Class 本质
1. 结构代码
// 被弃用的源码
struct objc_class {
Class _Nonnull isa OBJC_ISA_AVAILABILITY;
#if !__OBJC2__
Class _Nullable super_class OBJC2_UNAVAILABLE;
const char * _Nonnull name OBJC2_UNAVAILABLE;
long version OBJC2_UNAVAILABLE;
long info OBJC2_UNAVAILABLE;
long instance_size OBJC2_UNAVAILABLE;
struct objc_ivar_list * _Nullable ivars OBJC2_UNAVAILABLE;
struct objc_method_list * _Nullable * _Nullable methodLists OBJC2_UNAVAILABLE;
struct objc_cache * _Nonnull cache OBJC2_UNAVAILABLE;
struct objc_protocol_list * _Nullable protocols OBJC2_UNAVAILABLE;
#endif
} OBJC2_UNAVAILABLE;
// 当前版本的源码
struct objc_class : objc_object {
Class superclass;
cache_t cache; // 方法缓存
class_data_bits_t bits; // 用于获取具体类信息
// 存储着方法列表, 属性列表, 协议列表
class_rw_t *data() {
reture bits.data();
}
void setData(class_rw_t *newData) {
bits.setData(newData);
}
}
class_rw_t *data() {
return (class_rw_t *)(bits & FAST_DATA_MASK);
}
1.1 class_rw_t
bits & FAST_DATA_MASK位运算之后, 可以得到 class_rw_t, 在class_rw_t中存储着方法列表, 属性列表, 协议列表.
struct class_rw_t {
uint32_t flags;
uint32_t version;
const class_ro_t *ro; // 成员变量
method_array_t methods; // 方法列表
property_array_t properties; // 属性列表
protocol_array_t protocols; // 协议列表
Class firstSubclass;
Class nextSiblingClass;
char *demangledName;
}
1.2 class_ro_t
class_ro_t中也有存储方法, 属性, 协议, 成员变量列表.
struct class_ro_t {
uint32_t flags;
uint32_t instanceStart;
uint32_t instanceSize; // instance对象占用内存空间
#ifdef __LP64__
uint32_t reserved;
#endif
const uint8_t *ivarLayout;
const char *name; // 类名
method_list_t *baseMethodList;
protocol_list_t *baseProtocols;
const ivar_list_t *ivars; // 成员变量列表
const uint8_t *weakIvarLayout;
property_list_t *baseProperties;
method_list_t*baseMethod() const {
return baseMethodList;
}
}
总结
以方法列表为例,class_rw_t中的methods是二维数组的结构,并且可读可写,因此可以动态的添加方法,并且更加便于分类方法的添加。因为我们在Category的本质里面提到过,attachList函数内通过memmove 和 memcpy两个操作将分类的方法列表合并在本类的方法列表中。那么此时就将分类的方法和本类的方法统一整合到一起了。
其实一开始类的方法,属性,成员变量属性协议等等都是存放在class_ro_t中的,当程序运行的时候,需要将分类中的列表跟类初始的列表合并在一起的时,就会将class_ro_t中的列表和分类中的列表合并起来存放在class_rw_t中,也就是说class_rw_t中有部分列表是从class_ro_t里面拿出来的。并且最终和分类的方法合并。可以通过源码提现这里一点。
static Class realizeClass(Class cls)
{
runtimeLock.assertWriting();
const class_ro_t *ro;
class_rw_t *rw;
Class supercls;
Class metacls;
bool isMeta;
if (!cls) return nil;
if (cls->isRealized()) return cls;
assert(cls == remapClass(cls));
// 最开始cls->data是指向ro的
ro = (const class_ro_t *)cls->data();
if (ro->flags & RO_FUTURE) {
// rw已经初始化并且分配内存空间
rw = cls->data(); // cls->data指向rw
ro = cls->data()->ro; // cls->data()->ro指向ro
cls->changeInfo(RW_REALIZED|RW_REALIZING, RW_FUTURE);
} else {
// 如果rw并不存在,则为rw分配空间
rw = (class_rw_t *)calloc(sizeof(class_rw_t), 1); // 分配空间
rw->ro = ro; // rw->ro重新指向ro
rw->flags = RW_REALIZED|RW_REALIZING;
// 将rw传入setData函数,等于cls->data()重新指向rw
cls->setData(rw);
}
}
那么从上述源码中就可以发现,类的初始信息本来其实是存储在class_ro_t中的,并且ro本来是指向cls->data()的,也就是说bits.data()得到的是ro,但是在运行过程中创建了class_rw_t,并将cls->data指向rw,同时将初始信息ro赋值给rw中的ro。最后在通过setData(rw)设置data。那么此时bits.data()得到的就是rw,之后再去检查是否有分类,同时将分类的方法,属性,协议列表整合存储在class_rw_t的方法,属性及协议列表中。
通过上述对源码的分析,我们对class_rw_t内存储方法、属性、协议列表的过程有了更清晰的认识,那么接下来探寻class_rw_t中是如何存储方法的。
2. class_rw_t中是如何存储方法的
2.1 method_t
我们知道method_array_t、property_array_t、protocol_array_t中以method_array_t为例,method_array_t中最终存储的是method_t,method_t是对方法、函数的封装,每一个方法对象就是一个method_t。通过源码看一下method_t的结构体
struct method_t {
SEL name; // 函数名
const char *types; // 编码(返回值类型,参数类型)
IMP imp; // 指向函数的指针(函数地址)
};
2.2 SEL
SEL代表方法名(选择器), 底层跟 char *类似 typedef struct objc_selector *SEL, 可以把SEL看做是方法名或者是字符串 @selector() 和 sel_registerName().
