一、说明
在第一个程序里面,我们只是将图像上下左右平移,使用的矩阵也只有两个参数。
但是在下面的两幅图像里,不仅要旋转,还有平移变换,所选取的变换模型也不一样。

参考图像 待配准图像
这个时候我们选取的变换也更改为了欧拉二维变换矩阵
二、程序构建
找到例程里面的ImageRegistration5.cxx,按照之前的方法构建工程
程序我贴在这里:
/*========================================================================= * * Copyright Insight Software Consortium * * Licensed under the Apache License, Version 2.0 (the "License"); * you may not use this file except in compliance with the License. * You may obtain a copy of the License at * * http://www.apache.org/licenses/LICENSE-2.0.txt * * Unless required by applicable law or agreed to in writing, software * distributed under the License is distributed on an "AS IS" BASIS, * WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. * See the License for the specific language governing permissions and * limitations under the License. * *=========================================================================*/ // Software Guide : BeginCommandLineArgs // INPUTS: {BrainProtonDensitySliceBorder20.png} // INPUTS: {BrainProtonDensitySliceRotated10.png} // OUTPUTS: {ImageRegistration5Output.png} // OUTPUTS: {ImageRegistration5DifferenceAfter.png} // OUTPUTS: {ImageRegistration5DifferenceBefore.png} // ARGUMENTS: 0.1 // Software Guide : EndCommandLineArgs // Software Guide : BeginCommandLineArgs // INPUTS: {BrainProtonDensitySliceBorder20.png} // INPUTS: {BrainProtonDensitySliceR10X13Y17.png} // OUTPUTS: {ImageRegistration5Output2.png} // OUTPUTS: {ImageRegistration5DifferenceAfter2.png} // OUTPUTS: {ImageRegistration5DifferenceBefore2.png} // ARGUMENTS: 1.0 // Software Guide : EndCommandLineArgs // Software Guide : BeginLatex // // This example illustrates the use of the \doxygen{Euler2DTransform} // for performing rigid registration in $2D$. The example code is for the // most part identical to that presented in Section // \ref{sec:IntroductionImageRegistration}. The main difference is the use // of the Euler2DTransform here instead of the // \doxygen{TranslationTransform}. // // \index{itk::Euler2DTransform} // // Software Guide : EndLatex #include "itkImageRegistrationMethodv4.h" #include "itkMeanSquaresImageToImageMetricv4.h" #include "itkRegularStepGradientDescentOptimizerv4.h" // Software Guide : BeginLatex // // In addition to the headers included in previous examples, the // following header must also be included. // // \index{itk::Euler2DTransform!header} // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet #include "itkEuler2DTransform.h" // Software Guide : EndCodeSnippet #include "itkImageFileReader.h" #include "itkImageFileWriter.h" #include "itkResampleImageFilter.h" #include "itkSubtractImageFilter.h" #include "itkRescaleIntensityImageFilter.h" #include "itkPNGImageIOFactory.h" // The following section of code implements a Command observer // that will monitor the evolution of the registration process. // #include "itkCommand.h" class CommandIterationUpdate : public itk::Command { public: using Self = CommandIterationUpdate; using Superclass = itk::Command; using Pointer = itk::SmartPointer; itkNewMacro(Self); protected: CommandIterationUpdate() = default; public: using OptimizerType = itk::RegularStepGradientDescentOptimizerv4<double>; using OptimizerPointer = const OptimizerType*; void Execute(itk::Object* caller, const itk::EventObject& event) override { Execute((const itk::Object*)caller, event); } void Execute(const itk::Object* object, const itk::EventObject& event) override { auto optimizer = static_cast (object); if (!itk::IterationEvent().CheckEvent(&event)) { return; } std::cout << optimizer->GetCurrentIteration() << " "; std::cout << optimizer->GetValue() << " "; std::cout << optimizer->GetCurrentPosition() << std::endl; } }; int main(int argc, char* argv[]) { if (argc < 4) { std::cerr << "Missing Parameters " << std::endl; std::cerr << "Usage: " << argv[0]; std::cerr << " fixedImageFile