百度Apollo升级发布15大新品,还要化身无人车基建狂魔
郭一璞 发自 长沙梅溪湖畔
量子位 报道 公众号 QbitAI
百度 Apollo,今天交出了一份亮眼的成绩单。
在首届 Apollo 生态大会上,百度智能驾驶事业群组总经理李震宇宣布,Apollo 目前总路测里程超过了 300 万公里,路测牌照超过 150 张,而且已经有了 177 家合作伙伴。
而这场大会的举办地长沙,正是其中的标杆之地,在我国庞大市场、政策环境和基建能力的背景上,借助车路协同的技术路径,还有城市、科技公司、车企三位一体的合作路径,长沙政府提供公共资源、百度提供自动驾驶技术和生态、红旗负责整车设计,三方合力走出了一条中国特色的自动驾驶之路。

或许未来,车路协同的自动驾驶会像此前的高铁技术一样,成为“基建狂魔”式对外输出技术的中国利器。
因此,正是在长沙,百度正式将 Apollo 自动驾驶开放平台扩展为三个部分:
- 自动驾驶开放平台
- 车路协同开放平台
- 智能车联开放平台
有了三大平台的帮助,开发者可以用最近更新的 Apollo 5.5 DIY 自己的城市自动驾驶车辆,百度的企业级合作伙伴们也有面向不同场景的多套自动驾驶软硬一体套件、自动驾驶云、高精地图可以直接用,而最终服务的用户将来也能在车里直接召唤小度提供服务。
自动驾驶开放平台
百度 Apollo 平台研发总经理王京傲展示,目前,Apollo 开源代码量超过了 56 万行,已经有来自全球 97 个国家的 36000 名开发者在借助 Apollo 进行开发,这个数字是 2018 年的 2.4 倍,Apollo 连续两年蝉联全球最大自动驾驶开发者社区。
另外,今年百度申请自动驾驶专利达 1237 项,目前专利数排名中国第一。
而今天发布的 Apollo 5.5 版本,实现了点到点城市自动驾驶。
其中主要做了三大技术创新:
语义地图,投喂给神经网络的更优质数据
语义地图,就是给高精地图加上交通规则、车辆信息等语义,然后生成图片投喂给 CNN,使其能够理解复杂路况,从而应用于包括感知、预测在内的多个模块中。
比如这三张图:
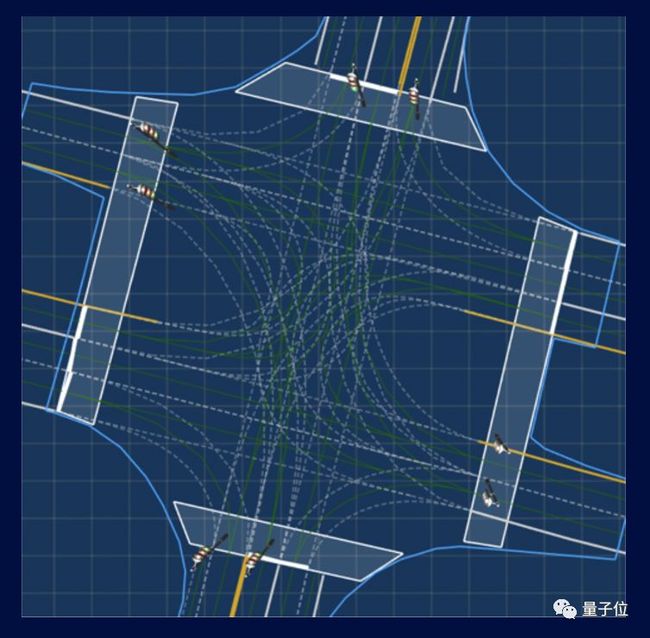
第一张是原本的高精地图;

第二张加了用颜色表示的道路信息,不同颜色代表着不同的车辆行进方向,渐变线条就是车辆改变行驶方向;
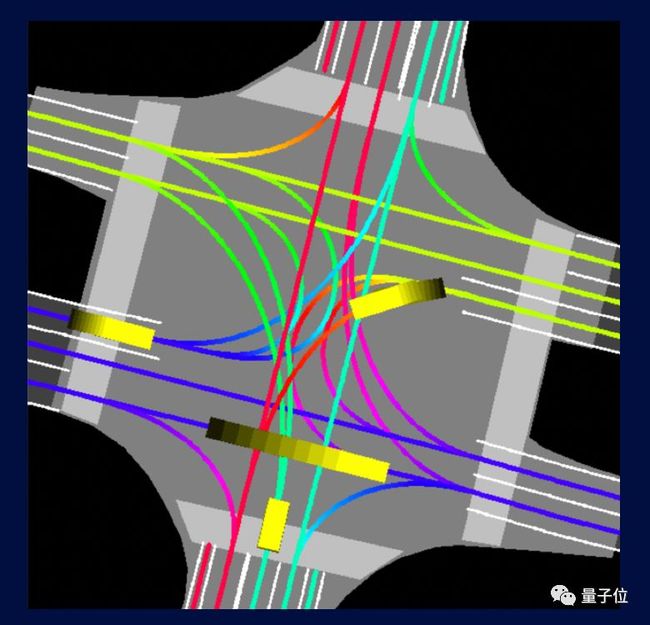
第三张上的黄灰渐变色块则是路上的障碍物,每秒一个黄色小格子,时间越靠后的障碍物位置颜色越黄越亮,时间越早的障碍物位置颜色越灰,像拖着尾巴的彗星一样展示了马路上的车辆和行人动态信息。
这样一张地图并不是给人看的,而是用于模型训练的数据。将语义地图投喂给 CNN 进行训练后,模型预测 3 秒钟内轨迹点的平均误差比之前降低了 30%,达到了 0.8 米之内,这也是业内的最好水平,这样自动驾驶系统行车也就更安全了。
王京傲介绍说,这项技术的原理来自 CVPR 上的一篇论文,百度是第一家将其实际落地的企业。
速度规划,像老司机一样把车开得稳稳地
除了安全,舒适也是重要的考量。
人类的新司机就总会遇到各种刹车颠簸的情况,但经验丰富的老司机们却可以开得又快又稳。
