如果带着问题去学习binder又是怎样的呢?
1. 第一个binder线程 Binder:PID_1是怎样创建的
在App进程创建的时候
nativeZygoteInit
-> com_android_internal_os_RuntimeInit_nativeZygoteInit
-> onZygoteInit
-> ProcessState
-> startThreadPool()
-> spawnPooledThread(true)
isMain=true
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
String8 name = makeBinderThreadName(); //这里是第一个binder 线程,也就是binder主线程
sp t = new PoolThread(isMain); //生成一个线程
t->run(name.string()); //线程运行,不停的调用theadLoop
}
}
virtual bool threadLoop()
{
IPCThreadState* ptr = IPCThreadState::self();
if (ptr) {
ptr->joinThreadPool(mIsMain);
}
return false; //threadLoop返回false表示会退出线程,即线程结束了
}
void IPCThreadState::joinThreadPool(bool isMain)
{
// mOut是写入内核的数据,如果是Main Binder线程,则发送 BC_ENTER_LOOPER
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
do {
processPendingDerefs(); //处理引用计数
result = getAndExecuteCommand(); //获得命令并执行
//异常退出
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
abort();
}
//如果timeout了,但如果不是 Main Binder线程也就是非 Binder:xxx_1线程就直接退出
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
//通知binder驱动 线程要退出了
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}
在 binder_thread_write 中会有对 BC_ENTER_LOOPER的处理, 如下所示,thread是指binder_thread,也就是当前线程的描述符, 将BINDER_LOOPER_STATE_ENTERED保存到 binder_thread的looper变量里.
looper变量主要保存的binder线程的一种状态如
- BINDER_LOOPER_STATE_REGISTERED
标记该binder线程是非主binder线程 - BINDER_LOOPER_STATE_ENTERED
标记该binder线程是主binder线程 - BINDER_LOOPER_STATE_EXITED
标记该binder线程马上就要退出了 - BINDER_LOOPER_STATE_INVALID
标记是无效的,但是这个并没有实际用处,一般是 原来是主线程,然后用户态又通过主线程发送了BC_REGISTER_LOOPER,就会标志 INVALID, 同理与REGISTER一样 - BINDER_LOOPER_STATE_WAITING
标记当前binder线程正在等着client的请求 - BINDER_LOOPER_STATE_NEED_RETURN
这个标志,是当前新线程下来在生成binder_thread里置位的,表示该binder线程在处理完transaction后需要返回到用户态。
case BC_ENTER_LOOPER:
if (thread->looper & BINDER_LOOPER_STATE_REGISTERED) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
binder_user_error("%d:%d ERROR: BC_ENTER_LOOPER called after BC_REGISTER_LOOPER\n",
proc->pid, thread->pid);
}
thread->looper |= BINDER_LOOPER_STATE_ENTERED;
break;
从上面可知,startThreadPool就是创建APP进程的binder线程池模型, 它也会创建第一个binder主线程,该线程不会退出(非 critcal错误),而spawnPooledThread函数用于创建一个普通的binder线程,这些线程都有可能会退出。
二、 一个APP里最多能有多少个binder线程呢? 其它binder线程是怎么创建的,由谁创建的呢?
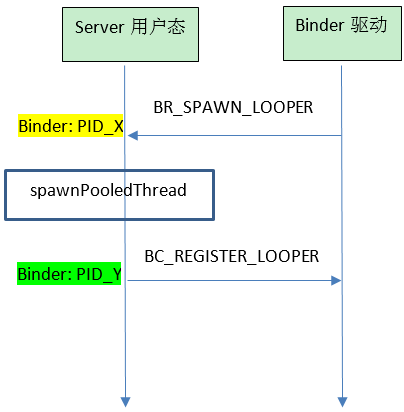
从第一节可知,只要调用 spawnPooledThread()函数就创建了一个binder线程,因此从代码上来看除了第一个主binder线程由APP用户态主动创建外,其它的都是由Binder驱动主动向APP申请创建,也就是说binder线程的创建是看binder驱动是否很繁忙(这里的繁忙是与本进程相关的),来决定是否需要向APP进程申请创建,也就是APP进程被动创建。
2.1 Server端
其实也很好理解,binder最终的通信包括client和server双方。server方并不知道什么时候会有client的请求,client的有请求,它就直接丢给binder驱动,然后由binder驱动根据当前server的能力(是否有多余线程去处理)去看下是否需要新的线程来处理client的请求。
那试问一个 Server端 App 最多同时能跑多少个binder线程呢?
