CRI - Container Runtime Interface(容器运行时接口)
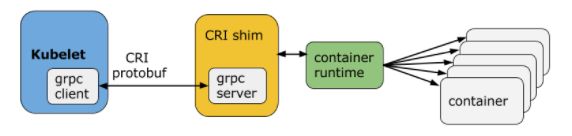
CRI中定义了容器和镜像的服务的接口,因为容器运行时与镜像的生命周期是彼此隔离的,因此需要定义两个服务,该接口使用Protocol Buffer,基于gRPC。
Container Runtime实现了CRI gRPC Server,包括RuntimeService和ImageService。该gRPC Server需要监听本地的Unix socket,而kubelet则作为gRPC Client运行
启用CRI
除非集成了rktnetes,否则CRI都是被默认启用了,kubernetes1.7版本开始旧的预集成的docker CRI已经被移除。
要想启用CRI只需要在kubelet的启动参数重传入此参数:--container-runtime-endpoint远程运行时服务的端点。当前Linux上支持unix socket,windows上支持tcp。例如:unix:///var/run/dockershim.sock(socket)、 tcp://localhost:373(tcp),默认是unix:///var/run/dockershim.sock,即默认使用本地的docker作为容器运行时.
配置实例:如使用cri-containerd作为CRI接口,使用kubeadm安装集群,10-kubelet.onf改动配置如下:
Environment="KUBELET_EXTRA_ARGS=--container-runtime=remote --runtime-request-timeout=15m --container-runtime-endpoint=unix:///run/containerd/containerd.sock"
接口定义
// Runtime service defines the public APIs for remote container runtimes
service RuntimeService {
// Version returns the runtime name, runtime version, and runtime API version.
rpc Version(VersionRequest) returns (VersionResponse) {}
// RunPodSandbox creates and starts a pod-level sandbox. Runtimes must ensure
// the sandbox is in the ready state on success.
rpc RunPodSandbox(RunPodSandboxRequest) returns (RunPodSandboxResponse) {}
// StopPodSandbox stops any running process that is part of the sandbox and
// reclaims network resources (e.g., IP addresses) allocated to the sandbox.
// If there are any running containers in the sandbox, they must be forcibly
// terminated.
// This call is idempotent, and must not return an error if all relevant
// resources have already been reclaimed. kubelet will call StopPodSandbox
// at least once before calling RemovePodSandbox. It will also attempt to
// reclaim resources eagerly, as soon as a sandbox is not needed. Hence,
// multiple StopPodSandbox calls are expected.
rpc StopPodSandbox(StopPodSandboxRequest) returns (StopPodSandboxResponse) {}
// RemovePodSandbox removes the sandbox. If there are any running containers
// in the sandbox, they must be forcibly terminated and removed.
// This call is idempotent, and must not return an error if the sandbox has
// already been removed.
rpc RemovePodSandbox(RemovePodSandboxRequest) returns (RemovePodSandboxResponse) {}
// PodSandboxStatus returns the status of the PodSandbox. If the PodSandbox is not
// present, returns an error.
rpc PodSandboxStatus(PodSandboxStatusRequest) returns (PodSandboxStatusResponse) {}
// ListPodSandbox returns a list of PodSandboxes.
rpc ListPodSandbox(ListPodSandboxRequest) returns (ListPodSandboxResponse) {}
// CreateContainer creates a new container in specified PodSandbox
rpc CreateContainer(CreateContainerRequest) returns (CreateContainerResponse) {}
// StartContainer starts the container.
rpc StartContainer(StartContainerRequest) returns (StartContainerResponse) {}
// StopContainer stops a running container with a grace period (i.e., timeout).
// This call is idempotent, and must not return an error if the container has
// already been stopped.
// TODO: what must the runtime do after the grace period is reached?
rpc StopContainer(StopContainerRequest) returns (StopContainerResponse) {}
// RemoveContainer removes the container. If the container is running, the
// container must be forcibly removed.
