本周的主要工作是win10+TensorFlow环境下的FCN全卷积神经网络的实现
FCN对图像进行像素级的分类,从而解决了语义级别的图像分割问题。与经典的CNN在卷积层使用全连接层得到固定长度的特征向量进行分类不同,FCN可以接受任意尺寸的输入图像,采用反卷积层对最后一个卷基层的特征图(feature map)进行上采样,使它恢复到输入图像相同的尺寸,从而可以对每一个像素都产生一个预测,同时保留了原始输入图像中的空间信息,最后奇偶在上采样的特征图进行像素的分类。它与卷积神经网络(CNN)的本质区别就是将卷积神经网络的全连层换成卷积层。
本来是打算复现FCN官方代码,后来发现官方使用的是Ubuntu+caffe,本机VMware未装Ubuntu系统所以改写FCN官方代码,并使用win10+TensorFlow实现
在这里使用的是VGG-19的模型和数据集训练
模型下载地址:
http://www.vlfeat.org/matconvnet/models/beta16/imagenet-vgg-verydeep-19.mat
数据集下载地址:
http://data.csail.mit.edu/places/ADEchallenge/ADEChallengeData2016.zip
文件结构:
训练效果图:

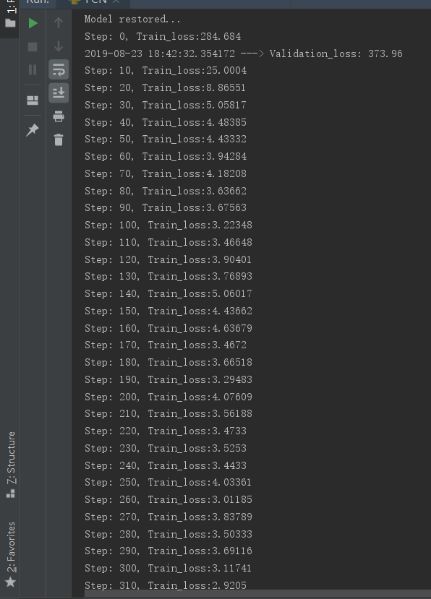

这里看到1000次训练结果loss较低,后续结果大多在3.0左右浮动,选用此次结果得到的模型
测试结果:

由于batch_size设置为2,所以测试图片为两张
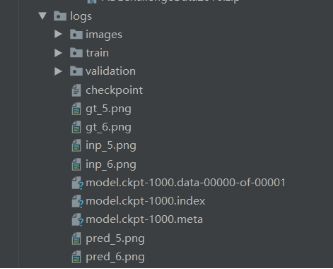
结果在logs文件夹显示出来
原图:

语义分割后:

结果不是特别好,应该是学习率大小不适合导致loss值降不下来
代码如下:
FCN.py
1 from __future__ import print_function 2 import tensorflow as tf 3 import numpy as np 4 5 import TensorflowUtils as utils 6 import read_MITSceneParsingData as scene_parsing 7 import datetime 8 import BatchDatsetReader as dataset 9 from six.moves import xrange 10 11 FLAGS = tf.flags.FLAGS 12 #batch大小 13 tf.flags.DEFINE_integer("batch_size", "2", "batch size for training") 14 #存放存放数据集的路径,需要提前下载 15 tf.flags.DEFINE_string("logs_dir", "logs/", "path to logs directory") 16 tf.flags.DEFINE_string("data_dir", "Data_zoo/MIT_SceneParsing/ADEChallengeData2016/", "path to dataset") 17 # 学习率 18 tf.flags.DEFINE_float("learning_rate", "1e-4", "Learning rate for Adam Optimizer") 19 # VGG网络参数文件,需要提前下载 20 tf.flags.DEFINE_string("model_dir", "Model_zoo/", "Path to vgg model mat") 21 tf.flags.DEFINE_bool('debug', "False", "Debug mode: True/ False") 22 tf.flags.DEFINE_string('mode', "visualize", "Mode train/ test/ visualize") 23 MODEL_URL = 'http://www.vlfeat.org/matconvnet/models/beta16/imagenet-vgg-verydeep-19.mat' 24 MAX_ITERATION = int(1e5 + 1) 25 # 最大迭代次数 26 NUM_OF_CLASSESS = 151 27 # 类的个数 28 IMAGE_SIZE = 224 29 # 图像尺寸 30 # vggnet函数 31 # 根据载入的权重建立原始的 VGGNet 的网络 32 def vgg_net(weights, image): 33 layers = ( 'conv1_1', 'relu1_1', 'conv1_2', 'relu1_2', 'pool1', 34 'conv2_1', 'relu2_1', 'conv2_2', 'relu2_2', 'pool2', 35 'conv3_1', 'relu3_1', 'conv3_2', 'relu3_2', 'conv3_3', 36 'relu3_3', 'conv3_4', 'relu3_4', 'pool3', 37 'conv4_1', 'relu4_1', 'conv4_2', 'relu4_2', 'conv4_3', 38 'relu4_3', 'conv4_4', 'relu4_4', 'pool4', 39 'conv5_1', 'relu5_1', 'conv5_2', 'relu5_2', 'conv5_3', 40 'relu5_3', 'conv5_4', 'relu5_4' 41 ) 42 net = {} 43 current = image 44 for i, name in enumerate(layers): 45 kind = name[:4] 46 if kind == 'conv': 47 kernels, bias = weights[i][0][0][0][0] 48 # matconvnet: weights are [width, height, in_channels, out_channels] 49 # tensorflow: weights are [height, width, in_channels, out_channels] 50 kernels = utils.get_variable(np.transpose(kernels, (1, 0, 2, 3)), name=name + "_w") 51 bias = utils.get_variable(bias.reshape(-1), name=name + "_b") 52 current = utils.conv2d_basic(current, kernels, bias) 53 elif kind == 'relu': 54 current = tf.nn.relu(current, name=name) 55 if FLAGS.debug: 56 utils.add_activation_summary(current) 57 elif kind == 'pool': 58 current = utils.avg_pool_2x2(current) 59 net[name] = current 60 return net 61 # inference函数,FCN的网络结构定义,网络中用到的参数是迁移VGG训练好的参数 62 def inference(image, keep_prob): 63 #输入图像和dropout值 64 """ 65 Semantic segmentation network definition 66 :param image: input image. Should have values in range 0-255 67 :param keep_prob: 68 :return: 69 """ 70 # 加载模型数据,获得标准化均值 71 print("setting up vgg initialized conv layers ...") 