获取SEL字符串: sel_getName() NSStringFromSelector()
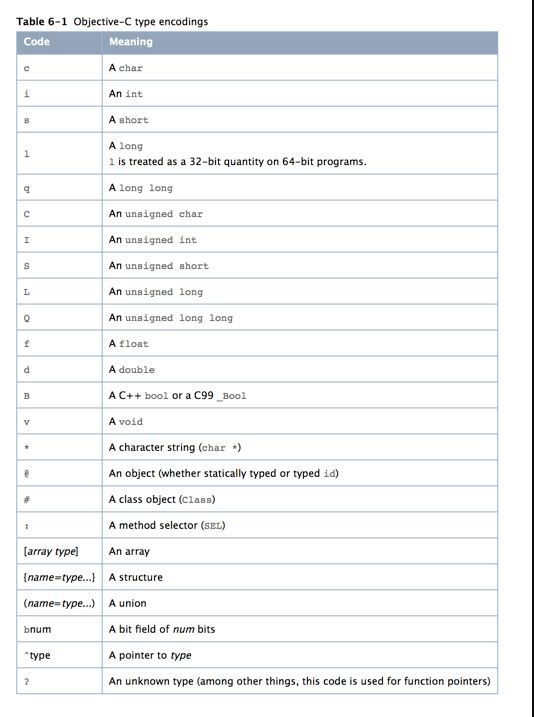
2.3 types
types包含了函数返回值, 参数编码的字符串. 通过字符串拼接的方式将返回值和参数拼接成一个字符串, 来表示函数返回值及参数. v16@0:8
v 16 @ 0 : 8
void id SEL
// 16表示参数的占用空间大小, id后面的0 表示从0位开始存储, id占8位空间.
// SEL后面的8表示从第8位开始存储, SEL同样占8位空间
2.4 IMP
IMP 代表函数的具体实现, 存储的是函数的地址. 找到该地址, 也就找到了函数的实现, 进而进行函数调用.
2.5 cache_t
struct cache_t {
struct bucket_t *_buckets; // 散列表 数组
mask_t _mask; // 散列表的长度 -1
mask_t _occupied; // 已经缓存的方法数量
};
bucket_t是以散列表的方式存储方法列表的(哈希表).
散列表(hash table) 是根据关键码值(key value)而直接进行访问的数据结构. 也就是说, 他通过把关键码值映射到列表中一个位置来访问记录, 以加快查找的速度. 这个映射函数叫散列函数, 存放记录的数组叫做散列表.
struct bucket_t {
private:
cache_key_t _key; // SEL作为Key
IMP _imp; // 函数的内存地址
};
散列表实现原理
cache_fill cache_fill_nolock
void cache_fill(Class cls, SEL sel, IMP imp, id receiver)
{
#if !DEBUG_TASK_THREADS
mutex_locker_t lock(cacheUpdateLock);
cache_fill_nolock(cls, sel, imp, receiver);
#else
_collecting_in_critical();
return;
#endif
}
static void cache_fill_nolock(Class cls, SEL sel, IMP imp, id receiver)
{
cacheUpdateLock.assertLocked();
// 如果没有initialize直接return
if (!cls->isInitialized()) return;
// 确保线程安全,没有其他线程添加缓存
if (cache_getImp(cls, sel)) return;
// 通过类对象获取到cache
cache_t *cache = getCache(cls);
// 将SEL包装成Key
cache_key_t key = getKey(sel);
// 占用空间+1
mask_t newOccupied = cache->occupied() + 1;
// 获取缓存列表的缓存能力,能存储多少个键值对
mask_t capacity = cache->capacity();
if (cache->isConstantEmptyCache()) {
// 如果为空的,则创建空间,这里创建的空间为4个。
cache->reallocate(capacity, capacity ?: INIT_CACHE_SIZE);
}
else if (newOccupied <= capacity / 4 * 3) {
// 如果所占用的空间占总数的3/4一下,则继续使用现在的空间
}
else {
// 如果占用空间超过3/4则扩展空间
cache->expand();
}
// 通过key查找合适的存储空间。
bucket_t *bucket = cache->find(key, receiver);
// 如果key==0则说明之前未存储过这个key,占用空间+1
if (bucket->key() == 0) cache->incrementOccupied();
// 存储key,imp
bucket->set(key, imp);
}
reallocate
void cache_t::reallocate(mask_t oldCapacity, mask_t newCapacity)
{
// 旧的散列表能否被释放
bool freeOld = canBeFreed();
// 获取旧的散列表
bucket_t *oldBuckets = buckets();
// 通过新的空间需求量创建新的散列表
bucket_t *newBuckets = allocateBuckets(newCapacity);
assert(newCapacity > 0);
assert((uintptr_t)(mask_t)(newCapacity-1) == newCapacity-1);
// 设置Buckets和Mash,Mask的值为散列表长度-1
setBucketsAndMask(newBuckets, newCapacity - 1);
// 释放旧的散列表
if (freeOld) {