// This call is idempotent, and must not return an error if the container has
// already been removed.
rpc RemoveContainer(RemoveContainerRequest) returns (RemoveContainerResponse) {}
// ListContainers lists all containers by filters.
rpc ListContainers(ListContainersRequest) returns (ListContainersResponse) {}
// ContainerStatus returns status of the container. If the container is not
// present, returns an error.
rpc ContainerStatus(ContainerStatusRequest) returns (ContainerStatusResponse) {}
// UpdateContainerResources updates ContainerConfig of the container.
rpc UpdateContainerResources(UpdateContainerResourcesRequest) returns (UpdateContainerResourcesResponse) {}
// ExecSync runs a command in a container synchronously.
rpc ExecSync(ExecSyncRequest) returns (ExecSyncResponse) {}
// Exec prepares a streaming endpoint to execute a command in the container.
rpc Exec(ExecRequest) returns (ExecResponse) {}
// Attach prepares a streaming endpoint to attach to a running container.
rpc Attach(AttachRequest) returns (AttachResponse) {}
// PortForward prepares a streaming endpoint to forward ports from a PodSandbox.
rpc PortForward(PortForwardRequest) returns (PortForwardResponse) {}
// ContainerStats returns stats of the container. If the container does not
// exist, the call returns an error.
rpc ContainerStats(ContainerStatsRequest) returns (ContainerStatsResponse) {}
// ListContainerStats returns stats of all running containers.
rpc ListContainerStats(ListContainerStatsRequest) returns (ListContainerStatsResponse) {}
// UpdateRuntimeConfig updates the runtime configuration based on the given request.
rpc UpdateRuntimeConfig(UpdateRuntimeConfigRequest) returns (UpdateRuntimeConfigResponse) {}
// Status returns the status of the runtime.
rpc Status(StatusRequest) returns (StatusResponse) {}
}
// ImageService defines the public APIs for managing images.
service ImageService {
// ListImages lists existing images.
rpc ListImages(ListImagesRequest) returns (ListImagesResponse) {}
// ImageStatus returns the status of the image. If the image is not
// present, returns a response with ImageStatusResponse.Image set to
// nil.
rpc ImageStatus(ImageStatusRequest) returns (ImageStatusResponse) {}
// PullImage pulls an image with authentication config.
rpc PullImage(PullImageRequest) returns (PullImageResponse) {}
// RemoveImage removes the image.
// This call is idempotent, and must not return an error if the image has
// already been removed.
rpc RemoveImage(RemoveImageRequest) returns (RemoveImageResponse) {}
// ImageFSInfo returns information of the filesystem that is used to store images.
rpc ImageFsInfo(ImageFsInfoRequest) returns (ImageFsInfoResponse) {}
}
这其中包含了两个gRPC服务:
- RuntimeService:容器和Sandbox运行时管理
- ImageService:提供了从镜像仓库拉取、查看、和移除镜像的RPC。
CNI - Container Network Interface(容器网络接口)
CNI(Container Network Interface) 是 google 和 CoreOS 主导制定的容器网络标准,它本身并不是实现或者代码,可以理解成一个协议。这个标准是在 rkt 网络提议的基础上发展起来的,综合考虑了灵活性、扩展性、ip 分配、多网卡等因素.