72 model_data = utils.get_model_data(FLAGS.model_dir, MODEL_URL) 73 mean = model_data['normalization'][0][0][0] 74 # 通过字典获取mean值,vgg模型参数里有normaliza这个字典,三个0用来去虚维找到mean 75 mean_pixel = np.mean(mean, axis=(0, 1)) 76 weights = np.squeeze(model_data['layers']) 77 # 从数组的形状中删除单维度条目,获得vgg权重 78 # 图像预处理 79 processed_image = utils.process_image(image, mean_pixel) 80 # 图像减平均值实现标准化 81 print("预处理后的图像:", np.shape(processed_image)) 82 with tf.variable_scope("inference"): 83 # 建立原始的VGGNet-19网络 84 print("开始建立VGG网络:") 85 image_net = vgg_net(weights, processed_image) 86 # 在VGGNet-19之后添加 一个池化层和三个卷积层 87 conv_final_layer = image_net["conv5_3"] 88 print("VGG处理后的图像:", np.shape(conv_final_layer)) 89 pool5 = utils.max_pool_2x2(conv_final_layer) 90 W6 = utils.weight_variable([7, 7, 512, 4096], name="W6") 91 b6 = utils.bias_variable([4096], name="b6") 92 conv6 = utils.conv2d_basic(pool5, W6, b6) 93 relu6 = tf.nn.relu(conv6, name="relu6") 94 if FLAGS.debug: 95 utils.add_activation_summary(relu6) 96 relu_dropout6 = tf.nn.dropout(relu6, keep_prob=keep_prob) 97 W7 = utils.weight_variable([1, 1, 4096, 4096], name="W7") 98 b7 = utils.bias_variable([4096], name="b7") 99 conv7 = utils.conv2d_basic(relu_dropout6, W7, b7) 100 relu7 = tf.nn.relu(conv7, name="relu7") 101 if FLAGS.debug: 102 utils.add_activation_summary(relu7) 103 relu_dropout7 = tf.nn.dropout(relu7, keep_prob=keep_prob) 104 W8 = utils.weight_variable([1, 1, 4096, NUM_OF_CLASSESS], name="W8") 105 b8 = utils.bias_variable([NUM_OF_CLASSESS], name="b8") 106 conv8 = utils.conv2d_basic(relu_dropout7, W8, b8) 107 # 第8层卷积层 分类2类 1*1*2 108 # annotation_pred1 = tf.argmax(conv8, dimension=3, name="prediction1") 109 # now to upscale to actual image size 110 # 对卷积后的结果进行反卷积操作 111 deconv_shape1 = image_net["pool4"].get_shape() 112 # 将pool4 即1/16结果尺寸拿出来 做融合 [b,h,w,c] 113 # 扩大两倍 所以stride = 2 kernel_size = 4 114 W_t1 = utils.weight_variable([4, 4, deconv_shape1[3].value, NUM_OF_CLASSESS], name="W_t1") 115 b_t1 = utils.bias_variable([deconv_shape1[3].value], name="b_t1") 116 conv_t1 = utils.conv2d_transpose_strided(conv8, W_t1, b_t1, output_shape=tf.shape(image_net["pool4"])) 117 fuse_1 = tf.add(conv_t1, image_net["pool4"], name="fuse_1") # 将pool4和conv_t1拼接,逐像素相加 118 119 deconv_shape2 = image_net["pool3"].get_shape() # 获得pool3尺寸 是原图大小的1/8 120 W_t2 = utils.weight_variable([4, 4, deconv_shape2[3].value, deconv_shape1[3].value], name="W_t2") 121 b_t2 = utils.bias_variable([deconv_shape2[3].value], name="b_t2") 122 conv_t2 = utils.conv2d_transpose_strided(fuse_1, W_t2, b_t2, output_shape=tf.shape(image_net["pool3"])) 123 fuse_2 = tf.add(conv_t2, image_net["pool3"], name="fuse_2") 124 shape = tf.shape(image) # 获得原始图像大小 125 deconv_shape3 = tf.stack([shape[0], shape[1], shape[2], NUM_OF_CLASSESS]) # 矩阵拼接 126 127 W_t3 = utils.weight_variable([16, 16, NUM_OF_CLASSESS, deconv_shape2[3].value], name="W_t3") 