movingImageFile "; std::cerr << " outputImagefile [differenceAfterRegistration] "; std::cerr << " [differenceBeforeRegistration] "; std::cerr << " [initialStepLength] " << std::endl; return EXIT_FAILURE; } constexpr unsigned int Dimension = 2; using PixelType = float; using FixedImageType = itk::Image< PixelType, Dimension >; using MovingImageType = itk::Image< PixelType, Dimension >; // Software Guide : BeginLatex // // The transform type is instantiated using the code below. The only // template parameter for this class is the representation type of the // space coordinates. // // \index{itk::Euler2DTransform!Instantiation} // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet using TransformType = itk::Euler2DTransform< double >; // Software Guide : EndCodeSnippet using OptimizerType = itk::RegularStepGradientDescentOptimizerv4<double>; using MetricType = itk::MeanSquaresImageToImageMetricv4< FixedImageType, MovingImageType >; using RegistrationType = itk::ImageRegistrationMethodv4< FixedImageType, MovingImageType, TransformType >; MetricType::Pointer metric = MetricType::New(); OptimizerType::Pointer optimizer = OptimizerType::New(); RegistrationType::Pointer registration = RegistrationType::New(); registration->SetMetric(metric); registration->SetOptimizer(optimizer); // Software Guide : BeginLatex // // In the Hello World! example, we used Fixed/Moving initial transforms // to initialize the registration configuration. That approach was good to // get an intuition of the registration method, specifically when we aim to run // a multistage registration process, from which the output of each stage can // be used to initialize the next registration stage. // // To get a better underestanding of the registration process in // such situations, consider an example of 3 stages registration process // that is started using an initial moving transform ($\Gamma_{mi}$). // Multiple stages are handled by linking multiple instantiations of // the \doxygen{ImageRegistrationMethodv4} class. // Inside the registration filter of the first stage, the initial moving // transform is added to an internal composite transform along with an updatable // identity transform ($\Gamma_{u}$). Although the whole composite transform // is used for metric evaluation, only the $\Gamma_{u}$ is set to be updated // by the optimizer at each iteration. The $\Gamma_{u}$ will be considered as // the output transform of the current stage when the optimization process is // converged. This implies that the output of this stage does not include // the initialization parameters, so we need to concatenate the output and the // initialization transform into a composite transform to be considered as the // final transform of the first registration stage. // // $ T_{1}(x) = \Gamma_{mi}(\Gamma_{stage_1}(x) ) $ // // Consider that, as explained in section \ref{sec:FeaturesOfTheRegistrationFramework}, // the above transform is a mapping from the vitual domain (i.e. fixed image space, when no // fixed initial transform) to the moving image space. // // Then, the result transform of the first stage will be used as the initial moving // transform for the second stage of the registration process, and this approach goes on // until the last stage of the registration process. // // At the end of the registration process, the $\Gamma_{mi}$ and the outputs of each stage // can be concatenated into a final composite transform that is considered to be the final // output of the whole registration process. // // $I'_{m}(x) = I_{m}(\Gamma_{mi}(\Gamma_{stage_1}(\Gamma_{stage_2}(\Gamma_{stage_3}(x) ) ) ) )$ // // The above approach is especially useful if individual stages are characterized by // different types of transforms, e.g. when we run a rigid registration // process that is proceeded by an affine registration which is