- 论文阅读笔记——MAGICDRIVE: STREET VIEW GENERATION WITH DIVERSE 3D GEOMETRY CONTROL
寻丶幽风
论文阅读笔记论文阅读笔记3d人工智能自动驾驶
MagicDrive论文MagicDrive通过对3D数据和文本数据的多模态条件融合和隐式视角转换,实现了高质量、多视角一致的3D场景生成。几何条件编码Cross-attention:针对顺序数据,适合处理文本标记和边界框等可变长度输入。Additiveencoderbranch:对于地图等网络状规则数据,能够有效保留空间结构。对于文本按照模版构建:“Adrivingsceneat{locatio
- 转 C# .NET4.0 混合模式程序集异常
weixin_30516243
1.引用Microsoft.DirectX.dll和Microsoft.DirectX.Directsound.dll这2个文件。2.项目属性里边,把目标平台改成X86。3.App.Config修改下:123456在.NET4.0下使用Dirext3D托管库,出现“混合模式程序集是针对“v1.1.4322”版的运行时生成的,在没有配置其他信息的情况下,无法在4.0运行时中加载该程序集。”异常信息,
- MariaDB 和 MySQL 版本关联
java我跟你拼了
数据库笔记mariadbmysql数据库数据库篇版本关联
MariaDB和MySQL是两个常用的关系型数据库管理系统(RDBMS),它们在很多方面非常相似,因为MariaDB是MySQL的一个分支。MariaDB和MySQL之间的版本关联可以通过以下几个方面来理解:1.历史背景MySQL:MySQL是一个开源的数据库管理系统,由MySQLAB开发,后来被SunMicrosystems收购,再之后被Oracle收购。MariaDB:MariaDB是MySQ
- ASP.NET Web的 Razor Pages应用,配置热重载,解决.NET Core MVC 页面在更改后不刷新
坐望云起
开发语言asp.net前端后端RazorPagesmvc.netcore
RazorPages应用,修改页面查看修改效果,如果没有热重载,改一句话跑一次,这个活就没法干了。1、VS2022中的NuGet中安装RuntimeCompilationMicrosoft.AspNetCore.Mvc.Razor.RuntimeCompilation需要配套你的.netsdk版本,我这里用的是6.0,所以这个也用了6.0.0。2、找到你的Properties\launchSett
- Java:从入门到创新
java
Java:从入门到创新一、Java简介Java是一种广泛使用的高级编程语言,自1995年首次发布以来,一直深受开发者的喜爱。它由SunMicrosystems公司开发,后来被Oracle公司收购。Java的设计目标是简单、健壮、安全且跨平台,这些特性使其在企业级应用开发中占据重要地位。二、Java的主要特点(一)简单易学Java的语法与C语言和C++语言很接近,但丢弃了C++中一些复杂且容易出错的
- facefusion AI换脸软件的本地部署过程记录
kfrealme
人工智能
tags:AI驾驭facefusion我的环境Win10+N卡安装步骤安装Python3.10方案手动安装Python官网下载安装包安装PythonReleasesforWindows|Python.org我的蓝奏云分享https://www.lanzoub.com/i9La81s1o5gb密码:h17b命令行安装1以管理员身份打开「命令提示符」2删除Microsoft官方源wingetsourc
- 超详细Python教程——初识Python
月流霜
python数据库服务器
初识Python温馨提示:2018年创建这个仓库的时候,关于Python语言基础这个部分的内容写得相对是比较粗糙,对粗学者可能不是那么友好。如果你正好是一名初学者,建议你移步到我的另一个仓库Python-for-Freshmen-2023,这个仓库对初学者更加友好,对应的内容,大家也可以在我的知乎专栏“从零开始学Python”中找到,点击进入传送门。Python简介Python的历史1989年圣诞
