Simple_marker
源码
/*
* Copyright (c) 2011, Willow Garage, Inc.
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
* * Neither the name of the Willow Garage, Inc. nor the names of its
* contributors may be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE
* ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF
* SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS
* INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN
* CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE)
* ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
* POSSIBILITY OF SUCH DAMAGE.
*/
// %Tag(fullSource)%
#include
#include
void processFeedback(
const visualization_msgs::InteractiveMarkerFeedbackConstPtr &feedback )
{
ROS_INFO_STREAM( feedback->marker_name << " is now at "
<< feedback->pose.position.x << ", " << feedback->pose.position.y
<< ", " << feedback->pose.position.z );
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "simple_marker");
// create an interactive marker server on the topic namespace simple_marker
interactive_markers::InteractiveMarkerServer server("simple_marker");
// create an interactive marker for our server
visualization_msgs::InteractiveMarker int_marker;
int_marker.header.frame_id = "base_mk";
int_marker.header.stamp=ros::Time::now();
int_marker.name = "my_marker";
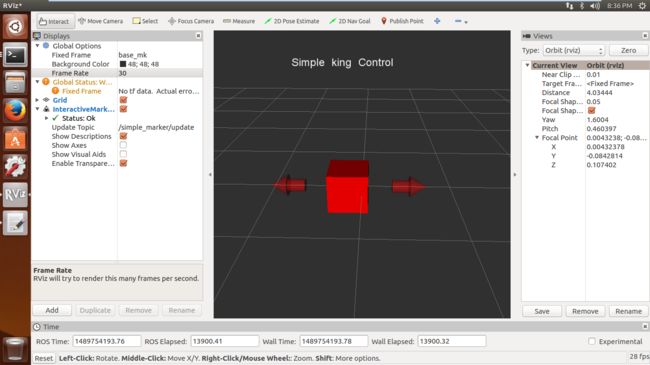
int_marker.description = "Simple king Control";
// create a grey box marker
visualization_msgs::Marker box_marker;
box_marker.type = visualization_msgs::Marker::CUBE;
box_marker.scale.x = 0.45;
box_marker.scale.y = 0.45;
box_marker.scale.z = 0.45;
box_marker.color.r = 1.0;
box_marker.color.g = 0.0;
box_marker.color.b = 0.0;
box_marker.color.a = 1.0;
// create a non-interactive control which contains the box
visualization_msgs::InteractiveMarkerControl box_control;
box_control.always_visible = true;
box_control.markers.push_back( box_marker );
// add the control to the interactive marker
int_marker.controls.push_back( box_control );
// create a control which will move the box
// this control does not contain any markers,
// which will cause RViz to insert two arrows
visualization_msgs::InteractiveMarkerControl rotate_control;
rotate_control.name = "move_x";
rotate_control.interaction_mode =
visualization_msgs::InteractiveMarkerControl::MOVE_AXIS;
// add the control to the interactive marker
int_marker.controls.push_back(rotate_control);
// add the interactive marker to our collection &
// tell the server to call processFeedback() when feedback arrives for it
server.insert(int_marker, &processFeedback);
// 'commit' changes and send to all clients
server.applyChanges();
// start the ROS main loop
ros::spin();
}
// %Tag(fullSource)%
分析
#include
#include
首先包含了头文件,主要是包含了
void processFeedback(
const visualization_msgs::InteractiveMarkerFeedbackConstPtr &feedback )
{
ROS_INFO_STREAM( feedback->marker_name << " is now at "
<< feedback->pose.position.x << ", " << feedback->pose.position.y
<< ", " << feedback->pose.position.z );
}
这个在运行的时候就可以看出,是返回交互信息的。
主函数里:
ros::init(argc, argv, "simple_marker");
ros初始化。
interactive_markers::InteractiveMarkerServer server("simple_marker");
首先建立一个服务器,它负责把所有改动告知rviz.
visualization_msgs::InteractiveMarker int_marker;
int_marker.header.frame_id = "base_mk";
int_marker.header.stamp=ros::Time::now();
int_marker.name = "my_marker";
int_marker.description = "Simple king Control";
创建一个交互式marker——int_marker;定义了它的frame_id什么的。
visualization_msgs::Marker box_marker;
box_marker.type = visualization_msgs::Marker::CUBE;
box_marker.scale.x = 0.45;
box_marker.scale.y = 0.45;
box_marker.scale.z = 0.45;
box_marker.color.r = 1.0;
box_marker.color.g = 0.0;
box_marker.color.b = 0.0;
box_marker.color.a = 1.0;
这个只是个方块,用来包含我们的交互式marker,好有个外形。下面的设定前面都见过。我现在知道的也不多,有新的理解再来补充。
visualization_msgs::InteractiveMarkerControl box_control;
box_control.always_visible = true;
box_control.markers.push_back( box_marker );
这个是非交互式控制,是为了在移动方块时仍然能显示方块。最后一句,把这个控制块添加到了前面建的方块marker box_marker上。应该是把方块添加到了这个控制上。
int_marker.controls.push_back( box_control );
又把非交互式控制添加到了交互的marker上。
visualization_msgs::InteractiveMarkerControl rotate_control;
rotate_control.name = "move_x";
rotate_control.interaction_mode =
visualization_msgs::InteractiveMarkerControl::MOVE_AXIS;
又创建了一个交互,用来移动方块,最后一句,是创建两个箭头来移动。
int_marker.controls.push_back(rotate_control);
把这个控制也添加给交互式marker。
server.insert(int_marker, &processFeedback);
把int_marker添加到了服务器的收集器,并且让服务器在有feedback到来的时候调用反馈函数。
server.applyChanges();
服务器提交改变并发送到所有的客户端。
ros::spin();
开启ROS主循环
总结
整个交互式的marker分为以下几部分:
- 交互式部分:就是交互式marker的主体,所有的其他部分都要添加到它上面来,组成一个交互式主体,它的信息也就是主体信息。
- Marker部分:这个是显示的主体,相当于是个外包装。
- non-control部分:它是用来承载marker部分的。
我原本想把中间一段程序改成这样:
// create a non-interactive control which contains the box
//visualization_msgs::InteractiveMarkerControl box_control;
//box_control.always_visible = true;
//box_control.markers.push_back( box_marker );
// add the control to the interactive marker
//int_marker.controls.push_back( box_control );
int_marker.markers.push_back( box_marker );
结果发现int_marker没有markers这个属性,所以需要一个non-control。
- 一个control,这个control就是用来控制可交互marker的
最后,将marker注册到服务器的collection,服务器会监视它的状态,它有什么改变,都会被通告服务器调用processFeedback
然后使服务器将改变发送到所有客户端。