128 b_t3 = utils.bias_variable([NUM_OF_CLASSESS], name="b_t3") 129 conv_t3 = utils.conv2d_transpose_strided(fuse_2, W_t3, b_t3, output_shape=deconv_shape3, stride=8) 130 annotation_pred = tf.argmax(conv_t3, dimension=3, name="prediction") # (224,224,1)目前理解是每个像素点所有通道取最大值 131 return tf.expand_dims(annotation_pred, dim=3), conv_t3 # 从第三维度扩展形成[b,h,w,c] 其中c=1,即224*224*1*1 132 # 返回优化器 133 def train(loss_val, var_list): 134 optimizer = tf.train.AdamOptimizer(FLAGS.learning_rate) 135 grads = optimizer.compute_gradients(loss_val, var_list=var_list) 136 if FLAGS.debug: 137 # print(len(var_list)) 138 for grad, var in grads: 139 utils.add_gradient_summary(grad, var) 140 return optimizer.apply_gradients(grads) 141 # 主函数,返回优化器的操作步骤 142 def main(argv=None): 143 keep_probability = tf.placeholder(tf.float32, name="keep_probabilty") 144 image = tf.placeholder(tf.float32, shape=[None, IMAGE_SIZE, IMAGE_SIZE, 3], name="input_image") 145 annotation = tf.placeholder(tf.int32, shape=[None, IMAGE_SIZE, IMAGE_SIZE, 1], name="annotation") 146 # 定义好FCN的网络模型 147 pred_annotation, logits = inference(image, keep_probability) 148 # 定义损失函数,这里使用交叉熵的平均值作为损失函数 149 tf.summary.image("input_image", image, max_outputs=2) 150 tf.summary.image("ground_truth", tf.cast(annotation, tf.uint8), max_outputs=2) 151 tf.summary.image("pred_annotation", tf.cast(pred_annotation, tf.uint8), max_outputs=2) 152 loss = tf.reduce_mean((tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits, 153 labels=tf.squeeze(annotation, squeeze_dims=[3]), 154 name="entropy"))) 155 loss_summary = tf.summary.scalar("entropy", loss) 156 # 定义优化器, 返回需要训练的变量列表 157 trainable_var = tf.trainable_variables() 158 if FLAGS.debug: 159 for var in trainable_var: 160 utils.add_to_regularization_and_summary(var) 161 train_op = train(loss, trainable_var) 162 print("Setting up summary op...") 163 summary_op = tf.summary.merge_all() 164 # 加载数据集 165 166 print("Setting up image reader...") 167 train_records, valid_records = scene_parsing.read_dataset(FLAGS.data_dir) 168 print(len(train_records)) 169 print(len(valid_records)) 170 print("Setting up dataset reader") 171 image_options = {'resize': True, 'resize_size': IMAGE_SIZE} 172 if FLAGS.mode == 'train': 173 train_dataset_reader = dataset.BatchDatset(train_records, image_options) 174 # 读取图片 产生类对象 其中包含所有图片信息 175 validation_dataset_reader = dataset.BatchDatset(valid_records, image_options) 176 # 开始训练模型 177 sess = tf.Session() 178 print("Setting up Saver...") 179 saver = tf.train.Saver() 180 # 保存模型类实例化 181 # create two summary writers to show training loss and validation loss in the same graph 182 # need to create two folders 'train' and 'validation' inside FLAGS.logs_dir 183 train_writer = tf.summary.FileWriter(FLAGS.logs_dir + '/train', sess.graph) 184 validation_writer = tf.summary.FileWriter(FLAGS.logs_dir + '/validation') 185 sess.run(tf.global_variables_initializer()) 186 # 变量初始化 187 ckpt = tf.train.get_checkpoint_state(FLAGS.logs_dir) 188 if ckpt and ckpt.model_checkpoint_path: 189 # 如果存在checkpoint文件 则恢复sess 190 saver.restore(sess, ckpt.model_checkpoint_path) 191 print("Model restored...") 