这个问题本来是《人工智能技术导论》第三章的课后题,今天上午考试正巧考到了这道题,要我们画状态转换图,我之前思考过一点,所以写出的状态表示应该没有问题,但这些状态太多了.......,十来种状态直接给我干懵逼了,两个小时的考试,差不多得有一个小时在推导状态转换关系,最后整个考场就剩下我和谭神两个人了,这里写下博客,整理一下这个问题。
网上搜索发现这个博主的做法和我的做法大致一样的,他最后给出了C++的实现方式。这篇博客状态分析部分就主要参考https://www.cnblogs.com/guanghe/p/5485800.html
后面再附上PROLOG程序的解决方案。
一、问题重述
在河的左岸有N个传教士、N个野人和一条船,传教士们想用这条船把所有人都运过河去,但有以下条件限制:
(1)修道士和野人都会划船,但船每次最多只能运K个人;
(2)在任何岸边野人数目都不能超过修道士,否则修道士会被野人吃掉。
假定野人会服从任何一种过河安排,请规划出一个确保修道士安全过河的计划。
二、问题分析
1、约束条件
① M≧C 任何时刻两岸、船上都必须满足传教士人数不少于野人数(M=0时除外,既没有传教士)
② M+C≦K 船上人数限制在K以内
2、求解
传教士与野人全部安全渡到对岸的解决方案
三、状态表示
设N=3,K=2(三个M和三个C,每次渡河二人以下)
L:左岸,R:右岸,
B:是否有船(0:无船,1:有船)
定义:用三元组(ML,CL,BL)表示左岸状态,其中:
0≦ML,CL≦3,BL∈{0,1}
如:(0,3,1)表示左岸有三个野人,船在左岸。
从(3,3,1)到(0,0,0)的状态转换
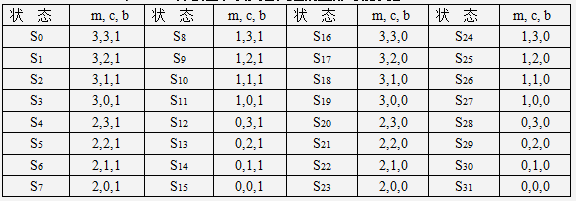
状态空间:32 种状态,其中:
12种不合理状态:如(1,0,1)说明右岸有2个M,3个C;
4种不可能状态:如(3,3,0)说明所有M和C都在左岸,而船在右岸
∴可用的状态共16种,组成合理的状态空间
状态空间具体描述
四、操作集
定义:Pmc操作:从左岸划向右岸
Qmc操作:从右岸划向左岸
船上人数组合(m,c)共5种(1,0),(1,1),(2,0),(0,1),(0,2)
∵每一种船上的人数组合同时对应P,Q二种操作
∴系统共有5×2=10种操作(规则)
如:P10:if (ML,CL,BL=1) then (ML-1,CL,BL-1)
如果船在左岸,那么一个传教士划船到右岸
Q01:if (ML,CL,BL=0) then (ML,CL+1,BL+1)
如果船在右岸,那么一个野人划船回到左岸
总共有10种操作
F={P10,P20, P11, P01, P02, Q 10, Q 20, Q 11, Q 01, Q 02}
P10 if( ML ,CL , BL=1 ) then ( ML–1 , CL , BL–1 )
P01 if( ML ,CL , BL=1 ) then ( ML , CL–1 , BL–1 )
P11 if( ML ,CL , BL=1 ) then ( ML–1 , CL–1 ,BL –1 )
P20 if( ML ,CL , BL=1 ) then ( ML–2 , CL , BL–1 )
P02 if( ML ,CL , BL=1 ) then ( ML , CL–2 , BL–1 )
Q10 if( ML ,CL , BL=0 ) then ( ML+1 , CL ,BL+1 )
Q01 if( ML ,CL , BL=0 ) then ( ML , CL+1 , BL+1 )
Q11 if( ML ,CL , BL=0 ) then ( ML+1 , CL +1,BL +1 )
Q20 if( ML ,CL , BL=0 ) then ( ML+2 , CL +2,BL +1 )
Q02 if( ML ,CL , BL=0 ) then ( ML , CL +2, BL+1 )
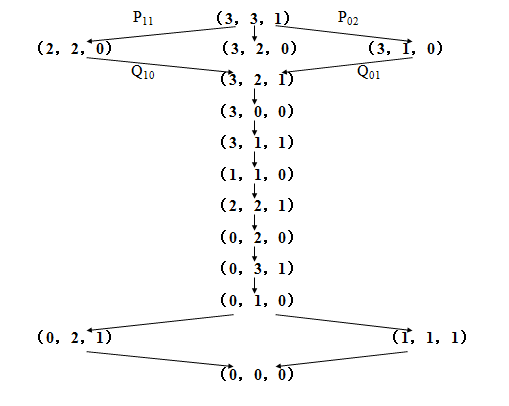
控制策略
最短路径有4条,由11次操作构成。
(P11、Q10、P02、Q01、P20、Q11、P20、Q01、P02、Q01、P02)
(P11、Q10、P02、Q01、P20、Q11、P20、Q01、P02、Q10、P11)
(P02、Q01、P02、Q01、P20、Q11、P20、Q01、P02、Q01、P02)
(P02、Q01、P02、Q01、P20、Q11、P20、Q01、P02、Q10、P11)
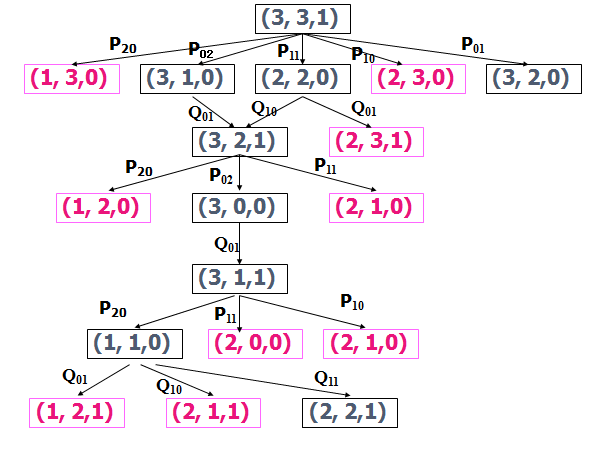
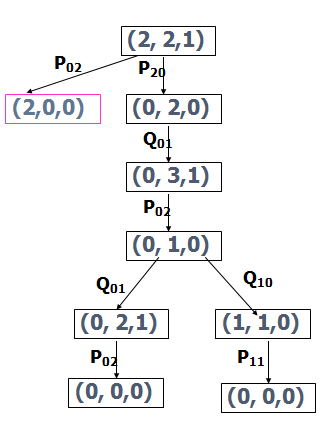
五、状态空间图
状态空间图是一个有向图,图中的节点代表状态,节点之间的连线代表操作,箭头代表状态的转换方向。
六、PROLOG程序设计
这里给出参考的链接https://github.com/kylynf/PrologMC