这个问题,可以简单的测试一下,写一个Service, 然后实现一个API里死循环sleep, 反正就是不返回, 另一个client在创建多个非UI线程去请求API, 然后再dump出来,就知道最多支持多少个binder线程了。
我们从 spawnPooledThread的调用函数来看就知道能有多少个binder线程了。
IPCThreadState::executeCommand(int32_t cmd) {
case BR_SPAWN_LOOPER:
mProcess->spawnPooledThread(false);
break;
}
executeCommand函数执行从Binder 驱动传递到 BR_SPAWN_LOOPER, 这时就得继续从binder驱动中去找 BR_SPAWN_LOOPER了。
static int binder_thread_read(...)
...
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
/*spawn a new thread if we leave this out */) {
proc->requested_threads++;
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
binder_stat_br(proc, thread, BR_SPAWN_LOOPER);
}
}
在binder_thread_read调用的最后,就会有可能去spawn一个线程, 但是也是有条件的, 且要同时满足才行
binder_proc -> ready_threads = 0
ready_threads表明当前进程中还没有准备好的线程, 换句话说,当前binder线程都有各自的任务在处理, 没空接受新的任务了。binder_proc -> requested_threads = 0
如果 reqeusted_threads >0 表明 binder_driver已经通过其它binder线程请求APP进程去创建binder线程来处理任务的路上了, 所以啊,binder驱动就不会再通知一次了,因为如果再通知一次,那么就会创建两个binder线程,资源浪费嘛。
所以如果 requested_threads = 0,如果其它条件满足,那就由我这个binder线程就请求APP去创建另一个binder线程proc->requested_threads_started < proc->max_threads
max_threads: 这个是APP进程通知binder驱动我这个APP进程当前最多只能创建max_threads个线程,如果我已经创建这么多了,不要再通知我去创建了。至于别人(其它APP)想要获得我的服务或其它,别急,取号等着,等着我的binder线程不忙了再去处理。thread->looper & (BINDER_LOOPER_STATE_REGISTERED |BINDER_LOOPER_STATE_ENTERED
looper保存着当前线程的一些状态,BINDER_LOOPER_STATE_REGISTERED(非主Binder线程)|BINDER_LOOPER_STATE_ENTERED(主binder线程) 这两个是binder线程的标志. 即: Binder驱动只有通过我的APP创建的(有效的)binder线程才有资格向我(APP)提出创建其它binder线程.
好了,上面4个条件同时满足了,就通知APP创建一个新的 binder线程了。
但还有几个问题
binder_proc->max_threads最大是多少呢?
在ProcessState.cpp的 open_driver 函数中, 会设置一个默认的最大binder线程数 DEFAULT_MAX_BINDER_THREADS = 15;
但是BinderInternal.java也提供了setMaxThreads去修改Binder驱动中的max_threads值. 比如system_server就设置了max_threads为31
注意 : BinderInternal是internal的类,APP不能直接调用。ready_threads 这个是什么意思呢?
在binder_thread_read函数中
static int binder_thread_read(..) {
//wait_for_proc_work表示是否需要去等着proc的任务,当然前提是这个binder线程没有任务可做了,
//那这个binder线程就可以向进程申请去处理进程的其它任务了
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
if (wait_for_proc_work)
proc->ready_threads++; //表明当前进程又多了一个可用的binder线程去接受任务了
if (wait_for_proc_work) {
//等着整个进程的任务
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
//等着binder线程本身的任务
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
...