- C# 调用 VITS,推理模型 将文字转wav音频调试 -数字人分支
未来之窗软件服务
c#开发语言人工智能数字人
Microsoft.ML.OnnxRuntime.OnnxRuntimeException:[ErrorCode:InvalidArgument]Inputname:'input_name'isnotinthemetadata在Microsoft.ML.OnnxRuntime.InferenceSession.LookupInputMetadata(StringnodeName)位置D:\a\_w
- python --桌面开发pyqt安装(mac 环境)
Xiao_Qiang_
python
纪录下,在安装pyqt的时候花了些时间,现在纪录下参考http://www.noktec.be/python/how-to-install-pyqt4-on-osx步骤DownloadtheSIPpackage(snapshotforOSx)DownloadthePyQtpackage(snapshotforOSx)DownloadQtInstallQtInstallSIPInstallPyQta
- Excel-to-JSON 2.1.0: Your Privacy-First Excel Add-in for JSON Conversion
wtsolutions
excel与json互相转换exceljson
IntroductionExcel-to-JSONisapowerfulMicrosoftExceladd-inthatseamlesslyconvertsExceldataintoJSONformat.Version2.1.0bringsenhancedfeatureswhilemaintainingourcommitmenttodataprivacyandcross-platformacces
- 初识HTTP
思考的橙子
后端http网络协议网络
HTTP概念:HyperTextTransferProtocol,超文本传输协议,规定了浏览器和服务器之间数据传输的规则HTTP协议特点:1.基于TCP协议:面向连接,安全2.基于请求-响应模型的:一次请求对应一次响应3.HTTP协议是无状态的协议:对于事务处理没有记忆能力。每次请求-响应都是独立的。缺点:多次请求间不能共享数据。优点:速度快HTTP-请求数据格式请求数据分为3部分:1.请求行:请
- jmeter中,上传文件的MIME类型
小han的日常
jmeterjmeter
text/plain:用于纯文本文件,如.txt文件。text/html:用于HTML文档,即.html文件。application/msword:MicrosoftWord文档,即.doc和.docx文件。image/jpeg:JPEG图像,对应.jpg和.jpeg文件。image/png:PNG图像,对应.png文件。image/gif:GIF图像,对应.gif文件。
- Python预训练模型实现俄语音频转文字
啥都鼓捣的小yao
人工智能python音视频人工智能
Python预训练模型实现俄语音频转文字使用CommonVoice8.0、Golos和MultilingualTEDx的训练和验证分割对俄语的facebook/wav2vec2-xls-r-1b进行了微调。使用此模型时,请确保您的语音输入以16kHz采样。我们只需要装好三个功能包,写好你的文件路径即可使用!importtorchimportlibrosafromtransformersimport
- RK3568平台(音频篇)音频ALSA框架
嵌入式_笔记
瑞芯微音视频