Apollo 5.5 这次就做了大量的数学优化,用非线性的速度优化器保证在同样的平均速度下,车辆行驶更平稳,乘客的舒适度提升了 15%。
也就是说,如果你打一辆 Apollo 的自动驾驶车,不用担心“师傅”开得稳不稳,会不会制造大量刹车急转弯让你晕头转向,因为 AI 自己学会了像老司机一样稳稳的开车。
控制器升级,让车辆更清晰的知道自己处在哪个位置
此外,还有模型参考自适应控制(MRAC)双循环控制器,主要用来保证让系统清晰明确的知道自己处在哪条车道上,对横向的左右位置有一个清晰的认知。

它要解决的问题来自车辆频繁的左右变道,实验室环境下会默认控制模块发出的变道命令被完美执行,而在实际行驶中,车辆的执行器因车而异,控制器以为自己的命令被完美执行了,殊不知作为“高层”,控制器想得很美,而作为“底层”的执行器却各有各的做法,出现了偏差。
而模型参考自适应控制(MRAC)双循环控制器就是在原来的基础上增加了参考模型、MRAC 适配规则和 MRAC 反馈控制器三个模块,把原来单个的闭环变成了双循环,让作为“高层”的控制器多了一只眼睛来盯着“底层”执行器,让自动驾驶系统实现“上下一心”,清晰明确的知道整台车辆处在哪条车道上,偏左还是偏右。
最终,这处改进让连续弯道横向精度提升了 60%,普通道路横向精度提升了 15%。
此外,还有解决变成复杂、配置复杂、监控复杂三个问题的新架构Apollo LEGO,以及解决传感器标定和深度学习模型训练问题的全新数据流水线感知服务。
面向企业客户的 Apollo 平台
除了面向开发者的 Apollo 5.5,这次生态大会上还提供了多项面向企业的服务和解决方案。
比如为 OEM 合作伙伴打造Apollo 高精地图,目前百度已经在这一市场上获得了超过 70% 的订单。
还有全新推出的Apollo 自动驾驶云。作为针对 OEM 厂商的自动驾驶研发和大规模落地的端云一体解决方案,Apollo 自动驾驶云涵盖了从车端动态采集,边缘筛选传输,到数据挖掘和规模仿真测试,直至规模化部署和车队管理在内的全流程服务。
Apollo 低成本低速自动驾驶方案,针对景区漫游、自动清扫、快递配送等低速场景,基于 ARM 构架,将打造自动驾驶的硬件成本降低 60% ,研发时间缩短 50%,门槛更低。
Apollo 自主泊车方案,借助 Xilinx 的 FPGA 芯片 ZU5,针对家庭公司等私人场景和商场等公共场景分别打造不同的自主泊车方案。目前,百度已经和威马汽车合作出产了第一批搭载自主泊车功能的自动驾驶车辆,最早明年就能量产。
Apollo Minibus 2.0 方案,王京傲在发布会上说,Minibus 2.0 为城市 BRT 量身打造,比普通公交车行驶更平稳,实现最高时速 60 公里每小时,载客 44 人,金龙客车、宇通客车等企业都是该方案的客户。
Apollo RoboTaxi 自动驾驶方案,提供出行服务乘用车无人驾驶解决方案,也是 9 月份落地长沙的方案。
王京傲在现场说,这是中国首个 Robotaxi 自动驾驶套件,是目前市场上最全面、最先进、最符合中国市场、唯一经过无人出租车队试运营验证的自动驾驶套件。
整体来看,Apollo 的这次新升级选用了更为创新的技术,对自动驾驶技术的追求已不仅限于安全,更提升到了用户体验的高度。