192 if FLAGS.mode == "train": 193 for itr in xrange(MAX_ITERATION): 194 train_images, train_annotations = train_dataset_reader.next_batch(FLAGS.batch_size) 195 feed_dict = {image: train_images, annotation: train_annotations, keep_probability: 0.85} 196 sess.run(train_op, feed_dict=feed_dict) 197 if itr % 10 == 0: 198 train_loss, summary_str = sess.run([loss, loss_summary], feed_dict=feed_dict) 199 print("Step: %d, Train_loss:%g" % (itr, train_loss)) 200 train_writer.add_summary(summary_str, itr) 201 if itr % 500 == 0: 202 valid_images, valid_annotations = validation_dataset_reader.next_batch(FLAGS.batch_size) 203 valid_loss, summary_sva = sess.run([loss, loss_summary], feed_dict={image: valid_images, annotation: valid_annotations, 204 keep_probability: 1.0}) 205 print("%s ---> Validation_loss: %g" % (datetime.datetime.now(), valid_loss)) 206 # add validation loss to TensorBoard 207 validation_writer.add_summary(summary_sva, itr) 208 saver.save(sess, FLAGS.logs_dir + "model.ckpt", itr) 209 # 保存模型 210 elif FLAGS.mode == "visualize": 211 valid_images, valid_annotations = validation_dataset_reader.get_random_batch(FLAGS.batch_size) 212 pred = sess.run(pred_annotation, feed_dict={image: valid_images, annotation: valid_annotations, 213 keep_probability: 1.0}) 214 # 预测测试结果 215 valid_annotations = np.squeeze(valid_annotations, axis=3) 216 pred = np.squeeze(pred, axis=3) 217 # 从数组的形状中删除单维条目,即把shape中为1的维度去掉 218 for itr in range(FLAGS.batch_size): 219 utils.save_image(valid_images[itr].astype(np.uint8), FLAGS.logs_dir, name="inp_" + str(5+itr)) 220 utils.save_image(valid_annotations[itr].astype(np.uint8), FLAGS.logs_dir, name="gt_" + str(5+itr)) 221 utils.save_image(pred[itr].astype(np.uint8), FLAGS.logs_dir, name="pred_" + str(5+itr)) 222 print("Saved image: %d" % itr) 223 224 if __name__ == "__main__": 225 tf.app.run()
TensorflowUtils.py
1 # Utils used with tensorflow implemetation 2 import tensorflow as tf 3 import numpy as np 4 import scipy.misc as misc 5 import os, sys 6 from six.moves import urllib 7 import tarfile 8 import zipfile 9 import scipy.io 10 from functools import reduce 11 12 # 下载VGG模型的数据 13 def get_model_data(dir_path, model_url): 14 maybe_download_and_extract(dir_path, model_url) 15 filename = model_url.split("/")[-1] 16 filepath = os.path.join(dir_path, filename) 17 if not os.path.exists(filepath): 18 raise IOError("VGG Model not found!") 19 data = scipy.io.loadmat(filepath) 20 return data 21 22 23 def maybe_download_and_extract(dir_path, url_name, is_tarfile=False, is_zipfile=False): 24 if not os.path.exists(dir_path): 25 os.makedirs(dir_path) 26 filename = url_name.split('/')[-1] 27 filepath = os.path.join(dir_path, filename) 28 if not os.path.exists(filepath): 29 def _progress(count, block_size, total_size): 30 sys.stdout.write( 31 '\r>> Downloading %s %.1f%%' % (filename, float(count * block_size) / float(total_size) * 100.0)) 32 sys.stdout.flush() 33 34 filepath, _ = urllib.request.urlretrieve(url_name, filepath, reporthook=_progress) 35 print() 36 statinfo = os.stat(filepath) 37 print('Succesfully downloaded', filename, statinfo.st_size, 'bytes.') 