一.ALSA框架简介ALSA表示先进linux声音架构(AdvancedLinuxSoundArchiecture),它由一系列的内核驱动、应用程序编程接口(API)以及支持linux下声音的应用程序组成、ALSA项目发起的原有是linux下的声卡驱动(OSS)没有获得积极的维护,而且落后于新的声卡技术。JaroslavKysela早先写了一个声卡驱动,并由此开始了ALSA项目,随后,更多的开发者
- Python程序设计(入门)
xyyykx
python开发语言
目录一丶Python概述二丶Python数据类型三丶常用的进制四丶字符串型五丶程序控制结构六丶组合数据类型一丶Python概述Python是一种高级编程语言,由GuidovanRossum于1991年开发并发布。它具有简洁、易读、易学的语法特点,被广泛应用于多个领域,包括软件开发、数据科学、人工智能、网络编程等。以下是Python的一些主要特点和优势:简单易学:Python的语法简洁明了,易于理解
- 使用 Selenium 控制现有 Edge 窗口以规避爬虫检测
秋叶原の黑猫
数据库
在网络爬虫开发中,网站的防爬机制常常会检测自动化工具(如Selenium)启动的浏览器实例。为了绕过这种检测,一种有效的方法是利用Selenium连接到手动打开的现有浏览器窗口,而不是每次都启动一个新的实例。本文将详细介绍如何使用Selenium控制现有的MicrosoftEdge浏览器窗口,并结合代码示例展示实现过程。1.背景介绍:为什么需要控制现有窗口?传统的Selenium脚本会通过WebD
- MSE分类时梯度消失的问题详解和交叉熵损失的梯度推导
阿正的梦工坊
MachineLearningDeepLearning分类人工智能深度学习机器学习
下面是MSE不适合分类任务的解释,包含梯度推导。以及交叉熵的梯度推导。前文请移步笔者的另一篇博客:大模型训练为什么选择交叉熵损失(Cross-EntropyLoss):均方误差(MSE)和交叉熵损失的深入对比MSE分类时梯度消失的问题详解我们深入探讨MSE(均方误差)的梯度特性,结合公式推导和分析,解释为什么在预测值接近0或1时梯度趋于0,以及这背后的含义。我会尽量保持清晰且严谨,适合高理论水平的
- CMake、CMakeLists.txt、Makefile、Make、GNU、gcc、g++
進擊的L酱
MakefilegccLinuxgnuunixc++笔记
CMake、CMakeLists.txt、Makefile、Make、GNU、gcc、g++CMakeCMakeLists.txtMakefileMakeGNUGCC(GNUCompilerCollection)gcc/g++CMakeCMake(crossplatfrommake)是一个跨平台的编译工具,可以用简单的语句来描述所有平台的编译过程。它能够输出各种各样的makefile或者proje
- ROS开发疑难杂症持续更新
流浪的567
ROS机器人c++
一、Eigen相关1、fatalerror:Eigen/Dense:没有那个文件或目录4|#include|^~~~~~~~~~~~~1.1、安装Eigensudoapt-getinstalllibeigen3-dev1.2、检查Eigen头文件是否存在于/usr/include/eigen3/或/usr/local/include/目录下ls/usr/include/eigen3/Eigen#应
- C++小游戏——迷宫探险
Duke369rose
C++c++算法开发语言小游戏
一个C++小游戏,编译和运行耗时都有点长,麻烦大神提点建议。联系邮箱:
[email protected]文件见文章顶部代码#include#include#include#include//定义迷宫单元格类型enumCellType{WALL,PATH,START,END,TREASURE};//迷宫类classMaze{public:Maze(intwidth,intheigh
- Spring AOP相关常见问题
PXM的算法星球
Java后端springjava数据库