//代码运行到这里就表明有任务了,那么我这个binder线程就要去接受任务去做了,
if (wait_for_proc_work)
//既然我已经开始去处理任务了,那么整个进程当前就少了我一个可用的线程啦
proc->ready_threads--;
...
done:
//决定是否再创建一个新的binder线程
*consumed = ptr - buffer;
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
proc->requested_threads++; //请求创建线程+1
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
binder_stat_br(proc, thread, BR_SPAWN_LOOPER);
}
}
- requested_threads与requested_threads_started
requested_threads表示要请求创建的线程数,在上面决定创建binder线程后,该值会+1
而requested_threads_started表示当前进程已经启动吧这么多个线程,
APP接收到创建新的binder线程的请求后就会调用spawnPooledThread(false)去创建一个非Main的binder线程, 而最后又会通过joinThreadPool触发binder驱动的BC_REGISTER_LOOPER
static int binder_thread_write(...) {
case BC_REGISTER_LOOPER:
if (thread->looper & BINDER_LOOPER_STATE_ENTERED) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
} else if (proc->requested_threads == 0) {
thread->looper |= BINDER_LOOPER_STATE_INVALID;
} else {
//正常情况会进入该分支
proc->requested_threads--; //要请求创建的binder线程数减1
proc->requested_threads_started++; //启动过的线程数+1
}
thread->looper |= BINDER_LOOPER_STATE_REGISTERED;
break;
2.2 client
client端作为请求端,是从用户态下发起请求的,所以client一般是自己申请创建线程,然后在线程里去请求 server端的服务,这里不会涉及到binder线程。
那么client就只有一个默认的主binder线程了么?当然不是,从2.1可知,binder驱动会不管是server,还是client, 都会默认有一个空闲线程,所以client的主binder线程在binder_thread_read的最后发现当前没有可ready的线程,这时就通知client端创建一个binder线程。所以一般client有两个binder线程。
三、Server的binder线程阻塞在哪里了?
人第二节可知道,Server端的binder线程会一直等着client的请求,即如果没有客户端请求时,binder线程应该是一直阻塞着的,那么Server端等在什么地方呢?
来看下binder线程的运行过程便可知, 第一小节已经贴出相关代码了, 再帖一次,
void IPCThreadState::joinThreadPool(bool isMain)
{
// mOut是写入内核的数据,如果是Main Binder线程,则发送 BC_ENTER_LOOPER
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
do {
processPendingDerefs(); //处理引用计数
result = getAndExecuteCommand(); //获得命令并执行
//异常退出
if (result < NO_ERROR && result != TIMED_OUT && result != -ECONNREFUSED && result != -EBADF) {
abort();
}
//如果timeout了,但如果不是 Main Binder线程也就是非 Binder:xxx_1线程就直接退出
if(result == TIMED_OUT && !isMain) {
break;
}
} while (result != -ECONNREFUSED && result != -EBADF);
//通知binder驱动 线程要退出了
mOut.writeInt32(BC_EXIT_LOOPER);
talkWithDriver(false);
}
从joinThreadPool里,有一个getAndExecuteCommand, 来看下这个函数干了些什么吧
status_t IPCThreadState::getAndExecuteCommand()
{
status_t result;
int32_t cmd;
result = talkWithDriver();
if (result >= NO_ERROR) {
size_t IN = mIn.dataAvail();
if (IN < sizeof(int32_t)) return result; //异常处理
cmd = mIn.readInt32(); //获得从Binder驱动返回来的BR_ 号
...
result = executeCommand(cmd); //开始执行相关命令
...
