stage
假如我们有个 spark job 依赖关系如下:
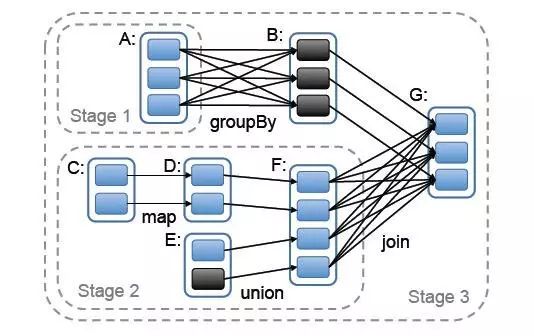
划分后的RDD结构为:

最终我们得到了整个执行过程:

中间就涉及到shuffle 过程,前一个stage 的 ShuffleMapTask 进行 shuffle write, 把数据存储在 blockManager 上面, 并且把数据位置元信息上报到 driver 的 mapOutTrack 组件中, 下一个 stage 根据数据位置元信息, 进行 shuffle read, 拉取上个stage 的输出数据。
这边文章讲述的就是其中的 shuffle write 过程。
spark shuffle 演进的历史
Spark 0.8及以前 Hash Based Shuffle
Spark 0.8.1 为Hash Based Shuffle引入File Consolidation机制
Spark 0.9 引入ExternalAppendOnlyMap
Spark 1.1 引入Sort Based Shuffle,但默认仍为Hash Based Shuffle
Spark 1.2 默认的Shuffle方式改为Sort Based Shuffle
Spark 1.4 引入Tungsten-Sort Based Shuffle
Spark 1.6 Tungsten-sort并入Sort Based Shuffle
Spark 2.0 Hash Based Shuffle退出历史舞台
总结一下, 就是最开始的时候使用的是 Hash Based Shuffle, 这时候每一个Mapper会根据Reducer的数量创建出相应的bucket,bucket的数量是M R ,其中M是Map的个数,R是Reduce的个数。这样会产生大量的小文件,对文件系统压力很大,而且也不利于IO吞吐量。后面忍不了了就做了优化,把在统一core上运行的多个Mapper 输出的合并到同一个文件,这样文件数目就变成了 cores R 个了。
举个例子:
本来是这样的,3个 map task, 3个 reducer, 会产生 9个小文件