completed by a BSpline // registration at the end. // // // In addition to the above method, there is also a direct initialization method in which the // initial transform will be optimized directly. In this way the initial transform will be // modified during the registration process, so it can be used as the final transform when // the registration process is completed. This direct approach is conceptually close to // what was happening in ITKv3 registration. // // Using this method is very simple and efficient when we have only one level of // registration, which is the case in this example. // Also, a good application of this initialization method in a multi-stage scenario // is when two consequent stages have the same transform types, or at least the initial // parameters can easily be inferred from the result of the previous stage, such as when a // translation transform is followed by a rigid transform. // // The direct initialization approach is shown by the current example in which we try // to initialize the parameters of the optimizable transform ($\Gamma_{u}$) directly. // // For this purpose, first, the initial transform object is constructed below. // This transform will be initialized, and its initial parameters will be // used when the registration process starts. // // \index{itk::Euler2DTransform!New()} // \index{itk::Euler2DTransform!Pointer} // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet TransformType::Pointer initialTransform = TransformType::New(); // Software Guide : EndCodeSnippet using FixedImageReaderType = itk::ImageFileReader< FixedImageType >; using MovingImageReaderType = itk::ImageFileReader< MovingImageType >; FixedImageReaderType::Pointer fixedImageReader = FixedImageReaderType::New(); MovingImageReaderType::Pointer movingImageReader = MovingImageReaderType::New(); itk::PNGImageIOFactory::RegisterOneFactory(); // INPUTS: {BrainProtonDensitySliceBorder20.png} // INPUTS: {BrainProtonDensitySliceR10X13Y17.png} fixedImageReader->SetFileName("D:\\Files\\ITKFiles\\ITK_8_RigidRegistration\\Data\\BrainProtonDensitySliceBorder20.png"); movingImageReader->SetFileName("D:\\Files\\ITKFiles\\ITK_8_RigidRegistration\\Data\\BrainProtonDensitySliceR10X13Y17.png"); registration->SetFixedImage(fixedImageReader->GetOutput()); registration->SetMovingImage(movingImageReader->GetOutput()); // Software Guide : BeginLatex // // In this example, the input images are taken from readers. The code // below updates the readers in order to ensure that the image parameters // (size, origin and spacing) are valid when used to initialize the // transform. We intend to use the center of the fixed image as the // rotation center and then use the vector between the fixed image center // and the moving image center as the initial translation to be applied // after the rotation. // 将参考图像的中心作为旋转中心,然后使用参考图像与待配准图像的中心形成的向量作为初始化矩阵 // Software Guide : EndLatex // Software Guide : BeginCodeSnippet fixedImageReader->Update(); movingImageReader->Update(); // Software Guide : EndCodeSnippet using SpacingType = FixedImageType::SpacingType; using OriginType = FixedImageType::PointType; using RegionType = FixedImageType::RegionType; using SizeType = FixedImageType::SizeType; // Software Guide : BeginLatex // // The center of rotation is computed using the origin, size and spacing of // the fixed image. // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet FixedImageType::Pointer fixedImage = fixedImageReader->GetOutput(); const SpacingType fixedSpacing = fixedImage->GetSpacing(); const OriginType fixedOrigin = fixedImage->GetOrigin(); const RegionType fixedRegion = fixedImage->GetLargestPossibleRegion(); const SizeType fixedSize = fixedRegion.GetSize(); TransformType::InputPointType centerFixed; //参考图像中心 centerFixed[0] = fixedOrigin[0] + fixedSpacing[0] * fixedSize[0] / 