欢迎关注微信公众号:GIS航空数据处理
微信号:GISchuli

遥感定义
广义:泛指一切无接触的远距离探测,实际工作中重力、磁力、声波、地震波等的探测被划为物理探测范畴。因此只有电磁波探测属于遥感的范畴。
狭义:指空对地的探测。
遥感类型
按遥感平台:地面遥感、航空遥感、航天遥感、航宇遥感
按传感器的探测波段:紫外遥感、可见光遥感、红外遥感、微波遥感、多波段遥感。
按工作方式:主动遥感、被动遥感。
空中三角测量
空三处理提供地理参照的影像,是建立所有摄影测量项目的几何级基础。
空中三角测量是立体摄影测量中,根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法。其主要目的是为缺少野外控制点的地区测图提供绝对定向的控制点。
空中三角测量一般分为两种:
模拟空中三角测量即光学机械法空中三角测量;
解析空中三角测量即俗称的电算加密。
模拟空中三角测量是在全能型立体测量仪器(如多倍仪)上进行的空中三角测量。它是在仪器上恢复与摄影时相似或相应的航线立体模型,根据测图需要选定加密点,并测定其高程和平面位置。
航空摄影测量中利用连续摄取的具有一定重叠的航摄像片,依据少量野外控制点,以摄影测量方法建立同实地相应的航线模型或区域网模型(光学的或数字的),从而获取加密点的平面坐标和高程。主要用于测地形图。

地面分辨率
地面分辨率是衡量遥感图像(或影像)能有差别地区分开相邻地物的最小距离的能力。超过分辨率的限度,相邻两物体在图像(影像)上即表现为一个单一的目标。
地图精度
地图精度就是地图的精确度,即地图的误差大小,是衡量地图质量的重要标志之一它与地图投影、比例尺、制作方法和工艺有关。通常用地图上某一地物点或地物轮廓点的平面和高程位置偏离其真实位置的平均误差衡量。
地图要素的误差主要由以下几方面引起:资料数据和图稿的误差;地图投影的误差;展绘地图数学基础的误差;转绘地图内容的误差;制图综合产生的误差;复照和印刷造成的误差和图纸伸缩造成的误差。这些误差难以避免。
在地图生产过程中,一般对每一生产工序都进行误差控制,以便达到地图的精度要求。如展绘地图数学基础时,展点允许误差为±0.1毫米,边长误差≤±0.2毫米,对角线误差≤±0.3毫米;内容转绘误差<±0.2毫米;描绘误差<±0.2毫米;印刷套印误≤±0.3毫米等。因存在地图误差,故在地图上进行量算时,对量测的数据必须考虑地图的各项误差。
比例尺
比例尺是表示图上一条线段的长度(d)与地面相应线段的实际长度(D)之比。一般用分子为1的整分数表示,即:

地图比例尺
指地图上的线段长度与实地相应线段长度之比。严格讲,只有在表示小范围的大比例尺地图上,由于不考虑地球的曲率,全图比例尺才是一致的。比例尺与
地图内容的详细程度和精度有关。一般讲,大比例尺地图,内容详细,几何精度高,可用于图上测量。小比例尺地图,内容概括性强,不宜于进行图上测量。 地图比例尺是指图上某线段的长度与相应的实地水平距离之比。即:地图比例尺=图上距离/相应实地水平距离。 我国的国家基本比例尺地图的比例尺应为:1∶500、1∶1000、1∶2000、1∶5000、1∶10000、1∶25000、1∶50000、1∶100000、1∶250000、1∶500000、1∶1000000、1:25000000、1:50000000. 一般的,1:10万以下算小比例尺,以上算大比例尺。
导航定位定向系统(简称:POS系统)
是通过全球导航卫星系统(GNSS)获取位置数据作为初始值,通过惯导系统(IMU)获取姿态变化增量,应用卡尔曼滤波器、反馈误差控制迭代运算,生成实时导航数据。
应用POS系统可以得到移动平台位置和姿态的轨迹数据。
能够实现直接地学定位,可以减少或省略空中三角测量的地面控制点。可以与任何类型的量测类型的传感器(航摄像机、机载激光雷达(LIDAR)、高光谱成像仪、机载合成孔径雷达(SAR)和机载干涉雷达(InSAR)等)直接连接使用。
应用机载POS组合导航系统可以获取摄影相机的外方位元素和飞机的绝对位置,实现定点摄影成像和无地面控制的高精度对地直接定位。该技术和方法还广泛用于高空分辨率卫星影像的的几何处理中,大量研究集中在稀少控制点和无控制点条件下如何提高影像的平面和高程精度。我国正在采用航天遥感,数字航空摄影,航空航天可见光成像、激光扫描成像、合成孔径雷达成像,卫星导航定位,地理信息系统,无控制点或稀少控制点测绘等现代地理空间技术的集成手段进行测绘工程。
大地基准面
