文件目录:
├── mark
│ └── dog.jpg
└── txt
└── dog.txt
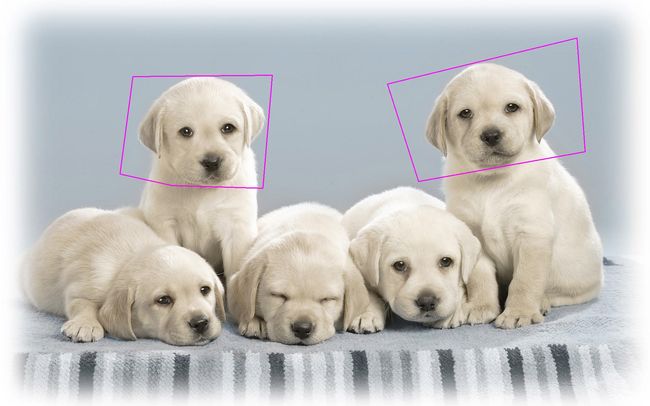
dog.txt
392,226,804,222,776,556,508,548,354,514
1144,248,1704,112,1728,448,1236,536

对应的框:
import os
import cv2
import math
import random
import numpy as np
def rotation_point(img, angle=15, points=None):
cols = img.shape[1]
rows = img.shape[0]
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), angle, 1)
heightNew = int(cols * math.fabs(math.sin(math.radians(angle))) + rows * math.fabs(math.cos(math.radians(angle))))
widthNew = int(rows * math.fabs(math.sin(math.radians(angle))) + cols * math.fabs(math.cos(math.radians(angle))))
M[0, 2] += (widthNew - cols) / 2
M[1, 2] += (heightNew - rows) / 2
img = cv2.warpAffine(img, M, (widthNew, heightNew))
a = M[:, :2] ##a.shape (2,2)
b = M[:, 2:] ###b.shape(2,1)
b = np.reshape(b, newshape=(1, 2))
a = np.transpose(a)
v_pt = []
for point in points:
len_1 = len(point)
point = np.reshape(point, newshape=(len_1, 2)) # point = np.reshape(point, newshape=(len(point) * 4, 2))
point = np.dot(point, a) + b
point = np.reshape(point, newshape=(len_1, 2))
point = point.astype(int)
v_pt.append(point)
return img, v_pt
def get_pt(txt_path):
vv_pt_new = []
with open(txt_path,'r') as fr:
txt_line = fr.readlines()
for line in txt_line:
line = line.strip()
pts = line.split(',')
vv_pt = []
len_pts = len(pts)
for i in range(0,int(len_pts),2):
v_pt = []
x = pts[i]
y = pts[i + 1]
v_pt.append(int(x))
v_pt.append(int(y))
vv_pt.append(v_pt)
vv_pt_new.append(vv_pt)
return vv_pt_new
def write_pt(txt_path,vv_pt_rot):
with open(txt_path,'a')as fw:
for pts in vv_pt_rot:
for i,pt in enumerate(pts):
x = pt[0]
y = pt[1]
fw.write(str(x))
fw.write(',')
fw.write(str(y))
if i != len(pts)-1:
fw.write(',')
else:
fw.write('\n')
def show_debug(img_,vv_pt,m_rot,vv_pt_rot,path_show,b_show_save=False):
img = img_.copy()
for val in vv_pt:
val = np.reshape(val,newshape=(len(val),2))
val = val.astype(int)
cv2.polylines(img, [val], True, (255, 0, 255), 2)
for val in vv_pt_rot:
cv2.polylines(m_rot, [val], True, (0, 255, 255), 2)
if b_show_save:
cv2.imwrite(path_show,m_rot)
cv2.imwrite(path_show.replace('.jpg','_src_.jpg'),img)
if False:
cv2.namedWindow('src',0)
cv2.imshow('src',img)
cv2.namedWindow('m_rot',0)
cv2.imshow('m_rot',m_rot)
cv2.waitKey(0)
b_flg_show_rot_save = True
root_img = "/media/data_2/everyday/0801/5555/mark/"
root_pt_txt = "/media/data_2/everyday/0801/5555/txt/"
save_dir = os.path.dirname(os.path.dirname(root_img)) + '/rot/'
if not os.path.exists(save_dir):
os.makedirs(save_dir)
save_txt = save_dir + 'txt/'
save_img = save_dir + 'm_rot/'
if not os.path.exists(save_txt):
os.makedirs(save_txt)
if not os.path.exists(save_img):
os.makedirs(save_img)
save_show = ''
if b_flg_show_rot_save:
save_show = save_dir + 'show/'
if not os.path.exists(save_show):
os.makedirs(save_show)
list_img = os.listdir(root_img)
for cnt_img,img_name in enumerate(list_img):
print("cnt=%d,img_name=%s"%(cnt_img,img_name))
img_path = root_img + img_name
img = cv2.imread(img_path)
txt_name = img_name.replace('.jpg','.txt')
txt_path = root_pt_txt + txt_name
vv_pt = get_pt(txt_path)
for cnt in range(0,20):
ang = random.randint(2,350)
print("ang=%d"%(ang))
m_rot, vv_pt_rot = rotation_point(img, ang, vv_pt)
name_img_rot = img_name.replace('.jpg','_'+str(ang)+'.jpg')
name_txt_rot = name_img_rot.replace('.jpg','.txt')
save_img_path = save_img + name_img_rot
save_txt_path = save_txt + name_txt_rot
cv2.imwrite(save_img_path,m_rot)
write_pt(save_txt_path, vv_pt_rot)
if b_flg_show_rot_save:
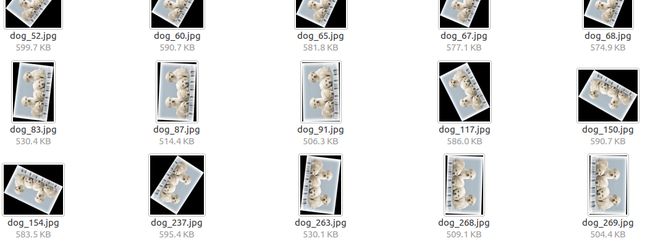
show_debug(img, vv_pt, m_rot, vv_pt_rot, save_show + name_img_rot, b_flg_show_rot_save)运行脚本生成,目录如下:
├── mark
│ └── dog.jpg
├── rot
│ ├── m_rot
│ │ ├── dog_108.jpg
│ │ ├── dog_120.jpg
│ │ ├── dog_150.jpg
│ │ ├── dog_159.jpg
│ │ ├── dog_169.jpg
│ │ ├── dog_170.jpg
│ │ ├── dog_196.jpg
│ │ ├── dog_204.jpg
│ │ ├── dog_212.jpg
│ │ ├── dog_220.jpg
│ │ ├── dog_222.jpg
│ │ ├── dog_249.jpg
│ │ ├── dog_279.jpg
│ │ ├── dog_290.jpg
│ │ ├── dog_300.jpg
│ │ ├── dog_332.jpg
│ │ ├── dog_39.jpg
│ │ ├── dog_66.jpg
│ │ ├── dog_6.jpg
│ │ └── dog_72.jpg
│ ├── show
│ │ ├── dog_108.jpg
│ │ ├── dog_120.jpg
│ │ ├── dog_150.jpg
│ │ ├── dog_159.jpg
│ │ ├── dog_169.jpg
│ │ ├── dog_170.jpg
│ │ ├── dog_196.jpg
│ │ ├── dog_204.jpg
│ │ ├── dog_212.jpg
│ │ ├── dog_220.jpg
│ │ ├── dog_222.jpg
│ │ ├── dog_249.jpg
│ │ ├── dog_279.jpg
│ │ ├── dog_290.jpg
│ │ ├── dog_300.jpg
│ │ ├── dog_332.jpg
│ │ ├── dog_39.jpg
│ │ ├── dog_66.jpg
│ │ ├── dog_6.jpg
│ │ └── dog_72.jpg
│ └── txt
│ ├── dog_108.txt
│ ├── dog_120.txt
│ ├── dog_150.txt
│ ├── dog_159.txt
│ ├── dog_169.txt
│ ├── dog_170.txt
│ ├── dog_196.txt
│ ├── dog_204.txt
│ ├── dog_212.txt
│ ├── dog_220.txt
│ ├── dog_222.txt
│ ├── dog_249.txt
│ ├── dog_279.txt
│ ├── dog_290.txt
│ ├── dog_300.txt
│ ├── dog_332.txt
│ ├── dog_39.txt
│ ├── dog_66.txt
│ ├── dog_6.txt
│ └── dog_72.txt
└── txt
└── dog.txt
dog_65.txt 示例:
369,1479,540,1104,831,1271,710,1510,614,1635
707,807,821,242,1135,362,1007,845
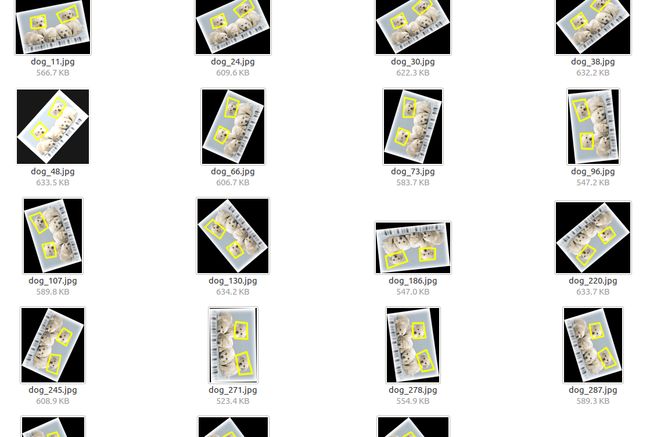
20190802 优化版本 90,180,270角度优先,旋转填充背景像素点,显示查看只保存一张原图
import os
import cv2
import math
import random
import numpy as np
def get_background(srcimg):
gray = cv2.cvtColor(srcimg,cv2.COLOR_BGR2GRAY)
hest = np.zeros([256],dtype=np.int32)
hs = gray.shape[0]
ws = gray.shape[1]
for h in range(0,hs):
for w in range(0,ws):
pix = gray[h,w]
hest[pix] += 1
idx = np.where(hest == np.max(hest))
idxx = idx[0][0]
for h in range(0,hs):
for w in range(0,ws):