cache_collect_free(oldBuckets, oldCapacity);
cache_collect(false);
}
}
上述源码中首次传入reallocate函数的newCapacity为INIT_CACHE_SIZE,INIT_CACHE_SIZE是个枚举值,也就是4。因此散列表最初创建的空间就是4个。
enum {
INIT_CACHE_SIZE_LOG2 = 2,
INIT_CACHE_SIZE = (1 << INIT_CACHE_SIZE_LOG2)
};
expand()
当散列表的空间被占用超过3/4的时候,散列表会调用expand ()函数进行扩展,我们来看一下expand ()函数内散列表如何进行扩展的。
void cache_t::expand()
{
cacheUpdateLock.assertLocked();
// 获取旧的散列表的存储空间
uint32_t oldCapacity = capacity();
// 将旧的散列表存储空间扩容至两倍
uint32_t newCapacity = oldCapacity ? oldCapacity*2 : INIT_CACHE_SIZE;
// 为新的存储空间赋值
if ((uint32_t)(mask_t)newCapacity != newCapacity) {
newCapacity = oldCapacity;
}
// 调用reallocate函数,重新创建存储空间
reallocate(oldCapacity, newCapacity);
}
find
最后来看一下散列表中如何快速的通过key找到相应的bucket呢?我们来到find函数内部
bucket_t * cache_t::find(cache_key_t k, id receiver)
{
assert(k != 0);
// 获取散列表
bucket_t *b = buckets();
// 获取mask
mask_t m = mask();
// 通过key找到key在散列表中存储的下标
mask_t begin = cache_hash(k, m);
// 将下标赋值给i
mask_t i = begin;
// 如果下标i中存储的bucket的key==0说明当前没有存储相应的key,将b[i]返回出去进行存储
// 如果下标i中存储的bucket的key==k,说明当前空间内已经存储了相应key,将b[i]返回出去进行存储
do {
if (b[i].key() == 0 || b[i].key() == k) {
// 如果满足条件则直接reutrn出去
return &b[i];
}
// 如果走到这里说明上面不满足,那么会往前移动一个空间重新进行判定,知道可以成功return为止
} while ((i = cache_next(i, m)) != begin);
// hack
Class cls = (Class)((uintptr_t)this - offsetof(objc_class, cache));
cache_t::bad_cache(receiver, (SEL)k, cls);
}
函数cache_hash (k, m)用来通过key找到方法在散列表中存储的下标,来到cache_hash (k, m)函数内部.
static inline mask_t cache_hash(cache_key_t key, mask_t mask)
{
return (mask_t)(key & mask);
}
_mask
_mask的值是散列表的长度减一,那么任何数通过与_mask进行按位与运算之后获得的值都会小于等于_mask,因此不会出现数组溢出的情况。
总结
当第一次使用方法时,消息机制通过isa找到方法之后,会对方法以SEL为keyIMP为value的方式缓存在cache的_buckets中,当第一次存储的时候,会创建具有4个空间的散列表,并将_mask的值置为散列表的长度减一,之后通过SEL & mask计算出方法存储的下标值,并将方法存储在散列表中。举个例子,如果计算出下标值为3,那么就将方法直接存储在下标为3的空间中,前面的空间会留空。
当散列表中存储的方法占据散列表长度超过3/4的时候,散列表会进行扩容操作,将创建一个新的散列表并且空间扩容至原来空间的两倍,并重置_mask的值,最后释放旧的散列表,此时再有方法要进行缓存的话,就需要重新通过SEL & mask计算出下标值之后在按照下标进行存储了。
如果一个类中方法很多,其中很可能会出现多个方法的SEL & mask得到的值为同一个下标值,那么会调用cache_next函数往下标值-1位去进行存储,如果下标值-1位空间中有存储方法,并且key不与要存储的key相同,那么再到前面一位进行比较,直到找到一位空间没有存储方法或者key与要存储的key相同为止,如果到下标0的话就会到下标为_mask的空间也就是最大空间处进行比较。
当要查找方法时,并不需要遍历散列表,同样通过SEL & mask计算出下标值,直接去下标值的空间取值即可,同上,如果下标值中存储的key与要查找的key不相同,就去前面一位查找。这样虽然占用了少量控件,但是大大节省了时间,也就是说其实apple是使用空间换取了存取的时间。