是建立国家大地坐标系统和推算国家大地控制网中各点大地坐标的基本依据,它包括一组大地测量参数和一组起算数据,其中,大地测量参数主要包括作为建立大地坐标系依据的地球椭球的四个常数,即地球椭球赤道半径啊,地心引力常数GM,带球谐系数J2(由此导出椭球扁率f)和地球自转角度w,以及用以确定大地坐标系统和大地控制网长度基准的真空光速c;而一组起算数据是指国家大地控制网起算点(成为大地原点)的大地经度、大地纬度、大地高程和至想邻点方向的大地方位角。
DTM(Digital Terrain Model)
数字地形(或地面)模型(DTM, Digital Terrain Model,缩写DTM)最初是为了高速公路的自动设计提出来的(Miller,1956)。此后,它被用于各种线路选线(铁路、公路、输电线)的设计以及各种工程的面积、体积、坡度计算,任意两点间的通视判断及任意断面图绘制。在测绘中被用于绘制等高线、坡度坡向图、立体透视图,制作正射影像图以及地图的修测。在遥感应用中可作为分类的辅助数据。它还是地理信息系统的基础数据,可用于土地利用现状的分析、合理规划及洪水险情预报等。在军事上可用于导航及导弹制导、作战电子沙盘等。对DTM的研究包括DTM的精度问题、地形分类、数据采集、DTM的粗差探测、质量控制、数据压缩、DTM应用以及不规则三角网DTM的建立与应用等。
DEM (Digital Elevation Model)
数字高程模型(Digital Elevation Model,缩写DEM)是一定范围内规则格网点的平面坐标(X,Y)及其高程(Z)的数据集,它主要是描述区域地貌形态的空间分布,是通过等高线或相似立体模型进行数据采集(包括采样和量测),然后进行数据内插而形成的。DEM是对地貌形态的虚拟表示,可派生出等高线、坡度图等信息,也可与DOM或其它专题数据叠加,用于与地形相关的分析应用,同时它本身还是制作DOM的基础数据。
DEM是用一组有序数值阵列形式表示地面高程的一种实体地面模型,是数字地形模型DTM的一个分支。一般认为,DTM是描述包括高程在内的各种地貌因子,如坡度、坡向、坡度变化率等因子在内的线性和非线性组合的空间分布,其中DEM是零阶单纯的单项数字地貌模型,其他如坡度、坡向及坡度变化率等地貌特性可在DEM的基础上派生。DTM的另外两个分支是各种非地貌特性的以矩阵形式表示的数字模型,包括自然地理要素以及与地面有关的社会经济及人文要素,如土壤类型、土地利用类型、岩层深度、地价、商业优势区等等。实际上DTM是栅格数据模型的一种。它与图像的栅格表示形式的区别主要是:图像是用一个点代表整个像元的属性,而在DTM中,格网的点只表示点的属性,点与点之间的属性可以通过内插计算获得。
建立DEM的方法有多种。从数据源及采集方式讲有:(1)直接从地面测量,例如用GPS、全站仪、野外测量等;根据航空或航天影像,通过摄影测量途径获取,如立体坐标仪观测及空三加密法、解析测图、数字摄影测量等等;(3)从现有地形图上采集,如格网读点法、数字化仪手扶跟踪及扫描仪半自动采集然后通过内插生成DEM等方法。DEM内插方法很多,主要有分块内插、部分内插和单点移面内插三种。目前常用的算法是通过等高线和高程点建立不规则的三角网(Triangular Irregular Network, TIN)。然后在TIN基础上通过线性和双线性内插建DEM。
由于DEM描述的是地面高程信息,它在测绘、水文、气象、地貌、地质、土壤、工程建设、通讯、气象、军事等国民经济和国防建设以及人文和自然科学领域有着广泛的应用。如在工程建设上,可用于如土方量计算、通视分析等;在防洪减灾方面,DEM是进行水文分析如汇水区分析、水系网络分析、降雨分析、蓄洪计算、淹没分析等的基础;在无线通讯上,可用于蜂窝电话的基站分析等。
DSM (Digital Surface Model)
数字表面模型(Digital Surface Model,缩写DSM)是指包含了地表建筑物、桥梁和树木等高度的地面高程模型。和DEM相比,DEM只包含了地形的高程信息,并未包含其它地表信息,DSM是在DEM的基础上,进一步涵盖了除地面以外的其它地表信息的高程。在一些对建筑物高度有需求的领域,得到了很大程度的重视。
DSM表示的是最真实地表达地面起伏情况,可广泛应用于各行各业。如在森林地区,可以用于检测森林的生长情况;在城区,DSM可以用于检查城市的发展情况;特别是众所周知的巡航导弹,它不仅需要数字地面模型,而更需要的是数字表面模型,这样才有可能使巡航导弹在低空飞行过程中,逢山让山,逢森林让森林。
下图形象地说明了DTM与DSM的不同