pix = gray[h,w]
if idxx == pix:
return (int(srcimg[h,w,0]),int(srcimg[h,w,1]),int(srcimg[h,w,2]))
def rotation_point(img, pix_border,angle=15, points=None):
cols = img.shape[1]
rows = img.shape[0]
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), angle, 1)
heightNew = int(cols * math.fabs(math.sin(math.radians(angle))) + rows * math.fabs(math.cos(math.radians(angle))))
widthNew = int(rows * math.fabs(math.sin(math.radians(angle))) + cols * math.fabs(math.cos(math.radians(angle))))
M[0, 2] += (widthNew - cols) / 2
M[1, 2] += (heightNew - rows) / 2
img = cv2.warpAffine(img, M, (widthNew, heightNew),borderValue=pix_border)
a = M[:, :2] ##a.shape (2,2)
b = M[:, 2:] ###b.shape(2,1)
b = np.reshape(b, newshape=(1, 2))
a = np.transpose(a)
v_pt = []
for point in points:
len_1 = len(point)
point = np.reshape(point, newshape=(len_1, 2)) # point = np.reshape(point, newshape=(len(point) * 4, 2))
point = np.dot(point, a) + b
point = np.reshape(point, newshape=(len_1, 2))
point = point.astype(int)
v_pt.append(point)
return img, v_pt
def get_pt(txt_path):
vv_pt_new = []
with open(txt_path,'r') as fr:
txt_line = fr.readlines()
for line in txt_line:
line = line.strip()
pts = line.split(',')
vv_pt = []
len_pts = len(pts)
for i in range(0,int(len_pts),2):
v_pt = []
x = pts[i]
y = pts[i + 1]
v_pt.append(int(x))
v_pt.append(int(y))
vv_pt.append(v_pt)
vv_pt_new.append(vv_pt)
return vv_pt_new
def write_pt(txt_path,vv_pt_rot):
with open(txt_path,'a')as fw:
for pts in vv_pt_rot:
for i,pt in enumerate(pts):
x = pt[0]
y = pt[1]
fw.write(str(x))
fw.write(',')
fw.write(str(y))
if i != len(pts)-1:
fw.write(',')
else:
fw.write('\n')
def show_debug(img_,vv_pt,m_rot,vv_pt_rot,path_show,cnt,b_show_save=False):
img = img_.copy()
for val in vv_pt:
val = np.reshape(val,newshape=(len(val),2))
val = val.astype(int)
cv2.polylines(img, [val], True, (255, 0, 255), 5)
for val in vv_pt_rot:
cv2.polylines(m_rot, [val], True, (0, 255, 255), 5)
if b_show_save:
cv2.imwrite(path_show,m_rot)
if 0 == cnt:
cv2.imwrite(path_show.replace('.jpg','_src_.jpg'),img)
if False:
cv2.namedWindow('src',0)
cv2.imshow('src',img)
cv2.namedWindow('m_rot',0)
cv2.imshow('m_rot',m_rot)
cv2.waitKey(0)
b_flg_show_rot_save = True
root_img = "/media/data_2/everyday/0809/ctd/mark/"
root_pt_txt = "/media/data_2/everyday/0809/ctd/ctd2general/"
save_dir = os.path.dirname(os.path.dirname(root_img)) + '/rot/'
if not os.path.exists(save_dir):
os.makedirs(save_dir)
save_txt = save_dir + 'txt/'
save_img = save_dir + 'm_rot/'
if not os.path.exists(save_txt):
os.makedirs(save_txt)
if not os.path.exists(save_img):
os.makedirs(save_img)
save_show = ''
if b_flg_show_rot_save:
save_show = save_dir + 'show/'
if not os.path.exists(save_show):
os.makedirs(save_show)