2.0; centerFixed[1] = fixedOrigin[1] + fixedSpacing[1] * fixedSize[1] / 2.0; // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // 计算待配准图像的中心 // The center of the moving image is computed in a similar way. // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet MovingImageType::Pointer movingImage = movingImageReader->GetOutput(); const SpacingType movingSpacing = movingImage->GetSpacing(); const OriginType movingOrigin = movingImage->GetOrigin(); const RegionType movingRegion = movingImage->GetLargestPossibleRegion(); const SizeType movingSize = movingRegion.GetSize(); TransformType::InputPointType centerMoving; centerMoving[0] = movingOrigin[0] + movingSpacing[0] * movingSize[0] / 2.0; centerMoving[1] = movingOrigin[1] + movingSpacing[1] * movingSize[1] / 2.0; // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // // Then, we initialize the transform by // passing the center of the fixed image as the rotation center with the // \code{SetCenter()} method. Also, the translation is set as the vector // relating the center of the moving image to the center of the fixed // image. This last vector is passed with the method // \code{SetTranslation()}. // 设置参考图像的中心作为旋转中心,平移是被设为与两个图像中心相关的的向量 // Software Guide : EndLatex // Software Guide : BeginCodeSnippet initialTransform->SetCenter(centerFixed); initialTransform->SetTranslation(centerMoving - centerFixed); // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // // Let's finally initialize the rotation with a zero angle. // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet initialTransform->SetAngle(0.0); // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // 将矩阵传入配准方法 // Now the current parameters of the initial transform will be set // to a registration method, so they can be assigned to the $\Gamma_{u}$ directly. // Note that you should not confuse the following function with the // \code{SetMoving(Fixed)InitialTransform()} methods that were used in Hello World! example. // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet registration->SetInitialTransform(initialTransform); // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // 注意旋转与平移的单位比例是不一样的,一个是rad,一个是mm // 我们需要参数比例去定制学习速率,与平移有关的比例我们选的小, // 实际上有一个函数可以自适应估计参数比例,在这个章节:MultiStageRegistration // Keep in mind that the scale of units in rotation and translation is // quite different. For example, here we know that the first element of the // parameters array corresponds to the angle that is measured in radians, while // the other parameters correspond to the translations that are measured in millimeters, // so a naive application of gradient descent optimizer will not produce a smooth // change of parameters, because a similar change of $\delta$ // to each parameter will produce a different magnitude of impact on the transform. // As the result, we need ``parameter scales'' to customize the learning rate for // each parameter. We can take advantage of the scaling functionality provided // by the optimizers. // // In this example we use small factors in the scales associated with // translations. However, for the transforms with larger parameters // sets, it is not intuitive for a user to set the // scales. Fortunately, a framework for automated estimation of // parameter scales is provided by ITKv4 that will be discussed // later in the example of section \ref{sec:MultiStageRegistration}. // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet using OptimizerScalesType = OptimizerType::ScalesType; OptimizerScalesType optimizerScales( initialTransform->GetNumberOfParameters()); const double translationScale = 1.0 / 1000.0; optimizerScales[0] = 1.0; optimizerScales[1] = translationScale; optimizerScales[2] = translationScale; optimizer->SetScales(optimizerScales); // Software Guide : EndCodeSnippet // Software Guide : BeginLatex // 我们使用梯度下降优化器,设置松弛系数,学习速率,最小步长,迭代次数(后两个是停止条件)。 // Next we set the normal parameters of the optimization method. In this // case we are using an \doxygen{RegularStepGradientDescentOptimizerv4}. // Below, we define the optimization parameters like the relaxation factor, // learning rate (initial step length), minimal step length and number of // iterations. These last two act as stopping criteria for the optimization. // // \index{Regular\-Step\-Gradient\-Descent\-Optimizer!SetRelaxationFactor()} // \index{Regular\-Step\-Gradient\-Descent\-Optimizer!SetLearningRate()} // \index{Regular\-Step\-Gradient\-Descent\-Optimizer!SetMinimumStepLength()} // \index{Regular\-Step\-Gradient\-Descent\-Optimizer!SetNumberOfIterations()} // // Software Guide : EndLatex // Software Guide : BeginCodeSnippet double initialStepLength = 1.3;//0.1; // Software Guide : EndCodeSnippet if (argc > 6) { initialStepLength = std::stod(argv[6]); } // Software Guide : BeginCodeSnippet optimizer->SetRelaxationFactor(0.6); optimizer->SetLearningRate(initialStepLength); optimizer->SetMinimumStepLength(0.001); optimizer->SetNumberOfIterations(200); // Software Guide : EndCodeSnippet //optimizer->SetMaximumStepLength(1.3); // Create the Command observer and register it with the optimizer. // 将observer和optimizer连接起来 CommandIterationUpdate::Pointer observer = CommandIterationUpdate::New(); optimizer->AddObserver(itk::IterationEvent(), observer); // One level registration process without shrinking and smoothing. // 无缩小和光滑的一层配准 constexpr unsigned int numberOfLevels = 1; RegistrationType::ShrinkFactorsArrayType shrinkFactorsPerLevel; shrinkFactorsPerLevel.SetSize(1); shrinkFactorsPerLevel[0] = 1; RegistrationType::SmoothingSigmasArrayType smoothingSigmasPerLevel; smoothingSigmasPerLevel.SetSize(1); smoothingSigmasPerLevel[0] = 0; registration->SetNumberOfLevels(numberOfLevels); registration->SetSmoothingSigmasPerLevel(smoothingSigmasPerLevel); registration->SetShrinkFactorsPerLevel(shrinkFactorsPerLevel); try { registration->Update(); std::cout << "Optimizer stop condition: " << registration->GetOptimizer()->GetStopConditionDescription() << std::endl; } catch (itk::ExceptionObject& err) { std::cerr << "ExceptionObject caught !" << std::endl; std::cerr << err << std::endl; return EXIT_FAILURE; } const TransformType::ParametersType finalParameters = registration->GetOutput()->Get()->GetParameters(); const double finalAngle = finalParameters[0]; const double finalTranslationX = finalParameters[1]; const double finalTranslationY = finalParameters[2]; const double rotationCenterX = registration->GetOutput()->Get()->GetCenter()[0]; const double rotationCenterY = registration->GetOutput()->Get()->GetCenter()[1]; const unsigned int numberOfIterations = optimizer->GetCurrentIteration(); const double bestValue = optimizer->GetValue(); // Print out results // const double finalAngleInDegrees = finalAngle * 180.0 / itk::Math::pi; std::cout << "Result = " << std::endl; std::cout << " Angle (radians) = " << finalAngle << std::endl; std::cout << " Angle (degrees) = " << finalAngleInDegrees << std::endl; std::cout << " Translation X = " << finalTranslationX << std::endl; std::cout << " Translation Y = " << finalTranslationY << std::endl; std::cout << " Fixed Center X = " << rotationCenterX << std::endl; std::cout << " Fixed Center Y = " << rotationCenterY << std::endl; std::cout << " Iterations = " << numberOfIterations << std::endl; std::cout << " Metric value = " << bestValue << std::endl; // Software Guide : BeginLatex // // Let's execute this example over two of the images provided in // \code{Examples/Data}: // // \begin{itemize} // \item \code{BrainProtonDensitySliceBorder20.png} // \item \code{BrainProtonDensitySliceRotated10.png} // \end{itemize} // // The second image is the result of intentionally rotating the first image // by $10$ degrees around the geometrical center of the image. Both