本文参考整理了Coursera上由NTU的林轩田讲授的《机器学习技法》课程的第三章的内容,主要介绍了Kernel SVM和核函数Kernel Function的基本概念及理论,主要介绍了Polynomial Kernal、Gaussian Kernel等内容,文中的图片都是截取自在线课程的讲义。
欢迎到我的博客跟踪最新的内容变化。
如果有任何错误或者建议,欢迎指出,感激不尽!
--
本系列文章已发三章,前两章的地址如下:
- 一、线性SVM
- 二、SVM的对偶问题
经过上一章的推导,我们的SVM对偶问题已经是这个形式了
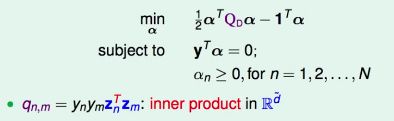
这个问题的瓶颈在于矩阵Q的计算,而q(n,m)=ynymZn’*Zm,需要计算R(d)空间内的两个向量的内积,并没有摆脱d的依赖。
问题:我们如何才能快速计算Zn’Zm=Φ(Xn)’Φ(Xm)呢?如何才能比O(d~)快呢?
从Z空间的角度看,这就是两个d维向量的内积,不可能快于O(d)。
但如果从原始的X空间来看,这一步其实是两步:我们首先把原始资料(Xn,yn)通过转换Φ映射到空间Z,再计算内积。
如果我们能直接在X空间内完成这两步,应该可以快于O(d~)。
Kernel Trick
简单的例子
首先考虑一个简单的二次多项式转换Φ2,设原始X空间的维度是d,即原始资料有d个特征。
注意:为了简单起见,该转换函数同时包含了相同的x1*x2和x2*x1
我们尝试推导直接在X空间内完成以上两步(映射、内积)所对应的函数是怎么样的
我们在X空间内任意选取两个特征向量X和X’
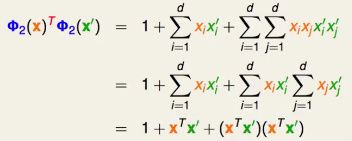
发现Z空间内的内积,可以由X空间内的内积表达出来。
这样我们不用先花O(d2)的力气进行转换,再花O(d2)的力气进行内积计算,我们可以直接先花O(d)的力气算出在X空间内的内积,在计算中再把它平方就好了,这样花费的时间不过是O(d)的复杂度。
我们把这个“转换”和“内积”合二为一的函数叫做核函数(kernel function),所以某个特征转换就对应到某个kernel function,我们希望kernel function比较容易计算。
有了kernel function后,我们可以把求解SVM的对偶问题时,需要计算Zn’Zm的地方都换成kernel function表示的形式。