}
return result;
}
该函数很简单,从binder驱动里拿到client要操作的CMD, 然后调用executeCommand执行CMD。
在看 talkWithDriver 之前,先来看下 binder_write_read

binder_write_read是一个结构体,它主要作用是告诉binder驱动我这次请求的目的是什么,一是read, 另一个就是write,
- write_size > 0 表明需要往binder驱动写write_buffer的数据
- read_size >0 表明需要往binder驱动读数据放到write_buffer的数据
- write_consumed 表明已经写入了多少字节
- read_consumed 表明读入了多少字节
- write_buffer 指向用户态下的数据地址,其实也就是IPCThreadState里的mOut (Parcel)里的mData地址
- read_buffer 指向用户态下的数据地址,其实也就是IPCThreadState里的mIn (Parcel)里的mData地址
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
binder_write_read bwr;
//mIn.dataPosition()是当前mIn中mData的指针,
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
//doReceive默认为true, needRead为true表明还需要从Binder驱动中读取数据,这时候就不能往binder驱动中写数据
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
//填充写数据的相关字段
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
//填充读数据相关字段
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
// Return immediately if there is nothing to do.
if ((bwr.write_size == 0) && (bwr.read_size == 0)) return NO_ERROR;
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
#if defined(__ANDROID__)
//阻塞式的调用 binder_ioctl
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
else
err = -errno;
#else
err = INVALID_OPERATION;
#endif
if (mProcess->mDriverFD <= 0) {
err = -EBADF;
}
} while (err == -EINTR);
if (err >= NO_ERROR) {
if (bwr.write_consumed > 0) {
//根据写了多少数据,来更新mOut的相关数据
if (bwr.write_consumed < mOut.dataSize())
mOut.remove(0, bwr.write_consumed);
else
mOut.setDataSize(0);
}
if (bwr.read_consumed > 0) {
//根据读了多少数据,来更新mIn的相关数据
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
return NO_ERROR;
}
return err;
}
3.1 binder线程第一次调用 binder_ioctl
我们来看下binder线程创建后第一次调用 binder_ioctl 的情况
从joinThreadPool可以看出, 会写入一个 BC_REGISTER_LOOPER
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
因此此时binder_write_read的结构如下所示
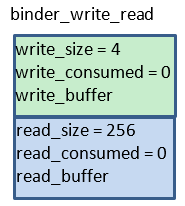
来看下binder驱动是怎么处理的呢
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
// binder_stop_on_user_error默认为0,只有条件为false的时候才会一直block在这,所以这里并不会block
ret = wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
binder_lock(__func__);
//创建一个与binder线程相关的binder_thread, 第一次创建会设置thread->looper |= BINDER_LOOPER_STATE_NEED_RETURN
thread = binder_get_thread(proc);
switch (cmd) {
case BINDER_WRITE_READ: //执行BINDER_WRITE_READ命令
ret = binder_ioctl_write_read(filp, cmd, arg, thread);
break;
...
}
ret = 0;
err:
if (thread) //这里取消BINDER_LOOPER_STATE_NEED_RETURN
thread->looper &= ~BINDER_LOOPER_STATE_NEED_RETURN;
binder_unlock(__func__);
wait_event_interruptible(binder_user_error_wait, binder_stop_on_user_error < 2);
err_unlocked:
return ret;
}
其中BINDER_LOOPER_STATE_NEED_RETURN这个非常重要,就是这个标志,决定了binder线程第一次的走向,如果是第一次进来, binder_thread->looper都设置了该标志,而该binder_ioctl返回时,会将该标志取消
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
//获得用户态的 binder_write_read
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
if (bwr.write_size > 0) {
//有数据要写入,这里就是 BC_REGISTER_LOOPER
ret = binder_thread_write(proc, thread, bwr.write_buffer,
bwr.write_size, &bwr.write_consumed);
}
if (bwr.read_size > 0) {
//有数据要读取
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size, &bwr.read_consumed, filp->f_flags & O_NONBLOCK);
//如果进程描述结构体中有任务要做时,唤醒等在binder_proc->wait的列表
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
}
//将数据拷贝到用户态
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
}
out:
return ret;
}
binder线程第一次调用binder_ioctl也就是写入一个BC_REGISTER_LOOPER, 所以 binder_thread_write只是将binder_thread->looper设置一个BINDER_LOOPER_STATE_REGISTERED
现在来看下binder_thread_read
static int binder_thread_read(...)