38 if is_tarfile: 39 tarfile.open(filepath, 'r:gz').extractall(dir_path) 40 elif is_zipfile: 41 with zipfile.ZipFile(filepath) as zf: 42 zip_dir = zf.namelist()[0] 43 zf.extractall(dir_path) 44 45 46 def save_image(image, save_dir, name, mean=None): 47 """ 48 Save image by unprocessing if mean given else just save 49 :param mean: 50 :param image: 51 :param save_dir: 52 :param name: 53 :return: 54 """ 55 if mean: 56 image = unprocess_image(image, mean) 57 misc.imsave(os.path.join(save_dir, name + ".png"), image) 58 59 60 def get_variable(weights, name): 61 init = tf.constant_initializer(weights, dtype=tf.float32) 62 var = tf.get_variable(name=name, initializer=init, shape=weights.shape) 63 return var 64 65 66 def weight_variable(shape, stddev=0.02, name=None): 67 # print(shape) 68 initial = tf.truncated_normal(shape, stddev=stddev) 69 if name is None: 70 return tf.Variable(initial) 71 else: 72 return tf.get_variable(name, initializer=initial) 73 74 75 def bias_variable(shape, name=None): 76 initial = tf.constant(0.0, shape=shape) 77 if name is None: 78 return tf.Variable(initial) 79 else: 80 return tf.get_variable(name, initializer=initial) 81 82 83 def get_tensor_size(tensor): 84 from operator import mul 85 return reduce(mul, (d.value for d in tensor.get_shape()), 1) 86 87 88 def conv2d_basic(x, W, bias): 89 conv = tf.nn.conv2d(x, W, strides=[1, 1, 1, 1], padding="SAME") 90 return tf.nn.bias_add(conv, bias) 91 92 93 def conv2d_strided(x, W, b): 94 conv = tf.nn.conv2d(x, W, strides=[1, 2, 2, 1], padding="SAME") 95 return tf.nn.bias_add(conv, b) 96 97 98 def conv2d_transpose_strided(x, W, b, output_shape=None, stride = 2): 99 # print x.get_shape() 100 # print W.get_shape() 101 if output_shape is None: 102 output_shape = x.get_shape().as_list() 103 output_shape[1] *= 2 104 output_shape[2] *= 2 105 output_shape[3] = W.get_shape().as_list()[2] 106 # print output_shape 107 conv = tf.nn.conv2d_transpose(x, W, output_shape, strides=[1, stride, stride, 1], padding="SAME") 108 return tf.nn.bias_add(conv, b) 109 110 111 def leaky_relu(x, alpha=0.0, name=""): 112 return tf.maximum(alpha * x, x, name) 113 114 115 def max_pool_2x2(x): 116 return tf.nn.max_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="SAME") 117 118 119 def avg_pool_2x2(x): 120 return tf.nn.avg_pool(x, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="SAME") 121 122 123 def local_response_norm(x): 124 return tf.nn.lrn(x, depth_radius=5, bias=2, alpha=1e-4, beta=0.75) 125 126 127 def batch_norm(x, n_out, phase_train, scope='bn', decay=0.9, eps=1e-5): 128 """ 129 Code taken from http://stackoverflow.com/a/34634291/2267819 130 """ 131 with tf.variable_scope(scope): 132 beta = tf.get_variable(name='beta', shape=[n_out], initializer=tf.constant_initializer(0.0) 133 , trainable=True) 134 gamma = tf.get_variable(name='gamma', shape=[n_out], initializer=tf.random_normal_initializer(1.0, 0.02), 135 trainable=True) 136 batch_mean, batch_var = tf.nn.moments(x, [0, 1, 2], name='moments') 137 ema = tf.train.ExponentialMovingAverage(decay=decay) 138 139 def mean_var_with_update(): 140 ema_apply_op = ema.apply([batch_mean, batch_var]) 141 with tf.control_dependencies([ema_apply_op]): 142 return tf.identity(batch_mean), tf.identity(batch_var) 143 144 mean, var = tf.cond(phase_train, 145 mean_var_with_update, 146 lambda: (ema.average(batch_mean), ema.average(batch_var))) 147 normed = tf.nn.batch_normalization(x, mean, var, beta, gamma, eps) 148 return normed 149 150 151 def process_image(image, mean_pixel): 152 return image - mean_pixel 153 154 155 def unprocess_image(image, mean_pixel): 156 return image + mean_pixel 157 158 159 def bottleneck_unit(x, out_chan1, out_chan2, down_stride=False, up_stride=False, name=None): 160 """ 161 Modified implementation from github ry?! 162 """ 163 164 def conv_transpose(tensor, out_channel, shape, strides, name=None): 165 out_shape = tensor.get_shape().as_list() 166 in_channel = out_shape[-1] 167 kernel = weight_variable([shape, shape, out_channel, in_channel], name=name) 168 shape[-1] = out_channel 169 return tf.nn.conv2d_transpose(x, kernel, output_shape=out_shape, strides=[1, strides, strides, 1], 170 padding='SAME', name='conv_transpose') 171 172 def conv(tensor, out_chans, shape, strides, name=None): 173 in_channel = tensor.get_shape().as_list()[-1] 174 kernel = weight_variable([shape, shape, in_channel, out_chans], name=name) 175 return tf.nn.conv2d(x, kernel, strides=[1, strides, strides, 1], padding='SAME', name='conv') 176 177 def bn(tensor, name=None): 178 """ 179 :param tensor: 4D tensor input 180 :param name: name of the operation 181 :return: local response normalized tensor - not using batch normalization :( 182 """ 183 return tf.nn.lrn(tensor, depth_radius=5, bias=2, alpha=1e-4, beta=0.75, name=name) 184 185 in_chans = x.get_shape().as_list()[3] 186 187 if down_stride or up_stride: 188 first_stride = 2 189 else: 190 first_stride = 1 191 192 with tf.variable_scope('res%s' % name): 193 if in_chans == out_chan2: 194 b1 = x 195 else: 196 with tf.variable_scope('branch1'): 197 if up_stride: 198 b1 = conv_transpose(x, out_chans=out_chan2, shape=1, strides=first_stride, 199 name='res%s_branch1' % name) 200 else: 201 b1 = conv(x, out_chans=out_chan2, shape=1, strides=first_stride, name='res%s_branch1' % name) 202 b1 = bn(b1, 'bn%s_branch1' % name, 'scale%s_branch1' % name) 203 204 with tf.variable_scope('branch2a'): 205 if up_stride: 206 b2 = conv_transpose(x, out_chans=out_chan1, shape=1, strides=first_stride, name='res%s_branch2a' % name) 207 else: 208 b2 = conv(x, out_chans=out_chan1, shape=1, strides=first_stride, name='res%s_branch2a' % name) 209 b2 = bn(b2, 'bn%s_branch2a' % name, 'scale%s_branch2a' % name) 210 b2 = tf.nn.relu(b2, name='relu') 211 212 with tf.variable_scope('branch2b'): 213 b2 = conv(b2, out_chans=out_chan1, shape=3, strides=1, name='res%s_branch2b' % name) 214 b2 = bn(b2, 'bn%s_branch2b' % name, 'scale%s_branch2b' % name) 215 b2 = tf.nn.relu(b2, name='relu') 216 217 with tf.variable_scope('branch2c'): 218 b2 = conv(b2, out_chans=out_chan2, shape=1, strides=1, name='res%s_branch2c' % name) 219 b2 = bn(b2, 'bn%s_branch2c' % name, 'scale%s_branch2c' % name) 220 221 x = b1 + b2 222 return tf.nn.relu(x, name='relu') 223 224 225 def add_to_regularization_and_summary(var): 226 if var is not None: 227 tf.summary.histogram(var.op.name, var) 228 tf.add_to_collection("reg_loss", tf.nn.l2_loss(var)) 229 230 231 def add_activation_summary(var): 232 if var is not None: 233 tf.summary.histogram(var.op.name + "/activation", var) 234 tf.summary.scalar(var.op.name + "/sparsity", tf.nn.zero_fraction(var)) 235 236 237 def add_gradient_summary(grad, var): 238 if grad is not None: 239 tf.summary.histogram(var.op.name + "/gradient", grad)