而针对各种场景的解决方案也证明,百度自动驾驶技术已经日趋成熟,走向应用阶段。而且,在这个新阶段里,和很多针对细分场景的创业公司不同,家底厚的百度选择了大而全的方向。
车路协同开放平台
除了自动驾驶开放平台,本次新推出的两大平台之一就是车路协同开放平台。
百度智能驾驶事业群自动驾驶技术总监陶吉介绍说,Apollo 车路协同开放平台的特点是一个基础能力底座支撑多个应用场景。
车路协同的基础能力可以支持智能网联自动驾驶,实现障碍物检测、轨迹跟踪等功能。这是最高级别的基础能力底座支撑的应用场景,因为自动驾驶需要和它能力相匹配的路侧感知结果,陶吉博士举了个例子说,就好像大学生需要和大学生才有共同语言,大学生和知识水平不够的小学生是聊不到一块的。
智能网联辅助驾驶也是支持的,实现检测障碍、精准定位、自动判断盲区,检测事故、施工路段,提升驾驶安全。
而除了自动驾驶辅助驾驶之外,即使是在最简单的用户手动开车的场景下,车路协同也能发挥作用。
比如在堵车的时候,可以根据车流状况优化红绿灯,提高出行效率。
面临停车难的问题,车路协同平台支持智能停车功能,借助 AI 感知能力检测进入停车场的车辆,统计停车场车位信息,提升车位利用率,停车场运营成本更低,普通用户找车位也更加容易了。
而对于政府而言,管理出租车、大巴车等各类运营车辆总是一件麻烦的事情,借助车路协同平台也能够实现更好更自动化的监管,保障运营安全。
在这样的基础之上,居民出行的安全性和便捷性也得到了提升。
这些能力不仅可以服务 OEM 车厂,更可以服务政府以及其他合作伙伴。
因此,车路协同对于长沙这座中国智能驾驶第一城也有重大意义。

一年来,百度在长沙投入了超过 3000 人/天的驻场工作,实现了全球最大规模的 Robotaxi+ 车路协同应用场景,也助力长沙洽谈 50+ 家企业,12 家研究院落地。
陶吉说,百度预计这笔投入对长沙 GDP 有巨大的拉动效应,投入1:实际拉动3:未来辐射7。
而在 GDP 之外,车路协同也在解决拥堵、减少事故、优化停车难问题。陶吉说,车路协同系统已经让长沙的拥堵时间减少了 20%~30%。
车路协同是对整个交通出行系统的进一步提升,整合了道路信息也就让出行更加规模化、系统化、易调动、易管理,是走向未来的一大步。
智能车联开放平台
在车与路之外,乘客和车辆的交互也是重要的环节,因而也有了今天新推出的另一个新平台:智能车联开放平台。
借助这个平台,更高级别的语音助手小度可以轻松“上车”了。
百度车联网事业部总经理苏坦现场介绍,目前 Apollo 智能能车联平台已经于 60 多个品牌、400 多款车型达成合作,服务车主超过千万,2019 年累计行程 10 亿公里,用户可以通过小度控制 10000 个全语音交互小程序。
还能实现车载真人语音,只要用手机录 20 句话,20 分钟后,你或者你家人朋友的语音包就可以生成了,开车时听着爱人孩子的声音,也会让人感到一些温暖吧。
多轮语音交互也得以实现,只要喊一次唤醒词,就可以持续和语音助理对话。
而这些丰富的语音能力,都基于背后的车规级百度鸿鹄芯片,这款芯片使用 HiFi4 自定义指令集,双核 DSP 核心,平均功耗仅 100mW,语音识别、语音合成等多种能力都依托它来实现。目前,这款芯片已经搭载在了吉利的新车型上。