{
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
int ret = 0;
int wait_for_proc_work;
//第一次进来 consumed为0,所以进入该分支, 会返回一个 BR_NOOP
if (*consumed == 0) {
if (put_user(BR_NOOP, (uint32_t __user *)ptr)) return -EFAULT;
ptr += sizeof(uint32_t);
}
retry:
//binder线程第一次进来,没有transaction任务,也没有其它任务,所以waite_for_proc_work为true
wait_for_proc_work = thread->transaction_stack == NULL &&
list_empty(&thread->todo);
thread->looper |= BINDER_LOOPER_STATE_WAITING;
if (wait_for_proc_work)
proc->ready_threads++; //线程可用
binder_unlock(__func__);
if (wait_for_proc_work) { //进入该分支
if (non_block) {
if (!binder_has_proc_work(proc, thread))
ret = -EAGAIN;
} else
//如果binder_has_proc_work为false,将会一直等在这里,直到被唤醒
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
} else {
if (non_block) {
if (!binder_has_thread_work(thread))
ret = -EAGAIN;
} else
ret = wait_event_freezable(thread->wait, binder_has_thread_work(thread));
}
binder_lock(__func__);
if (wait_for_proc_work)
proc->ready_threads--; //线程接收到任务,准备执行了
thread->looper &= ~BINDER_LOOPER_STATE_WAITING;
if (ret)
return ret;
while (1) {
uint32_t cmd;
struct binder_transaction_data tr;
struct binder_work *w;
struct binder_transaction *t = NULL;
if (!list_empty(&thread->todo)) { //无任务
w = list_first_entry(&thread->todo, struct binder_work, entry);
} else if (!list_empty(&proc->todo) && wait_for_proc_work) { //无任务
w = list_first_entry(&proc->todo, struct binder_work, entry);
} else {
/* no data added */
if (ptr - buffer == 4 &&
!(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN))
goto retry;
break; //直接break到
}
if (end - ptr < sizeof(tr) + 4)
break;
switch(...) {}
}
done:
//决定是否要向用户态申请创建一个新的线程
*consumed = ptr - buffer;
if (proc->requested_threads + proc->ready_threads == 0 &&
proc->requested_threads_started < proc->max_threads &&
(thread->looper & (BINDER_LOOPER_STATE_REGISTERED |
BINDER_LOOPER_STATE_ENTERED)) /* the user-space code fails to */
/*spawn a new thread if we leave this out */) {
proc->requested_threads++;
if (put_user(BR_SPAWN_LOOPER, (uint32_t __user *)buffer))
return -EFAULT;
binder_stat_br(proc, thread, BR_SPAWN_LOOPER);
}
return 0;
}
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
现在来看下wait_event_freezable_exclusive, 该函数的条件如果为true,即表明binder有任务时,就不会阻塞,而是直接执行,binder线程第一次进来的时候(因为binder线程的创建是防止后续有请求到来,所以当前是没有任务的), 当前没有任务的话,binder线程应该一直等着呀,为什么这里没有阻塞式的等呢?
static int binder_has_proc_work(struct binder_proc *proc, struct binder_thread *thread)
{
return !list_empty(&proc->todo) ||
(thread->looper & BINDER_LOOPER_STATE_NEED_RETURN);
}
哦,原来binder_has_proc_work会判断如果binder线程是第一次进来的话,也就是设置了BINDER_LOOPER_STATE_NEED_RETURN,也就是表明该线程不管你有没有任务,我都需要返回到用户态,所以这里为true, 也就不会等待了。
所以第一次返回给用户态时,只返回一个 BR_NOOP, 表示无操作
3.2 binder线程第二次调用 binder_ioctl
3.1 节,mOut已经写完数据了,

这里write_size=0, read_size 依然是 256,
只不过第二次进入binder_ioctl后, binder_thread->looper已经没有了BINDER_LOOPER_STATE_NEED_RETURN
所以binder_has_proc_work就会返回false, 然后binder线程就这样一直阻塞式的阻塞了。
整个过程如下

四、Server端的binder线程是怎么被唤醒的呢?