注意W可以由ynZn的α线性组合得到,W’Z同样包含Zn’Z,因此也可以利用kernel function快速计算。
这种技巧就叫做kernel trick,它的核心是通过利用一个X空间内的计算高效的kernel function的计算,来映射到经过特征转换到Z空间后的两个向量的内积结果。
由于核函数的计算是在X空间内完成的,它就避免了对Z空间的高维度d~的依赖。
Kernel Hard-Margin SVM Algorithm
我们称这种利用了kernel trick进行高维度特征转换的SVM为kernel SVM,它的一般求解过程如下:
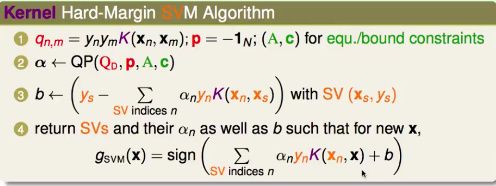
它的时间复杂度
- 计算NN的矩阵Q,时间复杂度是O(N^2)O(kernel function)
- QP求解,只有N个变量,N+1个条件
- & 4. O(#SV)*O(kernel function) [#SV代表SV的数量]
因此,只要kernel function的求解和d无关,可以很快算出来,那么以上步骤就可以很快地、和d无关地计算出来。
所以,kernel SVM本质上就是把原来SVM的瓶颈部分,利用了核函数这种计算上的便捷方法,从而避免了对d~的依赖的一种SVM,它同样只需要支撑向量SV点就可以进行新数据的预测。
多项式核
上一节中作为例子的二次多项式转换并不是唯一的二次多项式转换,下面介绍一些常用的多项式转换及其对应的核函数。
如果我们把所有的一次项都放缩√2倍,则
如果我们把二次项和一次项再一并进行γ倍的放缩,则
即
这样经过适当放缩后的多项式转换的核函数,其数学表达形式看起来更加整洁一点,这是大家平常比较常用的一种形式,也比较容易延伸到更高次方的多项式。
其实放缩前的蓝色的Φ2和放缩后的绿色的Φ2的特征转换空间的能力是一样的,它的缩放系数最终会被线性函数的W中的元素的放缩所包含,但它们确实是不同的转换,最终算出来的形式不一样,是因为它们定义了不同的内积,在内积空间中,不同的内积,就代表不同的距离,不同的距离就有不同的几何特性,对于SVM算出的Margin就不一样,就可能会得到不同的边界。
因为绿色的Φ2比较简单,我们一般直接把它叫做K2,相对比较常用。
不同kernel的几何表现
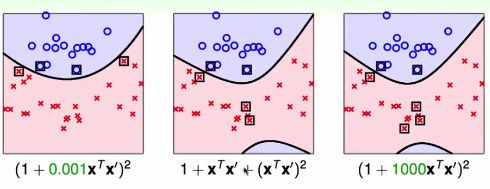
因此不同的二次多项式转换,g(svm)可能不同,支撑向量SVs也不同。
在学习之前,很难说究竟哪一个更好。
因此,kernel的改变,同时就意味着margin距离的几何定义的改变。
我们需要选择kernel,就像之前对转换Φ做选择,因为转换现在已经包含在kernel里面了。
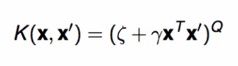
常用一般多项式核
对于原来的K2,我们还可以加一个自由度ζ,来表示常数项的放缩。
对应的转换为
推广到3次方、4次方......Q次方
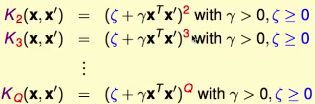
我们将转换ΦQ嵌入到(γ,ζ)这些参数的选择中,这样就允许我们计算非常高次的多项式转换的空间中的large-margin问题,该问题不再依赖于转换空间的维度d~。

SVM + 多项式核 = 多项式SVM
注意:有时候转换比较简单时,直接求解原始的SVM问题反而更加简单有效,而不必利用kernel求解SVM的对偶问题,比如linear kernel K1,我们之前说过,应该首先尝试简单的线性模型。
高斯核
我们之前使用kernel function来将到Z空间的转换和内积合成一步,形成了一个X空间内的函数,从而节省了力气,如果我们能够找到一个映射到无限多维的Z空间的核函数,是不是意味着我们可以使用无限多维的转换呢?
一维特征
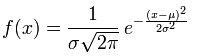
我们先考虑简单情况,假设输入特征只有一个维度,即X=(x),我们考虑一个特别的函数K(x,x’)

注意第三步用到了泰勒公式在0点处的展开,即麦克劳林展开,e^x的麦克劳林展开如下:
根据泰勒公式


这样我们就得到K(x,x’)就是经过这个无限多维转换Φ(x)的核函数。
一般的高斯核
更一般地,X有多个维度,有γ放缩的高斯函数都可以这样表达核函数
RBF核
我们来观察一下Gaussian SVM的Hypothesis是什么形式