images // have unit-spacing and are shown in Figure // \ref{fig:FixedMovingImageRegistration5}. The registration takes $17$ // iterations and produces the results: // // \begin{center} // \begin{verbatim} // [0.177612, 0.00681015, 0.00396471]//第一个是弧度制的角度,第二个是mm // \end{verbatim} // \end{center} // // These results are interpreted as // // \begin{itemize} // \item Angle = $0.177612$ radians // \item Translation = $( 0.00681015, 0.00396471 )$ millimeters // \end{itemize} // // As expected, these values match the misalignment intentionally introduced // into the moving image quite well, since $10$ degrees is about $0.174532$ // radians. // // \begin{figure} // \center // \includegraphics[width=0.44\textwidth]{BrainProtonDensitySliceBorder20} // \includegraphics[width=0.44\textwidth]{BrainProtonDensitySliceRotated10} // \itkcaption[Rigid2D Registration input images]{Fixed and moving images // are provided as input to the registration method using the CenteredRigid2D // transform.} // \label{fig:FixedMovingImageRegistration5} // \end{figure} // // // \begin{figure} // \center // \includegraphics[width=0.32\textwidth]{ImageRegistration5Output} // \includegraphics[width=0.32\textwidth]{ImageRegistration5DifferenceBefore} // \includegraphics[width=0.32\textwidth]{ImageRegistration5DifferenceAfter} // \itkcaption[Rigid2D Registration output images]{Resampled moving image // (left). Differences between the fixed and moving images, before (center) // and after (right) registration using the Euler2D transform.} // \label{fig:ImageRegistration5Outputs} // \end{figure} // // Figure \ref{fig:ImageRegistration5Outputs} shows from left to right the // resampled moving image after registration, the difference between the fixed // and moving images before registration, and the difference between the fixed // and resampled moving image after registration. It can be seen from the // last difference image that the rotational component has been solved but // that a small centering misalignment persists. // // \begin{figure} // \center // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceMetric1} // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceAngle1} // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceTranslations1} // \itkcaption[Rigid2D Registration output plots]{Metric values, rotation // angle and translations during registration with the Euler2D // transform.} // \label{fig:ImageRegistration5Plots} // \end{figure} // // Figure \ref{fig:ImageRegistration5Plots} shows plots of the main output // parameters produced from the registration process. This includes the // metric values at every iteration, the angle values at every iteration, // and the translation components of the transform as the registration // progresses. // // Software Guide : EndLatex using ResampleFilterType = itk::ResampleImageFilter< MovingImageType, FixedImageType >; //TransformType::ConstPointer finalTransform = TransformType::New(); //TransformType::ConstPointer finalTransform = registration->GetTransform(); ResampleFilterType::Pointer resample = ResampleFilterType::New(); //这里是用来验证图像的坐标轴的 //centerMoving[0] = 40; //centerMoving[1] = 40; //centerFixed[0] = 0; //centerFixed[1] = 0; //initialTransform->SetTranslation(centerMoving - centerFixed); //resample->SetTransform(initialTransform); resample->SetTransform(registration->GetTransform()); resample->SetInput(movingImageReader->GetOutput()); resample->SetSize(fixedImage->GetLargestPossibleRegion().GetSize()); resample->SetOutputOrigin(fixedImage->GetOrigin()); resample->SetOutputSpacing(fixedImage->GetSpacing()); resample->SetOutputDirection(fixedImage->GetDirection()); resample->SetDefaultPixelValue(100); using OutputPixelType = unsigned char; using OutputImageType = itk::Image< OutputPixelType, Dimension >; using CastFilterType = itk::CastImageFilter< FixedImageType, OutputImageType >; using WriterType = itk::ImageFileWriter< OutputImageType >; WriterType::Pointer writer = WriterType::New(); CastFilterType::Pointer caster = CastFilterType::New(); writer->SetFileName("D:\\Files\\ITKFiles\\ITK_8_RigidRegistration\\Data\\ResampledMovingImage.png"); caster->SetInput(resample->GetOutput()); writer->SetInput(caster->GetOutput()); try { writer->Update(); } catch (itk::ExceptionObject& excp) { std::cerr << "ExceptionObject while writing the resampled image !" << std::endl; std::cerr << excp << std::endl; return EXIT_FAILURE; } using DifferenceImageType = itk::Image< float, Dimension >; using DifferenceFilterType = itk::SubtractImageFilter< FixedImageType, FixedImageType, DifferenceImageType >; DifferenceFilterType::Pointer difference = DifferenceFilterType::New(); using RescalerType = itk::RescaleIntensityImageFilter< DifferenceImageType, OutputImageType >; RescalerType::Pointer intensityRescaler = RescalerType::New(); intensityRescaler->SetOutputMinimum(0); intensityRescaler->SetOutputMaximum(255); difference->SetInput1(fixedImageReader->GetOutput()); difference->SetInput2(resample->GetOutput()); resample->SetDefaultPixelValue(1); intensityRescaler->SetInput(difference->GetOutput()); WriterType::Pointer writer2 = WriterType::New(); writer2->SetInput(intensityRescaler->GetOutput()); try { // Compute the difference image between the // fixed and moving image after registration. if (argc > 4) { writer2->SetFileName("D:\\Files\\ITKFiles\\ITK_8_RigidRegistration\\Data\\DifferenceBefore.png"); writer2->Update(); } // Compute the difference image between the // fixed and resampled moving image after registration. TransformType::Pointer identityTransform = TransformType::New(); identityTransform->SetIdentity(); resample->SetTransform(identityTransform); if (argc > 5) { writer2->SetFileName("D:\\Files\\ITKFiles\\ITK_8_RigidRegistration\\Data\\DifferenceAfter.png"); writer2->Update(); } } catch (itk::ExceptionObject& excp) { std::cerr << "Error while writing difference images" << std::endl; std::cerr << excp << std::endl; return EXIT_FAILURE; } // Software Guide : BeginLatex // // Let's now consider the case in which rotations and translations are // present in the initial registration, as in the following pair // of images: // // \begin{itemize} // \item \code{BrainProtonDensitySliceBorder20.png} // \item \code{BrainProtonDensitySliceR10X13Y17.png} // \end{itemize} // // The second image is the result of intentionally rotating the first image // by $10$ degrees and then translating it $13mm$ in $X$ and $17mm$ in $Y$. // Both images have unit-spacing and are shown in Figure // \ref{fig:FixedMovingImageRegistration5b}. In order to accelerate // convergence it is convenient to use a larger step length as shown here. // 为了加快融合应该设置一个更大的步长 // \code{optimizer->SetMaximumStepLength( 1.3 );} // // The registration now takes $37$ iterations and produces the following // results: // // \begin{center} // \begin{verbatim} // [0.174582, 13.0002, 16.0007] // \end{verbatim} // \end{center} // // These parameters are interpreted as // // \begin{itemize} // \item Angle = $0.174582$ radians // \item Translation = $( 13.0002, 16.0007 )$ millimeters // \end{itemize} // // These values approximately match the initial misalignment intentionally // introduced into the moving image, since $10$ degrees is about $0.174532$ // radians. The horizontal translation is well resolved while the vertical // translation ends up being off by about one millimeter. // // \begin{figure} // \center // \includegraphics[width=0.44\textwidth]{BrainProtonDensitySliceBorder20} // \includegraphics[width=0.44\textwidth]{BrainProtonDensitySliceR10X13Y17} // \itkcaption[Rigid2D Registration input images]{Fixed and moving images // provided as input to the registration method using the CenteredRigid2D // transform.