这个协议连接了两个组件:容器管理系统和网络插件。它们之间通过 JSON 格式的文件进行通信,实现容器的网络功能。具体的事情都是插件来实现的,包括:创建容器网络空间(network namespace)、把网络接口(interface)放到对应的网络空间、给网络接口分配 IP 等等
接口定义
type CNI interface {
AddNetworkList(net *NetworkConfigList, rt *RuntimeConf) (types.Result, error)
DelNetworkList(net *NetworkConfigList, rt *RuntimeConf) error
AddNetwork(net *NetworkConfig, rt *RuntimeConf) (types.Result, error)
DelNetwork(net *NetworkConfig, rt *RuntimeConf) error
}
该接口只有四个方法,添加网络、删除网络、添加网络列表、删除网络列表。
设计考量
CNI设计的时候考虑了以下问题:
- 容器运行时必须在调用任何插件之前为容器创建一个新的网络命名空间。
- 运行时必须确定这个容器应属于哪个网络,并为每个网络确定哪些插件必须被执行。
- 网络配置采用JSON格式,可以很容易地存储在文件中。网络配置包括必填字段,如name和type以及插件(类型)。网络配置允许字段在调用之间改变值。为此,有一个可选的字段args,必须包含不同的信息。
- 容器运行时必须按顺序为每个网络执行相应的插件,将容器添加到每个网络中。
- 在完成容器生命周期后,运行时必须以相反的顺序执行插件(相对于执行添加容器的顺序)以将容器与网络断开连接。
- 容器运行时不能为同一容器调用并行操作,但可以为不同的容器调用并行操作。
- 容器运行时必须为容器订阅ADD和DEL操作,这样ADD后面总是跟着相应的DEL。 DEL可能跟着额外的DEL,但是,插件应该允许处理多个DEL(即插件DEL应该是幂等的)。
- 容器必须由ContainerID唯一标识。存储状态的插件应该使用(网络名称,容器ID)的主键来完成。
- 运行时不能调用同一个网络名称或容器ID执行两次ADD(没有相应的DEL)。换句话说,给定的容器ID必须只能添加到特定的网络一次。
CNI插件
CNI插件必须实现一个可执行文件,这个文件可以被容器管理系统(例如rkt或Kubernetes)调用。
CNI插件负责将网络接口插入容器网络命名空间(例如,veth对的一端),并在主机上进行任何必要的改变(例如将veth的另一端连接到网桥)。然后将IP分配给接口,并通过调用适当的IPAM插件来设置与“IP地址管理”部分一致的路由。
CNI插件必须实现容器网络添加,容器网络删除,IP分配等功能
可用插件
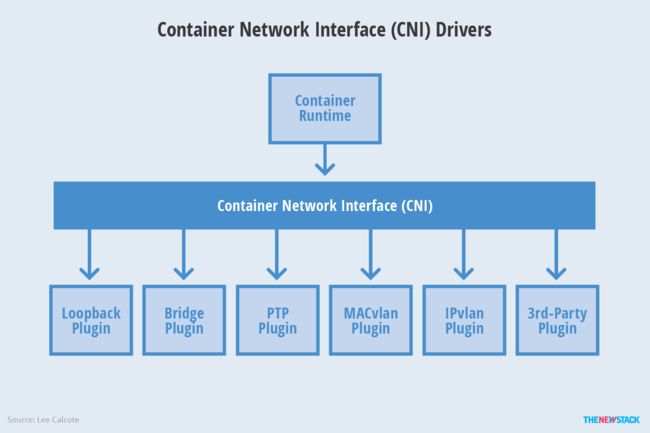
Main:接口创建
- bridge:创建网桥,并添加主机和容器到该网桥
- ipvlan:在容器中添加一个ipvlan接口
- loopback:创建一个回环接口
- macvlan:创建一个新的MAC地址,将所有的流量转发到容器
- ptp:创建veth对
- vlan:分配一个vlan设备
IPAM:IP地址分配
- dhcp:在主机上运行守护程序,代表容器发出DHCP请求
- host-local:维护分配IP的本地数据库
Meta:其它插件
- flannel:根据flannel的配置文件创建接口
- tuning:调整现有接口的sysctl参数
- portmap:一个基于iptables的portmapping插件。将端口从主机的地址空间映射到容器。