% start([3,3,near]). % goal([0,0,far]). change(near,far). change(far,near). % boat must be in valid location % valid number of missionaries and cannibals on each shore % no more than three and no fewer than zero valid([Missionaries,Cannibals,near]) :- Missionaries=<3, Cannibals=<3, Missionaries>=0, Cannibals>=0. valid([Missionaries,Cannibals,far]) :- Missionaries=<3, Cannibals=<3, Missionaries>=0, Cannibals>=0. % oneEq(X,X,_). % oneEq(X,_,X). % no missionaries are in danger of being eaten safe([Missionaries,Cannibals,_]) :- % oneEq(3,3,_),oneEq(2,2,_),oneEq(1,1,_),oneEq(0,0,_),oneEq(0,1,_),oneEq(0,2,_),oneEq(0,3,_),oneEq(3,0,_),oneEq(3,1,_),oneEq(3,2,_). % (Missionaries=0), (Missionaries>=Cannibals ; Missionaries=0), FarMis is 3 - Missionaries, FarCan is 3 - Cannibals, (FarMis >= FarCan; FarMis=0). % onemissionary move([M1,C1,B1],onemissionary,[M2,C2,B2]) :- change(B1, B2), C1 = C2, (B1=near -> DM is M1-1 ; DM is M1+1), M2 = DM. %twomissionaries move([Missionaries1,Cannibals1,Boat1],twomissionaries,[Missionaries2,Cannibals2,Boat2]) :- change(Boat1,Boat2), Cannibals1 = Cannibals2, (Boat1=near -> DummyMissionary is Missionaries1-2 ; DummyMissionary is Missionaries1+2), Missionaries2 = DummyMissionary. %onecannibal move([Missionaries1,Cannibals1,Boat1],onecannibal,[Missionaries2,Cannibals2,Boat2]) :- % boat1==near,boat2==far,Cannibals2 is Cannibals1 - 1; % boat1==far,boat2==near,Cannibals2 is Cannibals1 + 1. change(Boat1,Boat2), Missionaries1 = Missionaries2, (Boat1=near -> DummyCannibal is Cannibals1-1 ; DummyCannibal is Cannibals1+1), Cannibals2 = DummyCannibal. %twocannibal move([Missionaries1,Cannibals1,Boat1],twocannibals,[Missionaries2,Cannibals2,Boat2]) :- change(Boat1, Boat2), Missionaries1 = Missionaries2, (Boat1=near -> DummyCannibal is Cannibals1-2 ; DummyCannibal is Cannibals1+2), Cannibals2 = DummyCannibal. % oneofeach move([Missionaries1,Cannibals1,Boat1],oneofeach,[Missionaries2,Cannibals2,Boat2]) :- change(Boat1,Boat2), (Boat1=near -> DummyCannibal is Cannibals1-1, DummyMissionary is Missionaries1-1 ; DummyCannibal is Cannibals1+1, DummyMissionary is Missionaries1+1), Cannibals2 = DummyCannibal, Missionaries2 = DummyMissionary. solution([0,0,far],[]). solution(State,[Move|Rest]) :- move(State,Move,NextState), valid(NextState), safe(NextState), solution(NextState,Rest). solve(X) :- length(X,11), solution([3,3,near],X).