是不是很恐怖, 后面改造之后
4个map task, 4个reducer, 如果不使用 Consolidation机制, 会产生 16个小文件。
但是但是现在这 4个 map task 分两批运行在 2个core上, 这样只会产生 8个小文件
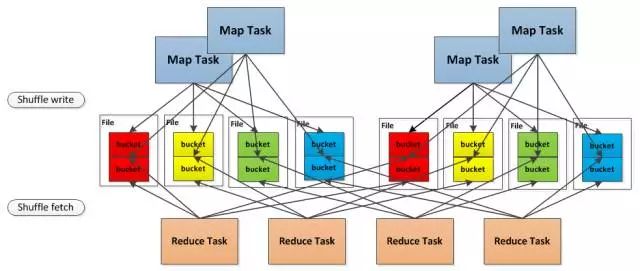
在同一个 core 上先后运行的两个 map task的输出, 对应同一个文件的不同的 segment上, 称为一个 FileSegment, 形成一个 ShuffleBlockFile,
后面就引入了 Sort Based Shuffle, map端的任务会按照Partition id以及key对记录进行排序。同时将全部结果写到一个数据文件中,同时生成一个索引文件, 再后面就就引入了 Tungsten-Sort Based Shuffle, 这个是直接使用堆外内存和新的内存管理模型,节省了内存空间和大量的gc, 是为了提升性能。
现在2.1 分为三种writer, 分为 BypassMergeSortShuffleWriter, SortShuffleWriter 和 UnsafeShuffleWriter,顾名思义,大家应该可以对应上,我们本着过时不讲的原则, 本文中只描述这三种 writer 的实现细节。
三种 writer 的分类
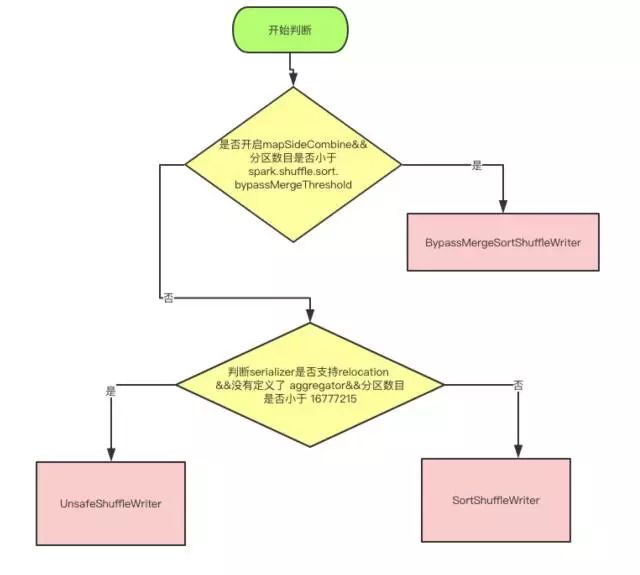
上面是使用哪种 writer 的判断依据, 是否开启 mapSideCombine 这个判断,是因为有些算子会在 map 端先进行一次 combine, 减少传输数据。 因为 BypassMergeSortShuffleWriter 会临时输出Reducer个(分区数目)小文件,所以分区数必须要小于一个阀值,默认是小于200。
UnsafeShuffleWriter需要Serializer支持relocation,Serializer支持relocation:原始数据首先被序列化处理,并且再也不需要反序列,在其对应的元数据被排序后,需要Serializer支持relocation,在指定位置读取对应数据。
BypassMergeSortShuffleWriter 实现细节
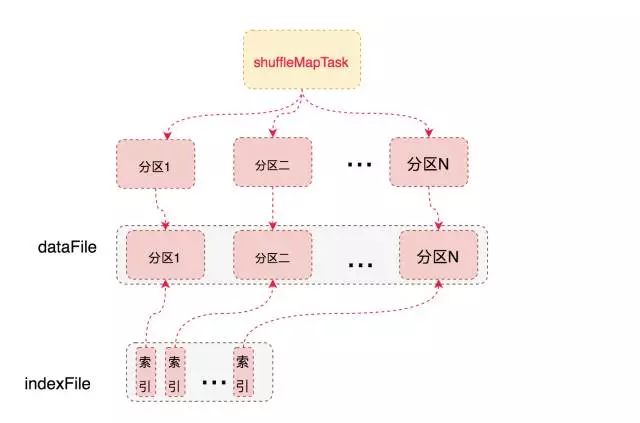
BypassMergeSortShuffleWriter和Hash Shuffle中的HashShuffleWriter实现基本一致, 唯一的区别在于,map端的多个输出文件会被汇总为一个文件。 所有分区的数据会合并为同一个文件,会生成一个索引文件,是为了索引到每个分区的起始地址,可以随机 access 某个partition的所有数据。
但是需要注意的是,这种方式不宜有太多分区,因为过程中会并发打开所有分区对应的临时文件,会对文件系统造成很大的压力。
具体实现就是给每个分区分配一个临时文件,对每个 record的key 使用分区器(模式是hash,如果用户自定义就使用自定义的分区器)找到对应分区的输出文件句柄,直接写入文件,没有在内存中使用 buffer。 最后copyStream方法把所有的临时分区文件拷贝到最终的输出文件中,并且记录每个分区的文件起始写入位置,把这些位置数据写入索引文件中。
SortShuffleWriter 实现细节
我们可以先考虑一个问题,假如我有 100亿条数据,但是我们的内存只有1M,但是我们磁盘很大, 我们现在要对这100亿条数据进行排序,是没法把所有的数据一次性的load进行内存进行排序的,这就涉及到一个外部排序的问题,我们的1M内存只能装进1亿条数据,每次都只能对这 1亿条数据进行排序,排好序后输出到磁盘,总共输出100个文件,最后怎么把这100个文件进行merge成一个全局有序的大文件。我们可以每个文件(有序的)都取一部分头部数据最为一个 buffer, 并且把这 100个 buffer放在一个堆里面,进行堆排序,比较方式就是对所有堆元素(buffer)的head元素进行比较大小, 然后不断的把每个堆顶的 buffer 的head 元素 pop 出来输出到最终文件中, 然后继续堆排序,继续输出。如果哪个buffer 空了,就去对应的文件中继续补充一部分数据。最终就得到一个全局有序的大文件。
如果你能想通我上面举的例子,就差不多搞清楚sortshufflewirter的实现原理了,因为解决的是同一个问题。
SortShuffleWriter 中的处理步骤就是
使用 PartitionedAppendOnlyMap 或者 PartitionedPairBuffer 在内存中进行排序, 排序的 K 是(partitionId, hash(key)) 这样一个元组。
如果超过内存 limit, 我 spill 到一个文件中,这个文件中元素也是有序的,首先是按照 partitionId的排序,如果 partitionId 相同, 再根据 hash(key)进行比较排序
如果需要输出全局有序的文件的时候,就需要对之前所有的输出文件 和 当前内存中的数据结构中的数据进行 merge sort, 进行全局排序
和我们开始提的那个问题基本类似,不同的地方在于,需要对 Key 相同的元素进行 aggregation, 就是使用定义的 func 进行聚合, 比如你的算子是 reduceByKey(+), 这个func 就是加法运算, 如果两个key 相同, 就会先找到所有相同的key 进行 reduce(+) 操作,算出一个总结果 Result,然后输出数据(K,Result)元素。
SortShuffleWriter 中使用 ExternalSorter 来对内存中的数据进行排序,ExternalSorter内部维护了两个集合PartitionedAppendOnlyMap、PartitionedPairBuffer, 两者都是使用了 hash table 数据结构, 如果需要进行 aggregation, 就使用 PartitionedAppendOnlyMap(支持 lookup 某个Key,如果之前存储过相同key的K-V 元素,就需要进行 aggregation,然后再存入aggregation后的 K-V), 否则使用 PartitionedPairBuffer(只进行添K-V 元素)