list_img = os.listdir(root_img)
for cnt_img,img_name in enumerate(list_img):
print("cnt=%d,img_name=%s"%(cnt_img,img_name))
img_path = root_img + img_name
img = cv2.imread(img_path)
pix_border = get_background(img)
txt_name = img_name.replace('.jpg','.txt')
txt_path = root_pt_txt + txt_name
vv_pt = get_pt(txt_path)
for cnt in range(0,15):
ang = random.randint(10,350)
if 0 == cnt:
ang = 90
elif 1 == cnt:
ang = 180
elif 2 == cnt:
ang = 270
print("ang=%d"%(ang))
m_rot, vv_pt_rot = rotation_point(img,pix_border, ang, vv_pt)
name_img_rot = img_name.replace('.jpg','_'+str(ang)+'.jpg')
name_txt_rot = name_img_rot.replace('.jpg','.txt')
save_img_path = save_img + name_img_rot
save_txt_path = save_txt + name_txt_rot
cv2.imwrite(save_img_path,m_rot)
write_pt(save_txt_path, vv_pt_rot)
if b_flg_show_rot_save:
show_debug(img, vv_pt, m_rot, vv_pt_rot, save_show + name_img_rot, cnt,b_flg_show_rot_save)20190809 增加随机角度相隔T,不要太靠近,因为发现一开始有的角度就相差1°,想多点儿大角度
import os
import cv2
import math
import random
import numpy as np
def get_background(srcimg):
gray = cv2.cvtColor(srcimg,cv2.COLOR_BGR2GRAY)
hest = np.zeros([256],dtype=np.int32)
hs = gray.shape[0]
ws = gray.shape[1]
for h in range(0,hs):
for w in range(0,ws):
pix = gray[h,w]
hest[pix] += 1
idx = np.where(hest == np.max(hest))
idxx = idx[0][0]
for h in range(0,hs):
for w in range(0,ws):
pix = gray[h,w]
if idxx == pix:
return (int(srcimg[h,w,0]),int(srcimg[h,w,1]),int(srcimg[h,w,2]))
def rotation_point(img, pix_border,angle=15, points=None):
cols = img.shape[1]
rows = img.shape[0]
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), angle, 1)
heightNew = int(cols * math.fabs(math.sin(math.radians(angle))) + rows * math.fabs(math.cos(math.radians(angle))))
widthNew = int(rows * math.fabs(math.sin(math.radians(angle))) + cols * math.fabs(math.cos(math.radians(angle))))
M[0, 2] += (widthNew - cols) / 2
M[1, 2] += (heightNew - rows) / 2
img = cv2.warpAffine(img, M, (widthNew, heightNew),borderValue=pix_border)
a = M[:, :2] ##a.shape (2,2)
b = M[:, 2:] ###b.shape(2,1)
b = np.reshape(b, newshape=(1, 2))
a = np.transpose(a)
v_pt = []
for point in points:
len_1 = len(point)
point = np.reshape(point, newshape=(len_1, 2)) # point = np.reshape(point, newshape=(len(point) * 4, 2))
point = np.dot(point, a) + b
point = np.reshape(point, newshape=(len_1, 2))
point = point.astype(int)
v_pt.append(point)
return img, v_pt
def get_pt(txt_path):
vv_pt_new = []
with open(txt_path,'r') as fr:
txt_line = fr.readlines()
for line in txt_line:
line = line.strip()
pts = line.split(',')
vv_pt = []
len_pts = len(pts)
for i in range(0,int(len_pts),2):
v_pt = []
x = pts[i]
y = pts[i + 1]
v_pt.append(int(x))
v_pt.append(int(y))
vv_pt.append(v_pt)
vv_pt_new.append(vv_pt)
return vv_pt_new