前言在日常开发中,我们经常需要给方法添加一些横切关注点(Cross-CuttingConcerns),比如日志记录、事务管理、权限控制等。而SpringAOP(Aspect-OrientedProgramming,面向切面编程)提供了一种优雅的方式,让我们可以在不修改业务代码的情况下增强方法行为。1.AOP和OOP的区别是什么?许多初学者会疑惑,OOP(面向对象编程)已经很好地组织了代码,为什么还
- chokidar - chokidar 初识(初识案例演示、初识案例解读、初识案例测试)
我命由我12345
Node.js简化库编程node.jsjsjavascript前端框架前端npmhtml5
一、chokidar1、chokidar概述chokidar是一个用于监视文件系统变化的Node.js库chokidar提供了一种简单、高效的方式来监视文件和目录的创建、修改、删除等操作chokidar是是fs.watch和fs.watchFile方法的增强版,解决了它们在一些平台上的不一致性和局限性2、chokidar的特点跨平台的支持:chokidar在Windows、Linux、macOS上
- 稳定运行的以Microsoft Azure Cosmos DB数据库为数据源和目标的ETL性能变差时提高性能方法和步骤
weixin_30777913
microsoftazure数据仓库etl性能优化
在以MicrosoftAzureCosmosDB数据库为数据源和目标的ETL(提取、转换、加载)过程中,性能变差时,可能有多种原因。提高以MicrosoftAzureCosmosDB为数据源和目标的ETL性能,通常涉及数据库配置、查询优化、并发执行、数据传输优化和使用CosmosDB特性等多个方面。通过以下方法和步骤,可以显著改善ETL性能:增加RU设置、优化分区策略;优化查询、使用批量操作;提高
- 【ROS实战】02-ROS架构介绍
卓有成效的程序员
ROSROS机器人人工智能
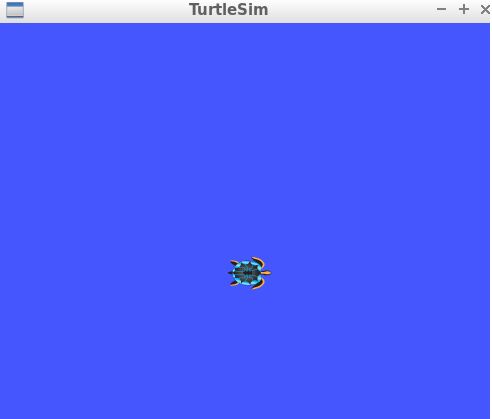
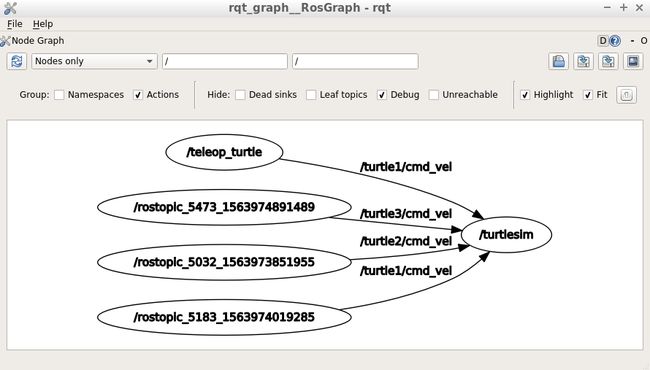
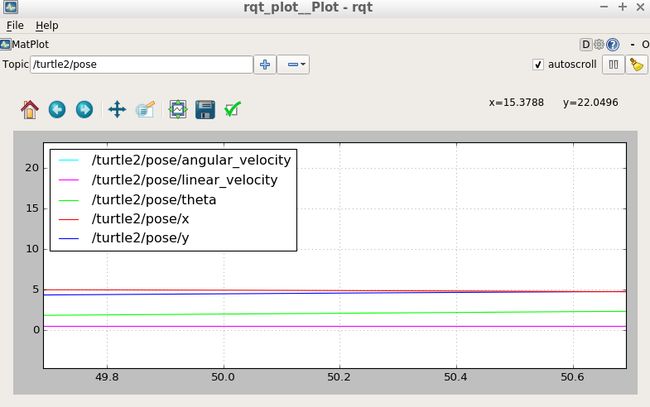
1.简介你是否曾有过这样的疑问:我按照文档安装了ROS,依照要求写了一些示例节点(node)、消息(msg)和话题(topic),但觉得过程既麻烦又繁琐。也许你开始怀疑:为什么需要ROS?它到底帮我解决了什么问题?本文将通过一个简单的例子,介绍ROS的架构,阐明它解决了哪些问题,以及它如何帮助我们简化开发流程。2.移动案例假设我们要编写一个能够控制机器人移动的程序。随着程序的增多,我们需要进行模块
- 稳定运行的以Microsoft Azure SQL database数据库为数据源和目标的ETL性能变差时提高性能方法和步骤
weixin_30777913
etlazureetl云计算数据库
在以MicrosoftAzureSQLDatabase为数据源和目标的ETL(Extract,Transform,Load)过程中,性能问题可能会随着数据量的增加、查询复杂度的提升或系统负载的加重而逐渐变差。提高以MicrosoftAzureSQLDatabase为数据源和目标的ETL性能需要综合考虑数据库查询优化、数据加载策略、并行处理、资源管理等方面。通过合适的索引、查询优化、批量处理、增量加
- 【论文解读】DSVP:通过动态扩展实现快速探索的双阶段视点规划器
Travis.X
论文解读自动驾驶动态规划人工智能
标题:DSVP:Dual-StageViewpointPlannerforRapidExplorationbyDynamicExpansion作者:HongbiaoZhu,ChaoCao,YukunXia,SebastianScherer,JiZhang,andWeidongWang来源:https://frc.ri.cmu.edu/~zhangji/publications/IROS_2021.