由第三节知道 Server端的binder线程一直阻塞在 binder_thread_read 这个函数的中的, 也就是
ret = wait_event_freezable_exclusive(proc->wait, binder_has_proc_work(proc, thread));
注意wait_event_freezable_exclusive是一个排他的等待队列,当唤醒该等待队列时,只会唤醒第一个。
对应的binder线程要被唤醒,那么就找下哪里 wake up了 proc->wait就知道了。
下面来看几种正常的情况
4.1 被其它进程(binder_proc)唤醒
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
...
if (target_thread) { //一般这里为false
e->to_thread = target_thread->pid;
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
} else { //取得的是进程上的todo等待列表
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
...
list_add_tail(&t->work.entry, target_list);
if (target_wait) //唤醒
wake_up_interruptible(target_wait);
...
}
当client进程需要获得server端的服务时,如调用一个"server端的API函数", 最终binder驱动会找到server的binder_proc,也就是代码中的target_proc, 接着client将要请求server的相关数据加入到server的等待队列中,也就是target_list, 最后通过wake_up_interruptible唤醒server线程来处理client的请求。

注意,这里只会唤醒一个binder线程(因为睡眠时是wait_event_freezable_exclusive)
4.2 被自己唤醒
4.1节会唤醒一个binder线程去执行客户端的请求,来看下server端客户线程会唤醒后做了什么操作
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg, struct binder_thread *thread)
{
...
if (bwr.write_size > 0) {
...
}
if (bwr.read_size > 0) {
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,&bwr.read_consumed,filp->f_flags & O_NONBLOCK);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
}
...
}
当server有一个binder线程被唤醒了,这时binder线程就会返回到用户态去执行相关操作,在返回之前, binder线程又会检查是否现在binder驱动比较繁忙,也就是是否还有其它的客户端请求,如果还有,那么当前binder线程触发唤醒server进程上的等待的其它binder线程。
也就是说,当有binder线程被唤醒时,binder线程就可能会唤醒其它的binder线程尽量将当前等待着的请求执行完。
4.3 binder死亡通知
如linkToDeath, 这里不讨论这种情况。
五、client是怎么找到server端在binder驱动中的binder_proc的呢?
在4.1节binder_transaction,client通过找到target_proc,然后就唤醒了server端的binder线程,那么这个target_proc是怎么来的呢?
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply)
{
struct binder_proc *target_proc;
if (reply) { //reply在 BC_TRANACTION时为false
} else { //进入else分支
if (tr->target.handle) { //如果handle不为0,则进入下面的分支
struct binder_ref *ref;
ref = binder_get_ref(proc, tr->target.handle, true);
//通过handle在当前binder_proc中获得target的binder_ref, 也就是binder_node的引用
target_node = ref->node; //通过引用获得target binder node
} else { //如果handle为0的话进入else分支
target_node = binder_context_mgr_node; //这个是固定的ServiceManager
}
target_proc = target_node->proc;
}
if (target_thread) {
} else {
target_list = &target_proc->todo;
target_wait = &target_proc->wait;
}
...
}
哦,原来是通过 handle 这个整形数来获得的target binder proc. 那这个handle又是什么呢? 从上面看出是binder_transaction_data里面的handle,

而整个transact传递流程如下

从代码上来看
status_t BpBinder::transact(uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
这个handle是BpBinder里的mHandle,
那么问题来了,BpBinder里的mHandle又是怎么初始化的呢