不难发现g(svm)是很多 中心在支撑向量SV Xn 上面的高斯函数的线性组合。
因此,很多人也把高斯核叫做Radial Basis Function (辐射状(类似高斯函数的形状)的基函数(用来作线性组合的函数) Kernel,即RBF Kernel。
因此,Gaussian SVM就是找到对中心在Xn上的高斯函数进行线性组合的系数αn,并满足在无限多维空间里面最大margin的要求。
高斯SVM的几何表现
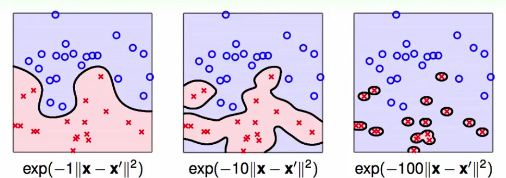
γ变大,相当于高斯函数的标准差σ变小,Gaussians就变得尖了,线性组合后曲线就会不均匀,变得不平滑甚至产生孤岛。
虽然有large margin的保证可以尽量避免overfit,但如果γ选取的不好(过大),还是可能overfit。
因此,使用Gaussian SVM时候,要慎重选择参数γ,通常不建议使用太大的γ。
无限大的γ
如果γ->∞,那么K(x,x')=exp(-γ|x-x'|^2)会趋向于什么呢?
如果x=x',则不论γ为多少,K(x,x')=1。
如果x!=x',则当γ->∞时,K(x,x')->0。
因此K(limit)好像是一个脉冲函数,它是当γ趋向于∞时,高斯函数变得尖尖的极端情况。
因此K(limit)=[[ x=x' ]] ,[[ ]]表示布尔运算。
不同Kernel的优缺点
linear kernel
优点:
- 简单、安全,应该首先尝试
- 有专门针对primal问题设计的QP Solver,比较快,没必要解对偶问题
- 模型可解释性好,W和支撑向量SV可以告诉我们模型认为哪些feature或者data point是重要的。
缺点:
- 应用场所有限,如果数据不是线性可分,就不可用
Polynomial Kernel
优点:
- 比linear的应用限制更少,可以解决non-linear separable的数据
- 可以通过Q很强地控制模型的物理意义,比如你知道数据的关系是几次方,则可以直接通过Q来表达这种信息。
缺点:
- kernel function的计算在数值上有困难,当Q变大时
* 如果|ξ+γX’X'|<1,则K->0
* 如果|ξ+γX’X'|>1,则K->big
- 有三个参数(γ,ξ,Q)需要选择,选择上比较困难
因此,Polynomial Kernel通常只会用在你已经大概知道要用的Q是多少,且Q不是很大。
有时,当Q比较小时,直接把Z空间展开,解primal SVM也很有效率。
Gaussian Kernel

优点:
- 比linear/poly都更加powerful
- kernel function的范围在[0,1],因此数值计算上的困难度比poly要低
- 只有一个参数γ需要选择,比poly在参数选择上更加简单
缺点:
- 比较难于解释--没有计算出来W
- 比linear要更慢
- 过于powerful,容易overfit
Gaussian Kernel是最常用的SVM Kernel之一,但是使用时要小心选择参数。
其他合理的Kernels
Kernel代表什么?
Kernel代表内积,其实就是代表Z空间内的两个向量Φ(x)和Φ(x’)的相似性,因此我们可以直接从相似性衡量的效果出发,定义出自己的Kernel。
但并不是所有相似性衡量都可以是Kernel,需要数学上证明。
Mercer's Condition
Valid Kernel的必要条件:
- 对称矩阵,因为向量内积是对称的
- 考虑矩阵K,其中Kij=K(Xi,Xj)
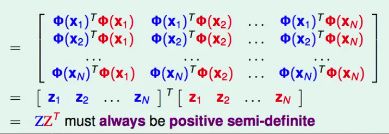
K = Z*Z’,是两个Z矩阵的相乘,根据线性代数的理论,K一定是半正定(positive semi-definite)的。
以上两个条件,被数学家证明还是充分条件,这两个条件是否满足就代表着你定义的kernel function是否合法,这两个条件就叫做Mercer's Condition。
定义自己的kernel虽然可能,但是很难。
我们目前从SVM的Primal问题推导到了Kernel,但是还没有解决如果Z空间内的数据点不是linear-separable的问题,我们坚持所有的OO和XX必须用一个超平面完美分割,这样可能会造成问题,比如模型可能去fit Noise等等,容易过拟合,我们能否把像Gaussian SVM里面的这种overfitting的情形再用一些方式控制解决,这需要将目前的Hard Margin改为Soft Margin,允许一些点可以出错,我们将在下一章探讨Soft Margin SVM的问题。
Mind Map Summary

有关Soft-Margin SVM及更多机器学习算法相关的内容将在日后的几篇文章中分别给出,敬请关注!