- Kotlin的inline、noinline和crossinline关键字
我们间的空白格
androidkotlinandroid
一、inlineinline翻译成中文的意思就是内联,在kotlin里面inline被用来修饰函数,表明当前函数在编译时是以内嵌的形式进行编译的,从而减少了一层函数调用栈:inlinefunfun1(){Log.i("tag","1")}//调用funmainFun(){fun1()}//实际编译的代码funmainFun(){Log.i("tag","1")}这样写的一点好处就是调用栈会明显变浅
- kotlin - inline、noinline、crossinline使用
六毛六66
Kotlin例子kotlinandroid
kotlin-inline、noinline、crossinline使用inline内联函数:用inline关键字标记的函数,避免函数调用的开销,消除Lambda带来的运行时开销noinline禁止内联:一个高阶函数接收了两个或者更多的函数类型的参数,就用加上inline。如果只想内联一个函数,另一个函数就要用noinlinecrossinline:使用crossinline防止非局部返回,关键字
- Microsoft Visual C++ Redistributable 各版本安装包合集
Eric Woo X
C++Windowsmicrosoftc++开发语言
MicrosoftVisualC++Redistributable2019x86:https://aka.ms/vs/16/release/VC_redist.x86.exex64:https://aka.ms/vs/16/release/VC_redist.x64.exeMicrosoftVisualC++Redistributable2017x86:https://go.microsoft.c
- Kotlin内联函数inline、noinline、crossinline
hc.Geng
kotlin开发语言android
高阶函数首先来看下kotlin里的高阶函数定义:如果一个函数接收另一个函数作为参数,或返回类型是一个函数类型,那么该函数被称为是高阶函数。比如下面的代码:privatefunhighFuc(name:String,block:(String)->Unit){block(name)}其中highFuc是函数名,函数中传入了2个参数,第一个参数为String类型,第二个参数即是函数类型,->左边的部分
- java类加载顺序
3213213333332132
java
package com.demo;
/**
* @Description 类加载顺序
* @author FuJianyong
* 2015-2-6上午11:21:37
*/
public class ClassLoaderSequence {
String s1 = "成员属性";
static String s2 = "
- Hibernate与mybitas的比较
BlueSkator
sqlHibernate框架ibatisorm
第一章 Hibernate与MyBatis
Hibernate 是当前最流行的O/R mapping框架,它出身于sf.net,现在已经成为Jboss的一部分。 Mybatis 是另外一种优秀的O/R mapping框架。目前属于apache的一个子项目。
MyBatis 参考资料官网:http:
- php多维数组排序以及实际工作中的应用
dcj3sjt126com
PHPusortuasort
自定义排序函数返回false或负数意味着第一个参数应该排在第二个参数的前面, 正数或true反之, 0相等usort不保存键名uasort 键名会保存下来uksort 排序是对键名进行的
<!doctype html>
<html lang="en">
<head>
<meta charset="utf-8&q
- DOM改变字体大小
周华华
前端
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/1999/xhtml&q
- c3p0的配置
g21121
c3p0
c3p0是一个开源的JDBC连接池,它实现了数据源和JNDI绑定,支持JDBC3规范和JDBC2的标准扩展。c3p0的下载地址是:http://sourceforge.net/projects/c3p0/这里可以下载到c3p0最新版本。
以在spring中配置dataSource为例:
<!-- spring加载资源文件 -->
<bean name="prope
- Java获取工程路径的几种方法
510888780
java
第一种:
File f = new File(this.getClass().getResource("/").getPath());
System.out.println(f);
结果:
C:\Documents%20and%20Settings\Administrator\workspace\projectName\bin
获取当前类的所在工程路径;
如果不加“
- 在类Unix系统下实现SSH免密码登录服务器
Harry642
免密ssh
1.客户机
(1)执行ssh-keygen -t rsa -C "
[email protected]"生成公钥,xxx为自定义大email地址
(2)执行scp ~/.ssh/id_rsa.pub root@xxxxxxxxx:/tmp将公钥拷贝到服务器上,xxx为服务器地址
(3)执行cat
- Java新手入门的30个基本概念一
aijuans
javajava 入门新手
在我们学习Java的过程中,掌握其中的基本概念对我们的学习无论是J2SE,J2EE,J2ME都是很重要的,J2SE是Java的基础,所以有必要对其中的基本概念做以归纳,以便大家在以后的学习过程中更好的理解java的精髓,在此我总结了30条基本的概念。 Java概述: 目前Java主要应用于中间件的开发(middleware)---处理客户机于服务器之间的通信技术,早期的实践证明,Java不适合
- Memcached for windows 简单介绍
antlove
javaWebwindowscachememcached