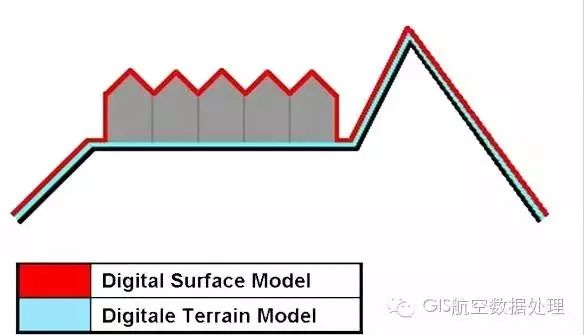
由此可见DSM的应用前景,也证明surface model应该译为表面模型。
DOM(Digital Orthophoto Map)
数字正射影像图(Digital Orthophoto Map,缩写DOM)是利用DEM对经过扫描处理的数字化航空像片或遥感影像(单色或彩色),经逐像元进行辐射改正、微分纠正和镶嵌,并按规定图幅范围裁剪生成的形象数据,带有公里格网、图廓(内、外)整饰和注记的平面图。
DOM同时具有地图几何精度和影像特征,精度高、信息丰富、直观真实、制作周期短。它可作为背景控制信息,评价其它数据的精度、现实性和完整性,也可从中提取自然资源和社会经济发展信息,为防灾治害和公共设施建设规划等应用提供可靠依据。
倾斜摄影原理
倾斜摄影技术,通过在同一飞行平台上搭载多台传感器(目前常用的是五镜头相机)。同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。垂直地面角度拍摄获取的是垂直向下的一组影像,称为正片,镜头朝向与地面成一定夹角拍摄获取的四组影像分别指向东南西北,称为斜片。 摄取范围如下图:

在建立建筑物表面模型的过程中,下图可以看到,相比垂直影像,倾斜影像有着显著的优点,因为它能提供更好的视角去观察建筑物侧面,这一特点正好满足了建筑物表面纹理生成的需要。同一区域拍摄的垂直影像可被用来生成三维城市模型或是对生成的三维城市模型的改善。
利用建模软件将照片建模,这里的照片不仅仅是通过无人机航拍的倾斜摄影数据,还可以是单反甚至是手机以一定重叠度环拍而来的,这些照片导入到建模软件中,通过计算机图形计算,结合pos信息空三处理,生成点云,点云构成格网,格网结合照片生成赋有纹理的三维模型。区域整体三维建模方法生产路线图:
好马配好鞍,对于图形软件效率的提升,一个高配置的处理器是少不了的
下面就简单的认识下工作站和GPU & CPU
工作站
由计算机和相应的外部设备以及成套的应用软件包所组成的信息处理系统。它能够完成用户交给的特定任务,是推动计算机普及应用的有效方式。工作站应具备强大的数据处理能力,有直观的便于人机交换信息的用户接口,可以与计算机网相连,在更大的范围内互通信息,共享资源。工作站在编程、计算、文件书写、存档、通信等各方面给专业工作者以综合的帮助。常见的工作站有计算机辅助设计 (CAD)工作站(或称工程工作站),办公自动化(OA)工作站,图像处理工作站等。不同任务的工作站有不同的硬件和软件配置。例如,一个小型CAD工作站的典型硬件配置为:小型计算机(或高档的微型计算机),带有功能键的 CRT终端,光笔,平面绘图仪,数字化仪,打印机等。软件配置为:操作系统,编译程序,相应的数据库和数据库管理系统,二维和三维的绘图软件,以及成套的计算、分析软件包。显卡:作为图形工作站的主要组成部分,一块性能强劲的3D专业显卡的重要性,从某种意义上来说甚至超过了处理器。与针对游戏、娱乐市场为主的消费类显卡相比,3D专业显卡主要面对的是3维动画(如3DSMax、Maya、Softimage|3D)、渲染(如LightScape、3DSVIZ)、CAD(如AutoCAD、Pro/Engineer、Unigraphics、SolidWorks)、模型设计(如Rhino)以及部分科学应用等专业OpenGL应用市场。对这部分图形工作站用户来说,它们所使用的硬件无论是速度、稳定性还是软件的兼容性都很重要。
GPU & CPU
GPU英文全称Graphic Processing Unit,中文翻译为“图形处理器”。GPU是相对于CPU的一个概念,由于在现代的计算机中(特别是家用系统,游戏的发烧友)图形的处理变得越来越重要,需要一个专门的图形的核心处理器。GPU使显卡减少了对CPU的依赖,并进行部分原本CPU的工作,尤其是在3D图形处理时。
GPU所采用的核心技术有硬体T&L、立方环境材质贴图和顶点混合、纹理压缩和凹凸映射贴图、双重纹理四像素256位渲染引擎等,而硬体T&L技术可以说是GPU的标志。GPU核心频率、管线数量、着色单元数量基本可以代表一款GPU的性能。具有专用性特点,擅长图形计算和处理。
CPU是英语“Central Processing Unit”,中文名称叫作“中央处理器”,或叫作微处理器。它由运算器和控制器组成,是电脑的心脏,它决定电脑档次的高低。它是用半导体材料经过复杂的加工而生产出来的。
CPU的功能是取出、解释并执行指令。工作重点不一样,GPU相当于一位具有图形计算和处理专长的高级助理。