我们可以看上图, PartitionedAppendOnlyMap 中的 K 是(PatitionId, K)的元组, 这样就是先按照partitionId进行排序,如果 partitionId 相同,再按照 hash(key)再进行排序。

首先看下 AppendOnlyMap, 这个很简单就是个 hash table,其中的 K 是(PatitionId, hash(Key))的元组, 当要 put(K, V) 时,先 hash(K) 找存放位置,如果存放位置已经被占用,就使用 Quadratic probing 探测方法来找下一个空闲位置。对于图中的 K6 来说,第三次查找找到 K4 后面的空闲位置,放进去即可。get(K6) 的时候类似,找三次找到 K6,取出紧挨着的 V6,与先来的 value 做 func,结果重新放到 V6 的位置。
下面看下 ExternalAppendOnlyMap 结构, 这个就是内存中装不下所有元素,就涉及到外部排序,
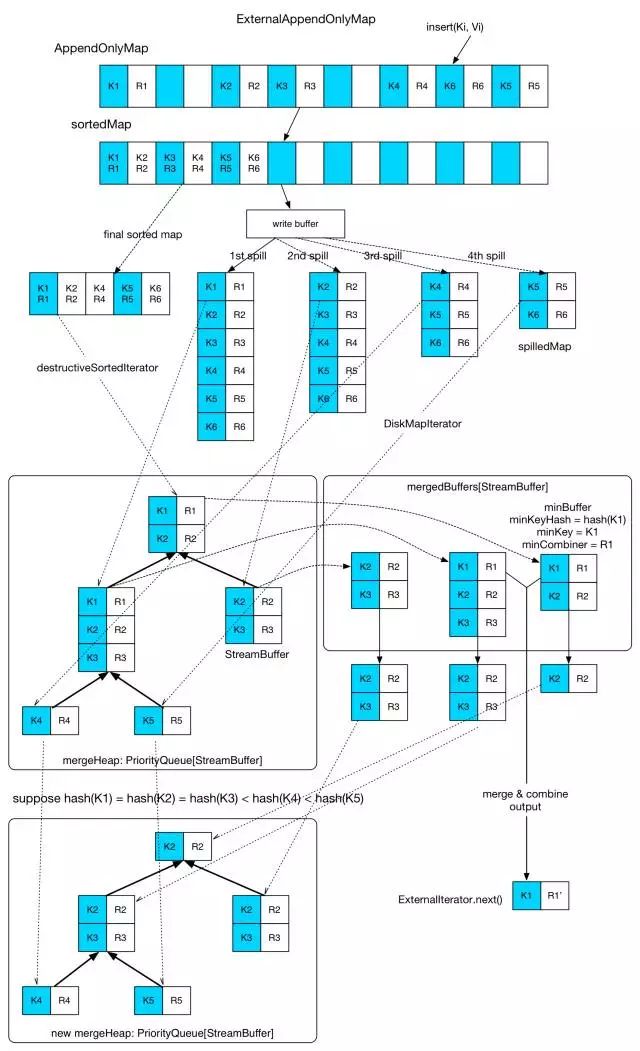
上图中可以看到整个原理图,逻辑也很简单, 内存不够的时候,先spill了四次,输出到文件中的元素都是有序的,读取的时候都是按序读取,最后跟内存剩余的数据进行 全局merge。
merge 过程就是 每个文件读取部分数据(StreamBuffer)放到 mergeHeap 里面, 当前内存中的 PartitionedAppendOnlyMap 也进行 sort,形成一个 sortedMap 放在 mergeHeap 里面, 这个 heap 是一个 优先队列 PriorityQueue, 并且自定义了排序方式,就是取出堆元素StreamBuffer的head元素进行比较大小,
val heap = new mutable.PriorityQueue[Iter]()(new Ordering[Iter] {
// Use the reverse of comparator.compare because PriorityQueue dequeues the max
override def compare(x: Iter, y: Iter): Int = -comparator.compare(x.head._1, y.head._1)
})
这样的话,每次从堆顶的 StreamBuffer 中 pop 出的 head 元素就是全局最小的元素(记住是按照(partitionId,hash(Key))排序的), 如果需要 aggregation, 就把这些key 相同的元素放在一个一个 mergeBuffers 中, 第一个被放入 mergeBuffers 的 StreamBuffer 被称为 minBuffer,那么 minKey 就是 minBuffer 中第一个 record 的 key。当 merge-combine 的时候,与 minKey 有相同的Key的records 被 aggregate 一起,然后输出。
如果不需要 aggregation, 那就简单了, 直接把 堆顶的 StreamBuffer 中 pop 出的 head 元素 返回就好了。

最终读取的时候,从整个 全局 merge 后的读取迭代器中读取的数据,就是按照 partitionId 从小到大排序的数据, 读取过程中使用再按照 分区分段, 并且记录每个分区的文件起始写入位置,把这些位置数据写入索引文件中。
https://mp.weixin.qq.com/s?__biz=MzI3MjY2MTYzMA==&mid=2247483885&idx=1&sn=c9a36ccd5c5297ce106a199d21645856&scene=21#wechat_redirect