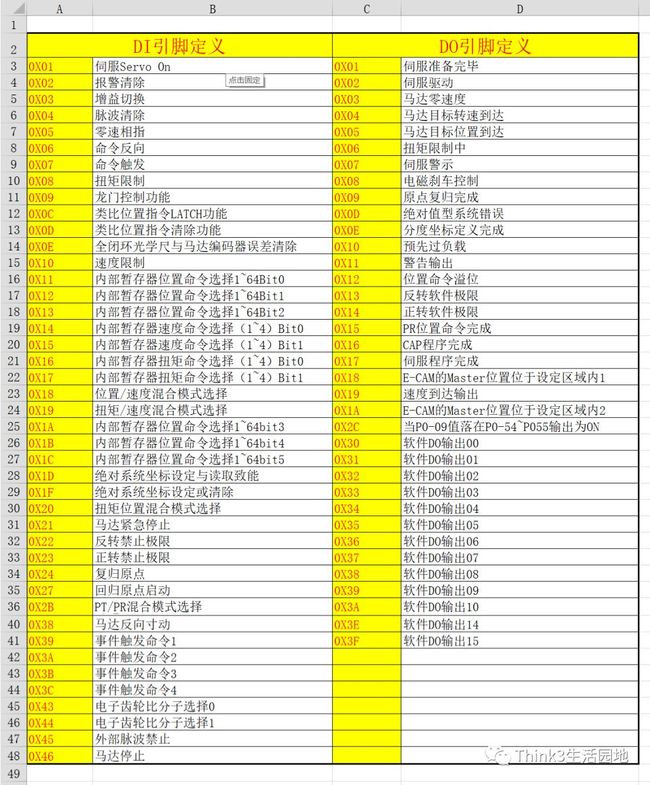
这是因为DI引脚输入默认常开,并定义为紧急停止,所以就报这个警,所以需将这个参数定义为无效或者常闭,具体默认引脚定义如下图所示:

现在就能点动测试了
最后安装到设备上即可
所以常用到的参数如下:

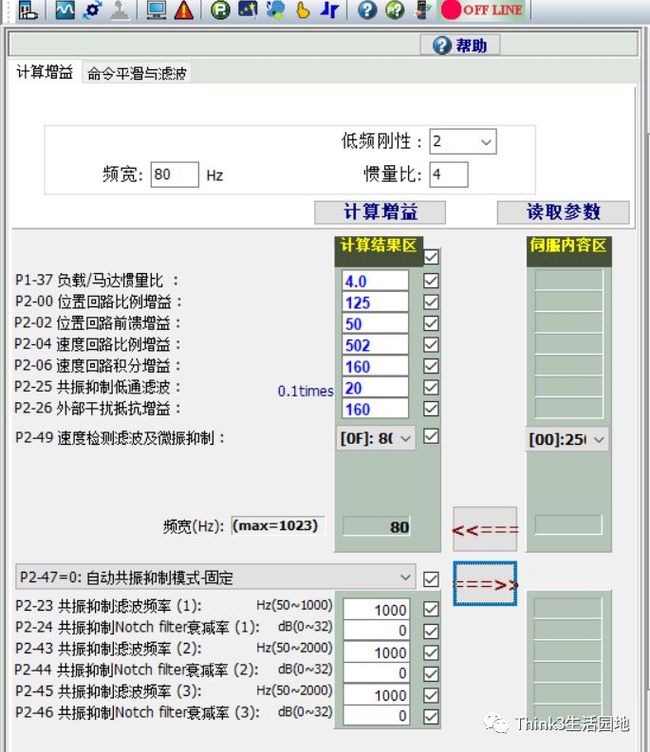
增 益 调 整
![]()
在安装设备之后机构可能存在抖动则需要对伺服的PID参数进行一个调整:
增益调整分自动、半自动以及手动调整。
默认参数为手动调整 0
★半自动调整:
将P2-32设定为2(自动模式,持续调整)
持续估测系统惯量,每隔30分钟会自动存储所估测的负载惯量比到P1-37,并参考P2-31的刚性以及频宽。
P2-31 自动调整模式刚性设定(出厂值为 80)
1~50 低刚性、低响应
51~250 中刚性、中响应
251~850 高刚性,高响应。
自动以及半自动调整模式刚性设定,值越大刚性越快。