} // \label{fig:FixedMovingImageRegistration5b} // \end{figure} // // // \begin{figure} // \center // \includegraphics[width=0.32\textwidth]{ImageRegistration5Output2} // \includegraphics[width=0.32\textwidth]{ImageRegistration5DifferenceBefore2} // \includegraphics[width=0.32\textwidth]{ImageRegistration5DifferenceAfter2} // \itkcaption[Rigid2D Registration output images]{Resampled moving image // (left). Differences between the fixed and moving images, before (center) // and after (right) registration with the CenteredRigid2D transform.} // \label{fig:ImageRegistration5Outputs2} // \end{figure} // // Figure \ref{fig:ImageRegistration5Outputs2} shows the output of the // registration. The rightmost image of this figure shows the difference // between the fixed image and the resampled moving image after registration. // // \begin{figure} // \center // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceMetric2} // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceAngle2} // \includegraphics[height=0.32\textwidth]{ImageRegistration5TraceTranslations2} // \itkcaption[Rigid2D Registration output plots]{Metric values, rotation // angle and translations during the registration using the Euler2D // transform on an image with rotation and translation mis-registration.} // \label{fig:ImageRegistration5Plots2} // \end{figure} // // Figure \ref{fig:ImageRegistration5Plots2} shows plots of the main output // registration parameters when the rotation and translations are combined. // These results include the metric values at every iteration, the angle // values at every iteration, and the translation components of the // registration as the registration converges. It can be seen from the // smoothness of these plots that a larger step length could have been // supported easily by the optimizer. You may want to modify this value in // order to get a better idea of how to tune the parameters. // // Software Guide : EndLatex return EXIT_SUCCESS; }
三、程序注意事项
这个程序和之前的程序有几点不同:
1-这里设置的矩阵和之前不一样,在Helloworld 程序里面的矩阵,包括两个初始化矩阵,那是适用于多层配准的一般方法的,而我们如今定义的这种方式要更加直接。
2-图像的输入和输出参数在注释中已经有了(输入图片在toolkit/Examples/Data里面),所以要注意,这里我使用的是第二组图片:
// INPUTS: {BrainProtonDensitySliceBorder20.png} // INPUTS: {BrainProtonDensitySliceR10X13Y17.png} // OUTPUTS: {ImageRegistration5Output2.png} // OUTPUTS: {ImageRegistration5DifferenceAfter2.png} // OUTPUTS: {ImageRegistration5DifferenceBefore2.png} // ARGUMENTS: 1.0
3-我们在使用2中提到的图片的时候,需要修改配准的最小步长,使得它大一点,不然即使达到了最大的迭代次数,也达不到条件。
double initialStepLength = 1.3;//0.1;
我们可以在命令行第六个参数中设置为1.3
4-我们得到的矩阵如下:
const TransformType::ParametersType finalParameters = registration->GetOutput()->Get()->GetParameters(); const double finalAngle = finalParameters[0]; const double finalTranslationX = finalParameters[1]; const double finalTranslationY = finalParameters[2];
矩阵输出如下:
std::cout << "Result = " << std::endl; std::cout << " Angle (radians) = " << finalAngle << std::endl; std::cout << " Angle (degrees) = " << finalAngleInDegrees << std::endl; std::cout << " Translation X = " << finalTranslationX << std::endl; std::cout << " Translation Y = " << finalTranslationY << std::endl;
输出:
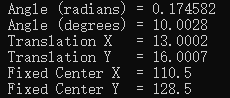
可以看到,矩阵的第一个参数是以弧度制表示的角度(rad),第二个和第三个则是位移(mm)
5- 我们的得到的图像,其原点位于左上方,水平方向为X轴,竖直方向为Y轴,如下:
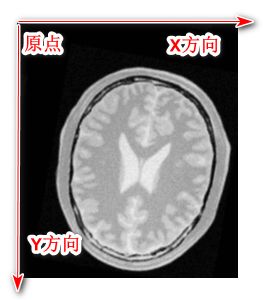
验证如下:
在写校正之后的文件的时候,当我们把597行的平移参数设置为如下代码的时候:
//这里是用来验证图像的坐标轴的 centerMoving[0] = 40; centerMoving[1] = 40; centerFixed[0] = 0; centerFixed[1] = 0; initialTransform->SetTranslation(centerMoving - centerFixed); resample->SetTransform(initialTransform); //resample->SetTransform(registration->GetTransform());
我们得到的图像相比如原来的来说:
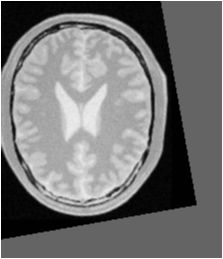
平移变大 原有图像
这个时候我们得到的图像相对于原来的来说,朝着左上角平移了一定距离。
所以上面猜想是正确的。
其他的具体情况可以参考指导书
四、参考
参考书籍:InsightSoftwareGuide-Book2-5.0.1 Registration-Center Initialization Page209
源码:ImageRegistration5.cxx