OCI - Open Container Initiative
Linux基金会于2015年6月成立OCI(Open Container Initiative)组织,旨在围绕容器格式和运行时制定一个开放的工业化标准,目前主要有两个标准文档:容器运行时标准 (runtime spec)和 容器镜像标准(image spec)
制定容器格式标准的宗旨概括来说就是不受上层结构的绑定,如特定的客户端、编排栈等,同时也不受特定的供应商或项目的绑定,即不限于某种特定操作系统、硬件、CPU架构、公有云等。
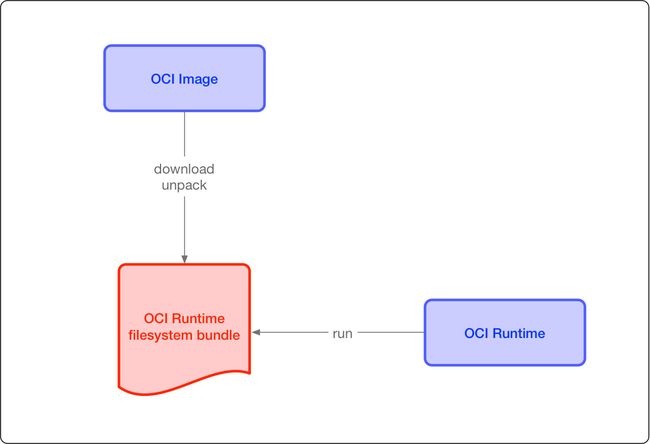
这两个协议通过 OCI runtime filesytem bundle 的标准格式连接在一起,OCI 镜像可以通过工具转换成 bundle,然后 OCI 容器引擎能够识别这个 bundle 来运行容器
设计考量
- 操作标准化:容器的标准化操作包括使用标准容器创建、启动、停止容器,使用标准文件系统工具复制和创建容器快照,使用标准化网络工具进行下载和上传。
- 内容无关:内容无关指不管针对的具体容器内容是什么,容器标准操作执行后都能产生同样的效果。如容器可以用同样的方式上传、启动,不管是PHP应用还是MySQL数据库服务。
- 基础设施无关:无论是个人的笔记本电脑还是AWS S3,亦或是OpenStack,或者其它基础设施,都应该对支持容器的各项操作。
- 为自动化量身定制:制定容器统一标准,是的操作内容无关化、平台无关化的根本目的之一,就是为了可以使容器操作全平台自动化。
- 工业级交付:制定容器标准一大目标,就是使软件分发可以达到工业级交付成为现实
image spec(容器标准包)
OCI 容器镜像主要包括几块内容:
- 文件系统:以 layer 保存的文件系统,每个 layer 保存了和上层之间变化的部分,layer 应该保存哪些文件,怎么表示增加、修改和删除的文件等
- config 文件:保存了文件系统的层级信息(每个层级的 hash 值,以及历史信息),以及容器运行时需要的一些信息(比如环境变量、工作目录、命令参数、mount 列表),指定了镜像在某个特定平台和系统的配置。比较接近我们使用 docker inspect
看到的内容 - manifest 文件:镜像的 config 文件索引,有哪些 layer,额外的 annotation 信息,manifest 文件中保存了很多和当前平台有关的信息
- index 文件:可选的文件,指向不同平台的 manifest 文件,这个文件能保证一个镜像可以跨平台使用,每个平台拥有不同的 manifest 文件,使用 index 作为索引
runtime spec(容器运行时和生命周期)
容器运行时
容器标准格式也要求容器把自身运行时的状态持久化到磁盘中,这样便于外部的其它工具对此信息使用和演绎。该运行时状态以JSON格式编码存储。推荐把运行时状态的JSON文件存储在临时文件系统中以便系统重启后会自动移除。
基于Linux内核的操作系统,该信息应该统一地存储在/run/opencontainer/containers目录,该目录结构下以容器ID命名的文件夹(/run/opencontainer/containers/
state.json文件中包含的具体信息需要有:
- 版本信息:存放OCI标准的具体版本号。
- 容器ID:通常是一个哈希值,也可以是一个易读的字符串。在state.json文件中加入容器ID是为了便于之前提到的运行时hooks只需载入state.json就- - 可以定位到容器,然后检测state.json,发现文件不见了就认为容器关停,再执行相应预定义的脚本操作。
- PID:容器中运行的首个进程在宿主机上的进程号。