def write_pt(txt_path,vv_pt_rot):
with open(txt_path,'a')as fw:
for pts in vv_pt_rot:
for i,pt in enumerate(pts):
x = pt[0]
y = pt[1]
fw.write(str(x))
fw.write(',')
fw.write(str(y))
if i != len(pts)-1:
fw.write(',')
else:
fw.write('\n')
def show_debug(img_,vv_pt,m_rot,vv_pt_rot,path_show,cnt,b_show_save=False):
img = img_.copy()
for val in vv_pt:
val = np.reshape(val,newshape=(len(val),2))
val = val.astype(int)
cv2.polylines(img, [val], True, (255, 0, 255), 5)
for val in vv_pt_rot:
cv2.polylines(m_rot, [val], True, (0, 255, 255), 5)
if b_show_save:
cv2.imwrite(path_show,m_rot)
if 0 == cnt:
cv2.imwrite(path_show.replace('.jpg','_src_.jpg'),img)
if False:
cv2.namedWindow('src',0)
cv2.imshow('src',img)
cv2.namedWindow('m_rot',0)
cv2.imshow('m_rot',m_rot)
cv2.waitKey(0)
def get_ang(ang_num = 18):
ang = [90,180,270]
T = 8
while len(ang) < ang_num:
flg = False
while not flg:
ang_random = random.randint(3, 355)
for i,val in enumerate(ang):
diff = abs(ang_random - val)
if diff <= T:
break
if i == len(ang)-1 and diff > T:
flg = True
ang.append(ang_random)
return ang
def get_ang_1(ang_num=15):
ang = [90, 180, 270]
T = 20
while len(ang) <= ang_num:
flg = False
while not flg:
ang_random = random.randint(3, 355)
for i, val in enumerate(ang):
diff = abs(ang_random - val)
if diff <= T:
flg = True
break
if not flg:
ang.append(ang_random)
return ang
b_flg_show_rot_save = True
root_img = "/media/data_2/everyday/0809/ctd/mark/"
root_pt_txt = "/media/data_2/everyday/0809/ctd/ctd2general/"
save_dir = os.path.dirname(os.path.dirname(root_img)) + '/rot/'
if not os.path.exists(save_dir):
os.makedirs(save_dir)
save_txt = save_dir + 'txt/'
save_img = save_dir + 'm_rot/'
if not os.path.exists(save_txt):
os.makedirs(save_txt)
if not os.path.exists(save_img):
os.makedirs(save_img)
save_show = ''
if b_flg_show_rot_save:
save_show = save_dir + 'show/'
if not os.path.exists(save_show):
os.makedirs(save_show)
list_img = os.listdir(root_img)
for cnt_img,img_name in enumerate(list_img):
v_ang = get_ang()
print("cnt=%d,img_name=%s"%(cnt_img,img_name))
img_path = root_img + img_name
img = cv2.imread(img_path)
pix_border = get_background(img)
txt_name = img_name.replace('.jpg','.txt')
txt_path = root_pt_txt + txt_name
vv_pt = get_pt(txt_path)
for cnt,ang in enumerate(v_ang):
print("ang=%d" % (ang))
m_rot, vv_pt_rot = rotation_point(img,pix_border, ang, vv_pt)
name_img_rot = img_name.replace('.jpg','_'+str(ang)+'.jpg')
name_txt_rot = name_img_rot.replace('.jpg','.txt')
save_img_path = save_img + name_img_rot
save_txt_path = save_txt + name_txt_rot
cv2.imwrite(save_img_path,m_rot)
write_pt(save_txt_path, vv_pt_rot)
if b_flg_show_rot_save:
show_debug(img, vv_pt, m_rot, vv_pt_rot, save_show + name_img_rot, cnt,b_flg_show_rot_save)