read_MITSceneParsingData.py
1 import numpy as np 2 import os 3 import random 4 from six.moves import cPickle as pickle 5 from tensorflow.python.platform import gfile 6 import glob 7 8 import TensorflowUtils as utils 9 10 # DATA_URL = 'http://sceneparsing.csail.mit.edu/data/ADEChallengeData2016.zip' 11 DATA_URL = 'http://data.csail.mit.edu/places/ADEchallenge/ADEChallengeData2016.zip' 12 13 14 def read_dataset(data_dir): 15 pickle_filename = "MITSceneParsing.pickle" 16 pickle_filepath = os.path.join(data_dir, pickle_filename) 17 # if not os.path.exists(pickle_filepath): 18 # utils.maybe_download_and_extract(data_dir, DATA_URL, is_zipfile=True) # 不存在文件 则下载 19 SceneParsing_folder = os.path.splitext(DATA_URL.split("/")[-1])[0] 20 result = create_image_lists(r"F:\pyProgram\FCN_test\Data_zoo\MIT_SceneParsing\ADEChallengeData2016\ADEChallengeData2016") 21 print ("Pickling ...") 22 with open(pickle_filepath, 'wb') as f: 23 pickle.dump(result, f, pickle.HIGHEST_PROTOCOL) 24 # else: 25 print ("Found pickle file!") 26 27 with open(pickle_filepath, 28 'rb') as f: 29 # 打开pickle文件 30 result = pickle.load(f) 31 training_records = result['training'] 32 validation_records = result['validation'] 33 del result 34 35 return training_records, validation_records 36 37 38 def create_image_lists(image_dir): 39 if not gfile.Exists(image_dir): 40 print("Image directory '" + image_dir + "' not found.") 41 return None 42 directories = ['training', 'validation'] 43 image_list = {} 44 45 for directory in directories: # 训练集和验证集 分别制作 46 file_list = [] 47 image_list[directory] = [] 48 49 # 获取images目录下所有的图片名 50 file_glob = os.path.join(image_dir, "images", directory, '*.' + 'jpg') 51 file_list.extend(glob.glob(file_glob)) # 加入文件列表 包含所有图片文件全路径+文件名字 如 Data_zoo/MIT_SceneParsing/ADEChallengeData2016/images/training/hi.jpg 52 53 if not file_list: 54 print('No files found') 55 else: 56 for f in file_list: # 扫描文件列表 这里f对应文件全路径 57 filename = os.path.splitext(f.split("\\")[-1])[0] 58 annotation_file = os.path.join(image_dir, "annotations", directory, filename + '.png') 59 if os.path.exists(annotation_file): 60 record = {'image': f, 'annotation': annotation_file, 'filename': filename} 61 image_list[directory].append(record) 62 else: 63 print("Annotation file not found for %s - Skipping" % filename) 64 65 random.shuffle(image_list[directory]) # 对图片列表进行洗牌 66 no_of_images = len(image_list[directory]) 67 print('No. of %s files: %d' % (directory, no_of_images)) 68 69 return image_list
BatchDatsetReader.py