- 容器文件目录:存放容器rootfs及相应配置的目录。外部程序只需读取state.json就可以定位到宿主机上的容器文件目录。
- 容器创建:创建包括文件系统、namespaces、cgroups、用户权限在内的各项内容。
- 容器进程的启动:运行容器进程,进程的可执行文件定义在的config.json中,args项。
- 容器暂停:容器实际上作为进程可以被外部程序关停(kill),然后容器标准规范应该包含对容器暂停信号的捕获,并做相应资源回收的处理,避免孤儿进程的出现。
容器生命周期
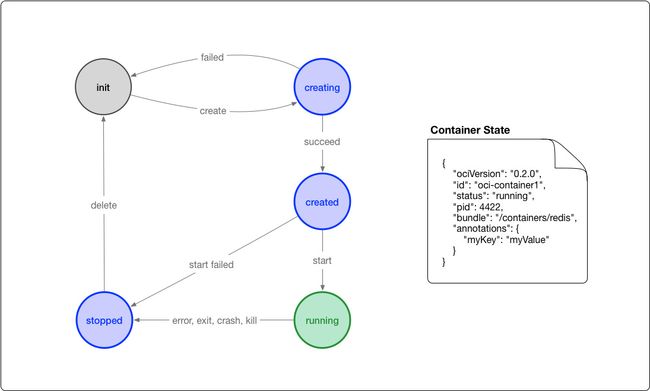
- init 状态:这个是我自己添加的状态,并不在标准中,表示没有容器存在的初始状态
- creating:使用 create 命令创建容器,这个过程称为创建中。创建包括文件系统、namespaces、cgroups、用户权限在内的各项内容,
- created:容器创建出来,但是还没有运行,表示镜像和配置没有错误,容器能够运行在当前平台。进程的可执行文件定义在的config.json中,args项
- running:容器的运行状态,里面的进程处于 up 状态,正在执行用户设定的任务
- stopped:容器运行完成,或者运行出错,或者 stop 命令之后,容器处于暂停状态。这个状态,容器还有很多信息保存在平台中,并没有完全被删除
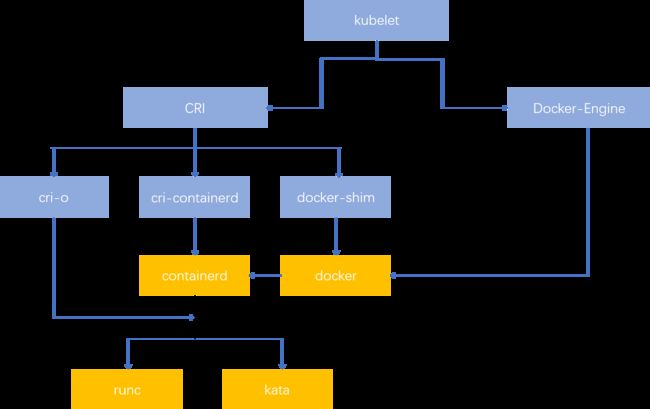
CRI OCI区别
Open Container Initiative,也就是常说的OCI,是由多家公司共同成立的项目,并由linux基金会进行管理,致力于container runtime的标准的制定和runc的开发等工作。所谓container runtime,主要负责的是容器的生命周期的管理。oci的runtime spec标准中对于容器的状态描述,以及对于容器的创建、删除、查看等操作进行了定义。
在k8s 1.5版本之后,kubernetes推出了自己的运行时接口api–CRI(container runtime interface)。cri接口的推出,隔离了各个容器引擎之间的差异,而通过统一的接口与各个容器引擎之间进行互动。
与oci不同,cri与kubernetes的概念更加贴合,并紧密绑定。cri不仅定义了容器的生命周期的管理,还引入了k8s中pod的概念,并定义了管理pod的生命周期。在kubernetes中,pod是由一组进行了资源限制的,在隔离环境中的容器组成。而这个隔离环境,称之为PodSandbox。在cri开始之初,主要是支持docker和rkt两种。其中kubelet是通过cri接口,调用docker-shim,并进一步调用docker api实现的。
后来,docker独立出来了containerd,kubernetes也顺应潮流,孵化了cri-containerd项目,用以将containerd接入到cri的标准中。
为了进一步与oci进行兼容,kubernetes还孵化了cri-o,成为了架设在cri和oci之间的一座桥梁。通过这种方式,可以方便更多符合oci标准的容器运行时,接入kubernetes进行集成使用。可以预见到,通过cri-o,kubernetes在使用的兼容性和广泛性上将会得到进一步加强
一张图说明一切咯!!!!!
see also:
http://http://dockone.io/article/776
https://jimmysong.io/kubernetes-handbook/concepts/cri.html
https://github.com/containerd
https://github.com/kata-containers