1. 安装memcached server
a. 下载memcached-1.2.6-win32-bin.zip
b. 解压缩,dos 窗口切换到 memcached.exe所在目录,运行memcached.exe -d install
c.启动memcached Server,直接在dos窗口键入 net start "memcached Server&quo
- 数据库对象的视图和索引
百合不是茶
索引oeacle数据库视图
视图
视图是从一个表或视图导出的表,也可以是从多个表或视图导出的表。视图是一个虚表,数据库不对视图所对应的数据进行实际存储,只存储视图的定义,对视图的数据进行操作时,只能将字段定义为视图,不能将具体的数据定义为视图
为什么oracle需要视图;
&
- Mockito(一) --入门篇
bijian1013
持续集成mockito单元测试
Mockito是一个针对Java的mocking框架,它与EasyMock和jMock很相似,但是通过在执行后校验什么已经被调用,它消除了对期望 行为(expectations)的需要。其它的mocking库需要你在执行前记录期望行为(expectations),而这导致了丑陋的初始化代码。
&nb
- 精通Oracle10编程SQL(5)SQL函数
bijian1013
oracle数据库plsql
/*
* SQL函数
*/
--数字函数
--ABS(n):返回数字n的绝对值
declare
v_abs number(6,2);
begin
v_abs:=abs(&no);
dbms_output.put_line('绝对值:'||v_abs);
end;
--ACOS(n):返回数字n的反余弦值,输入值的范围是-1~1,输出值的单位为弧度
- 【Log4j一】Log4j总体介绍
bit1129
log4j
Log4j组件:Logger、Appender、Layout
Log4j核心包含三个组件:logger、appender和layout。这三个组件协作提供日志功能:
日志的输出目标
日志的输出格式
日志的输出级别(是否抑制日志的输出)
logger继承特性
A logger is said to be an ancestor of anothe
- Java IO笔记
白糖_
java
public static void main(String[] args) throws IOException {
//输入流
InputStream in = Test.class.getResourceAsStream("/test");
InputStreamReader isr = new InputStreamReader(in);
Bu
- Docker 监控
ronin47
docker监控
目前项目内部署了docker,于是涉及到关于监控的事情,参考一些经典实例以及一些自己的想法,总结一下思路。 1、关于监控的内容 监控宿主机本身
监控宿主机本身还是比较简单的,同其他服务器监控类似,对cpu、network、io、disk等做通用的检查,这里不再细说。
额外的,因为是docker的
- java-顺时针打印图形
bylijinnan
java
一个画图程序 要求打印出:
1.int i=5;
2.1 2 3 4 5
3.16 17 18 19 6
4.15 24 25 20 7
5.14 23 22 21 8
6.13 12 11 10 9
7.
8.int i=6
9.1 2 3 4 5 6
10.20 21 22 23 24 7
11.19
- 关于iReport汉化版强制使用英文的配置方法
Kai_Ge
iReport汉化英文版
对于那些具有强迫症的工程师来说,软件汉化固然好用,但是汉化不完整却极为头疼,本方法针对iReport汉化不完整的情况,强制使用英文版,方法如下:
在 iReport 安装路径下的 etc/ireport.conf 里增加红色部分启动参数,即可变为英文版。
# ${HOME} will be replaced by user home directory accordin
- [并行计算]论宇宙的可计算性
comsci
并行计算
现在我们知道,一个涡旋系统具有并行计算能力.按照自然运动理论,这个系统也同时具有存储能力,同时具备计算和存储能力的系统,在某种条件下一般都会产生意识......
那么,这种概念让我们推论出一个结论
&nb
- 用OpenGL实现无限循环的coverflow
dai_lm
androidcoverflow
网上找了很久,都是用Gallery实现的,效果不是很满意,结果发现这个用OpenGL实现的,稍微修改了一下源码,实现了无限循环功能
源码地址:
https://github.com/jackfengji/glcoverflow
public class CoverFlowOpenGL extends GLSurfaceView implements
GLSurfaceV
- JAVA数据计算的几个解决方案1
datamachine
javaHibernate计算
老大丢过来的软件跑了10天,摸到点门道,正好跟以前攒的私房有关联,整理存档。
-----------------------------华丽的分割线-------------------------------------
数据计算层是指介于数据存储和应用程序之间,负责计算数据存储层的数据,并将计算结果返回应用程序的层次。J
&nbs
- 简单的用户授权系统,利用给user表添加一个字段标识管理员的方式
dcj3sjt126com
yii
怎么创建一个简单的(非 RBAC)用户授权系统
通过查看论坛,我发现这是一个常见的问题,所以我决定写这篇文章。
本文只包括授权系统.假设你已经知道怎么创建身份验证系统(登录)。 数据库
首先在 user 表创建一个新的字段(integer 类型),字段名 'accessLevel',它定义了用户的访问权限 扩展 CWebUser 类
在配置文件(一般为 protecte
- 未选之路
dcj3sjt126com
诗
作者:罗伯特*费罗斯特
黄色的树林里分出两条路,
可惜我不能同时去涉足,
我在那路口久久伫立,
我向着一条路极目望去,
直到它消失在丛林深处.