1 """ 2 Code ideas from https://github.com/Newmu/dcgan and tensorflow mnist dataset reader 3 """ 4 import numpy as np 5 import scipy.misc as misc 6 import imageio 7 8 class BatchDatset: 9 files = [] 10 images = [] 11 annotations = [] 12 image_options = {} 13 batch_offset = 0 14 epochs_completed = 0 15 16 def __init__(self, records_list, image_options={}): 17 """ 18 Intialize a generic file reader with batching for list of files 19 :param records_list: list of file records to read - 20 sample record: {'image': f, 'annotation': annotation_file, 'filename': filename} 21 :param image_options: A dictionary of options for modifying the output image 22 Available options: 23 resize = True/ False 24 resize_size = #size of output image - does bilinear resize 25 color=True/False 26 """ 27 print("Initializing Batch Dataset Reader...") 28 print(image_options) 29 self.files = records_list 30 self.image_options = image_options 31 self._read_images() 32 33 def _read_images(self): 34 self.__channels = True 35 # 读取训练集图像 36 self.images = np.array([self._transform(filename['image']) for filename in self.files]) 37 self.__channels = False 38 # 读取label的图像,由于label图像是二维的,这里需要扩展为三维 39 self.annotations = np.array( 40 [np.expand_dims(self._transform(filename['annotation']), axis=3) for filename in self.files]) 41 print (self.images.shape) 42 print (self.annotations.shape) 43 44 45 def _transform(self, filename): 46 image = imageio.imread(filename) 47 if self.__channels and len(image.shape) < 3: # make sure images are of shape(h,w,3) 48 image = np.array([image for i in range(3)]) 49 50 if self.image_options.get("resize", False) and self.image_options["resize"]: 51 resize_size = int(self.image_options["resize_size"]) 52 resize_image = misc.imresize(image, 53 [resize_size, resize_size], interp='nearest') 54 else: 55 resize_image = image 56 57 return np.array(resize_image) 58 59 def get_records(self): 60 return self.images, self.annotations 61 62 def reset_batch_offset(self, offset=0): 63 self.batch_offset = offset 64 65 def next_batch(self, batch_size): 66 start = self.batch_offset 67 # 当前第几个batch 68 self.batch_offset += batch_size 69 # 读取下一个batch 所有offset偏移量+batch_size 70 if self.batch_offset > self.images.shape[0]: 71 # 如果下一个batch的偏移量超过了图片总数说明完成了一个epoch 72 self.epochs_completed += 1 # epochs完成总数+1 73 print("****************** Epochs completed: " + str(self.epochs_completed) + "******************") 74 # Shuffle the data 75 perm = np.arange(self.images.shape[0]) 76 # arange生成数组(0 - len-1) 获取图片索引 77 np.random.shuffle(perm) # 对图片索引洗牌 78 self.images = self.images[perm] # 洗牌之后的图片顺序 79 self.annotations = self.annotations[perm] # 下一个epoch从0开始 80 # Start next epoch 81 start = 0 82 self.batch_offset = batch_size # 已完成的batch偏移量 83 end = self.batch_offset # 开始到结束self.batch_offset self.batch_offset+batch_size 84 return self.images[start:end], self.annotations[start:end] # 取出batch 85 def get_random_batch(self, batch_size): 86 # 按照一个batch_size一个块,进行对所有图片总数进行随机操作,相当于洗牌工作 87 indexes = np.random.randint(0, self.images.shape[0], size=[batch_size]).tolist() 88 return self.images[indexes], self.annotations[indexes]
遇到的问题及解决办法:
scipy.misc模块中imread函数以失效,用imageio.imread代替
scipy模块版本与pillow版本不匹配,需将scipy降到1.2.1版本,才能和 pillow6.0.0以上版本相容
(https://www.lfd.uci.edu/~gohlke/pythonlibs/网址中最低版本1.3.0, 所以采用pip install scipy==1.2.1方式安装即可)
读取pickle文件时,判断文件是否存在的函数出现问题,不存在也会自动创建 所以无论存不存在都会判断为存在,此处为找到好的解决办法,只能不做判 断,载入数据集时是不包含pickle文件,所以根据数据集直接生成
Windows操作系统和Linux文件路径表示方式不一样,Windows是‘\’,Linux是‘/’
本周的进度就是这些。
马上就要开学了,下一周会重点复习UML和java,加油!