注:
1. P2-33 bit 0:1 表示半自动模式的惯量估测已经完成,可以读取P1-37 得知。
2. 若将其清除为0,则重新惯量估测。
负载惯量估测的限制
到达 2000r/min 的加减速时间需在1 秒以下。
回转速需在 200 r/min 以上。
负载惯量需为电机惯量的 100 倍以下。
外力或惯性比变化不得太剧烈。
自动增益模式在每 30 分钟会将惯量值自动写入至P1-37,半自动增益调整模式会在运转一
段时间后,等系统惯量稳定后负载惯量停止估测,并自动储存惯量值至P1-37。
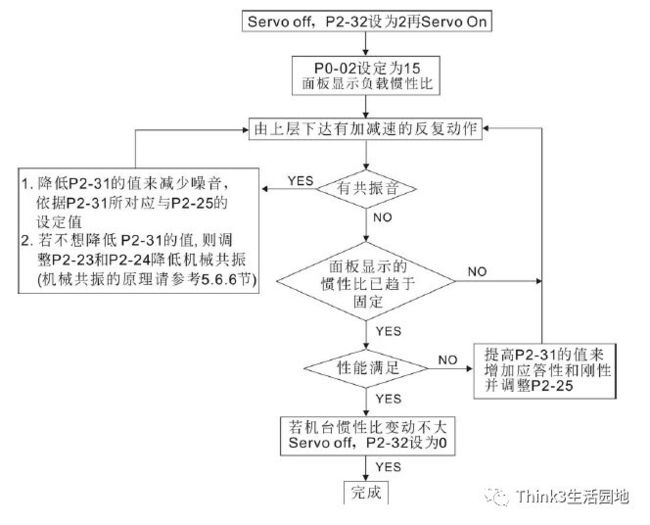

注:
1. 参数P2-44 和P2-46 是共振深度设定值,如果该值已经设至最大(32dB),仍旧无法
降低共振时,请降低速度带宽。在设定P2-47 之后,使用者可检查P2-44 和P2-46,
当P2-44 的值为非0 时,表示系统有一共振频,此时使用者可读取P2-43,即为此
共振点的Hz,当系统有另一共振点时,其信息会如同P2-43 与P2-44 显示于P2-45
与P2-46。
2. 当共振现象持续存在,并重复设定P2-47=1 达三次以上,请进入手动调整共振深度
设定。
★ 手动调整增益关于位置或速度响应频率的选择必须由机台的刚性及应用的场合来决定,一般而言,高频
度定位的机台或要求精密加工的机台需要设定较高的响应频率,但设定较高的响应频率容
易引发机台的共振,因此有高响应需求的场合需要刚性较高的机台以避免机械共振。在未
知机台的容许响应频率时,可逐步加大增益设定以提高响应频率直到共振音产生时,再调
低增益设定值。其相关增益调整原则如下说明:
1: 位置控制增益(KPP,参数P2-00)
本参数决定位置回路的应答性,KPP 值设定越大位置回路响应频率越高,对于位置命
令的追随性越佳,位置误差量越小,定位整定时间越短,但是过大的设定会造成机台
产生抖动或定位会有过冲(Overshoot)的现象。位置回路响应频率的计算如下:

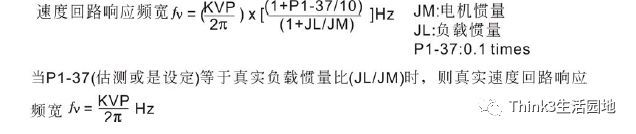
2:速度控制增益(KVP,参数P2-04)
本参数决定速度控制回路的应答性,KVP 设越大速度回路响应频率越高,对于速度命
令的追随性越佳,但是过大的设定容易引发机械共振。速度回路的响应频率必须比位
置回路的响应频率高 4~6 倍,当位置响应频率比速度响应频率高时,机台会产生抖动
或定位会有过冲(Overshoot)的现象。速度回路响应频率的计算如下:
速度回路响应频率的计算如下:
3:速度积分补偿(KVI,参数P2-06)
KVI 越大对固定偏差消除能力越佳,过大的设定容易引发机台的抖动,建议设定值如
下:
![]()
4:共振抑制低通滤波器(NLP,参数P2-25)
负载惯性比越大,速度回路的响应频率会下降,必须加大KVP 以维持速度的响应频率,
在加大KVP 的过程,可能产生机械共振音,请尝试利用本参数将噪音消除。越大的
设定对高频噪音的改善越明显,但是过大的设定会导致速度回路不稳定及过冲的现象,
其设定建议值如下:

5:外部干扰抵抗增益(DST,参数P2-26)
本参数用来增加对外力的抵抗能力,并降低加减速的过冲现象,出厂值为 0。在手动
模式不建议调整,除非是要进行自动增益结果的微调。
6:位置前馈增益(PFG,参数P2-02)
可降低位置误差量并缩短定位的整定时间,但过大的设定容易造成定位过冲的现象;
若电子齿轮比设定大于10,亦容易产生噪音。
总结:
先将位置增益P2-00设置到停止定位停止时不会发生抖动,然后再调整P2-04速度控制增益,提升速度跟随性,让其反应敏捷,准确定位。
对于P2-06积分补偿可消除固定时的偏差,P2-02位置前馈增益,让其具有前瞻性,降低位置误差并缩短定位整定时间。