此外,AR 导航功能也进行了升级,这次,百度直接提出了车道级 AR 导航功能精确到亚米级,不仅能为车辆找到最佳路线,还能提醒违章、公交车占道等情形。
小度车载系统也升级到了 2020 版本,从支持端到端的解决方案小度车载 OS 扩展到提供可集成全场景服务的 DAS 解决方案,帮助合作伙伴提升研发能力,也提供了更多选择,提供了全面开放小度车载平台,其中的能力都可以支撑 OEM 进行定制开发和拓展。

苏坦也在发布会上立下豪言:“我们要让每一个 OEM 都能拥有属于自己的智能车联系统。”
那么如何才能实现呢?小度车载 2020 向开发者们开放了入口,让 OEM 拥有语音视觉场景等多维度的连接能力。
此外,还开放了内容的全面自定义,让 OEM 全面拥有自己的车联生态。
语音助手方面,唤醒词、合成的声音、造型,语义解析能力、场景推荐能力,都允许客户进行定制开发。
而地图方面,客户可以通过 API 和 SDK,以及云端配置平台,定制自己的地图图层样式、地图元素样式,定义自己的 POI 点并挂接自己的专属服务,实现如充电桩地图、4s 店地图等类型的定制地图。
甚至还可以让客户自定义自己的服务触发场景,并选择特定的服务以及展示模版,定向投放到特定人群。
而且,百度车联网即将加入车路协同能力,两大平台,融会贯通,这可能是未来最大规模的车路协同网络了。
此外,百度今天还推出了一款硬件:度小镜。
这款被称作“业界首款真正的拥有前装体验的后装智能硬件产品”,让存量车一键变成聪明的车,不仅能导航、实现高级辅助驾驶,还集成了海量的内容娱乐资源,用户可以直接召唤小度语音助手来进行操控。

可以说,包括这些所有产品和服务在内的智能车联开放平台是一套高度自定义的平台,不仅帮用户和车辆建立了交互平台,也为车厂、用户和各类第三方服务搭建了桥梁,相当与车内操作系统,是内容和服务所生长的土地。
面向正式运营
看清这三大平台,百度 Apollo 生态全景图也缓缓展开。很明显,Apollo 已经是中国自动驾驶界树大根深的玩家了。
技术上,已经不仅仅是解决一两个车辆行驶中问题,而是更面向场景,更落地,更工程化集约化的打包解决方案;
生态上,政府、车企、软硬件服务商、应用服务开发者已经形成了一整条链条,生态愈加完善;
目前,Apollo 在长沙还是试运营阶段,但从百度的行动来看,这一整个产业链上的所有人已经整装待发,等待那个“试”字的消失。
One more thing
当然,或许你可能也好奇,为啥首届 Apollo 生态大会选在湖南长沙开?
一方面自然是上沙对百度 Apollo 的支持,双方携手落地了中国第一个量产 L4 级无人驾驶出租项目。
另一方面,上沙对于技术产业落地、人才渴求,也在这次大会最开始有了直接表现。
长沙市委副书记朱健开场致辞中称:
长沙有历史文化底蕴、有山水风光、有交通枢纽地位、有高校人才聚集……
而且宜居。
连续 12 年获评为中国最具幸福感城市,经济总量 11003 亿的同时,房价始终保持在最合理的水平。
2018 年的房价每平方米不到 9000 元,江景房在 12000 左右。这就是给未来年轻人特别是新长沙人,也为各个企业会聚和集聚研发人才提供了最好的土壤。
所以这算是最好的招商引资呼吁了。
年轻人,自动驾驶走起?长沙走起?