但我却选了另外一条路,
它荒草萋萋,十分幽寂;
显得更诱人,更美丽,
虽然在这两条小路上,
都很少留下旅人的足迹.
那天清晨落叶满地,
两条路都未见脚印痕迹.
呵,留下一条路等改日再
- Java处理15位身份证变18位
蕃薯耀
18位身份证变15位15位身份证变18位身份证转换
15位身份证变18位,18位身份证变15位
>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
蕃薯耀 201
- SpringMVC4零配置--应用上下文配置【AppConfig】
hanqunfeng
springmvc4
从spring3.0开始,Spring将JavaConfig整合到核心模块,普通的POJO只需要标注@Configuration注解,就可以成为spring配置类,并通过在方法上标注@Bean注解的方式注入bean。
Xml配置和Java类配置对比如下:
applicationContext-AppConfig.xml
<!-- 激活自动代理功能 参看:
- Android中webview跟JAVASCRIPT中的交互
jackyrong
JavaScripthtmlandroid脚本
在android的应用程序中,可以直接调用webview中的javascript代码,而webview中的javascript代码,也可以去调用ANDROID应用程序(也就是JAVA部分的代码).下面举例说明之:
1 JAVASCRIPT脚本调用android程序
要在webview中,调用addJavascriptInterface(OBJ,int
- 8个最佳Web开发资源推荐
lampcy
编程Web程序员
Web开发对程序员来说是一项较为复杂的工作,程序员需要快速地满足用户需求。如今很多的在线资源可以给程序员提供帮助,比如指导手册、在线课程和一些参考资料,而且这些资源基本都是免费和适合初学者的。无论你是需要选择一门新的编程语言,或是了解最新的标准,还是需要从其他地方找到一些灵感,我们这里为你整理了一些很好的Web开发资源,帮助你更成功地进行Web开发。
这里列出10个最佳Web开发资源,它们都是受
- 架构师之面试------jdk的hashMap实现
nannan408
HashMap
1.前言。
如题。
2.详述。
(1)hashMap算法就是数组链表。数组存放的元素是键值对。jdk通过移位算法(其实也就是简单的加乘算法),如下代码来生成数组下标(生成后indexFor一下就成下标了)。
static int hash(int h)
{
h ^= (h >>> 20) ^ (h >>>
- html禁止清除input文本输入缓存
Rainbow702
html缓存input输入框change
多数浏览器默认会缓存input的值,只有使用ctl+F5强制刷新的才可以清除缓存记录。
如果不想让浏览器缓存input的值,有2种方法:
方法一: 在不想使用缓存的input中添加 autocomplete="off";
<input type="text" autocomplete="off" n
- POJO和JavaBean的区别和联系
tjmljw
POJOjava beans
POJO 和JavaBean是我们常见的两个关键字,一般容易混淆,POJO全称是Plain Ordinary Java Object / Pure Old Java Object,中文可以翻译成:普通Java类,具有一部分getter/setter方法的那种类就可以称作POJO,但是JavaBean则比 POJO复杂很多, Java Bean 是可复用的组件,对 Java Bean 并没有严格的规
- java中单例的五种写法
liuxiaoling
java单例
/**
* 单例模式的五种写法:
* 1、懒汉
* 2、恶汉
* 3、静态内部类
* 4、枚举
* 5、双重校验锁
*/
/**
* 五、 双重校验锁,在当前的内存模型中无效
*/
class LockSingleton
{
private volatile static LockSingleton singleton;
pri