在人工的全连接神经网络中,每相邻两层之间的每个神经元之间都是有边相连的。当输入层的特征维度变得很高时,这时全连接网络需要训练的参数就会增大很多,计算速度就会变得很慢,例如一张黑白的 28×28 的手写数字图片,输入层的神经元就有784个,如下图所示:
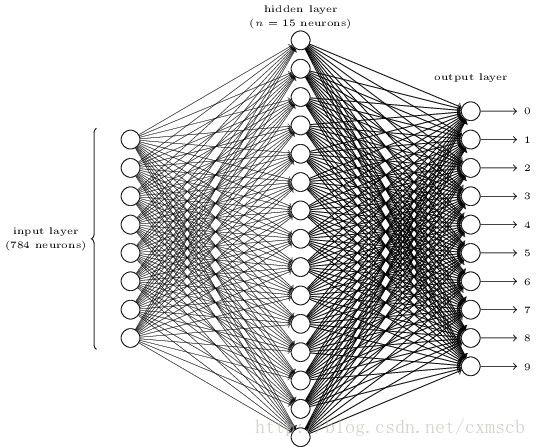
若在中间只使用一层隐藏层,参数 w 就有 784×15=11760 多个;若输入的是28×28 带有颜色的RGB格式的手写数字图片,输入神经元就有28×28×3=2352 个…… 。这很容易看出使用全连接神经网络处理图像中的需要训练参数过多的问题。
而在卷积神经网络(Convolutional Neural Network,CNN)中,卷积层的神经元只与前一层的部分神经元节点相连,即它的神经元间的连接是非全连接的,且同一层中某些神经元之间的连接的权重 w 和偏移 b 是共享的(即相同的),这样大量地减少了需要训练参数的数量。
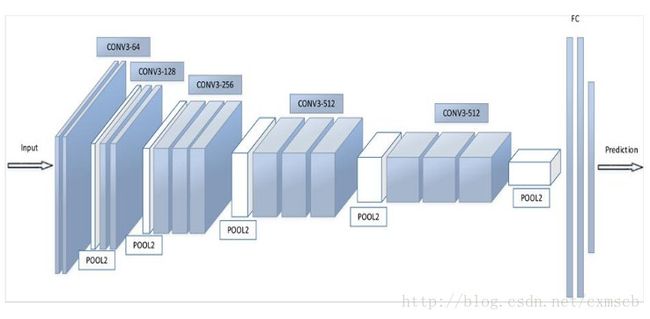
卷积神经网络CNN的结构一般包含这几个层:
● 输入层:用于数据的输入
● 卷积层:使用卷积核进行特征提取和特征映射
● 激励层:由于卷积也是一种线性运算,因此需要增加非线性映射
● 池化层:进行下采样,对特征图稀疏处理,减少数据运算量。
● 全连接层:通常在CNN的尾部进行重新拟合,减少特征信息的损失
● 输出层:用于输出结果
当然中间还可以使用一些其他的功能层:
● 归一化层(Batch Normalization):在CNN中对特征的归一化
● 切分层:对某些(图片)数据的进行分区域的单独学习
● 融合层:对独立进行特征学习的分支进行融合
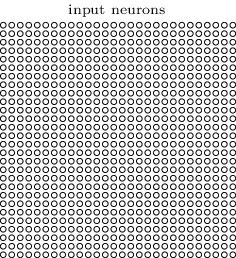
对于黑白的 28×28 的图片,CNN的输入是一个 28×28 的的二维神经元,如下图所示:
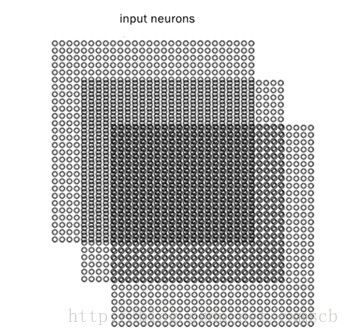
而对于RGB格式的28×28图片,CNN的输入则是一个 3×28×28 的三维神经元(RGB中的每一个颜色通道都有一个 28×28 的矩阵),如下图所示:
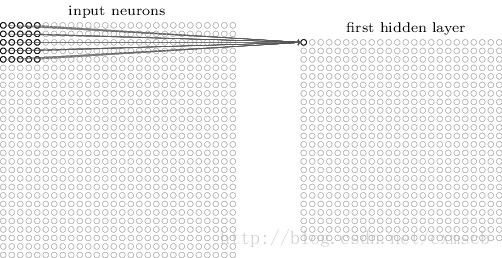
假设输入的是一个 28×28 的的二维神经元,我们定义5×5 的 一个 local receptive fields(感受视野),即 隐藏层的神经元与输入层的5×5个神经元相连,这个5*5的区域就称之为Local Receptive Fields,如下图所示:
设移动的步长为1:从左到右扫描,每次移动 1 格,扫描完之后,再向下移动一格,再次从左到右扫描。
具体过程如动图所示:
strides=[1, x_move,y_move, 1], padding='SAME'/'VALID'
步长为1,padding为same时,输出大小是不变的
import sys
print(sys.version)
'''
3.5.3 |Continuum Analytics, Inc.| (default, May 15 2017, 10:43:23) [MSC v.1900 64 bit (AMD64)]
'''
import tensorflow as tf
from tensorflow.examples.tutorials.mnist import input_data
# number 1 to 10 data
mnist = input_data.read_data_sets('MNIST_data', one_hot=True)
def compute_accuracy(v_xs, v_ys):
global prediction
y_pre = sess.run(prediction, feed_dict={xs: v_xs, keep_prob: 1})
correct_prediction = tf.equal(tf.argmax(y_pre,1), tf.argmax(v_ys,1))
accuracy = tf.reduce_mean(tf.cast(correct_prediction, tf.float32))
result = sess.run(accuracy, feed_dict={xs: v_xs, ys: v_ys, keep_prob: 1})
return result
def weight_variable(shape):
#产生随机数 mean是均值,stddev是标准差
initial = tf.truncated_normal(shape, stddev=0.1)
return tf.Variable(initial)
def bias_variable(shape):
initial = tf.constant(0.1, shape=shape)#shape 矩阵形状,几行几列
return tf.Variable(initial)
def conv2d(x, W):
# stride [1, x_movement, y_movement, 1]
# Must have strides[0] = strides[3] = 1
#定义卷积,tf.nn.conv2d函数是tensoflow里面的二维的卷积函数,x是图片的所有参数,W是此卷积层的权重,然后定义步长strides=[1,1,1,1]值,
# strides[0]和strides[3]的两个1是默认值,中间两个1代表padding时在x方向运动一步,y方向运动一步,padding采用的方式是SAME。
return tf.nn.conv2d(x, W, strides=[1, 1, 1, 1], padding='SAME')
def max_pool_2x2(x):
# stride [1, x_movement, y_movement, 1]
#接着定义池化pooling,为了得到更多的图片信息,padding时我们选的是一次一步,也就是strides[1]=strides[2]=1,这样得到的图片尺寸没有变化,
# 而我们希望压缩一下图片也就是参数能少一些从而减小系统的复杂度,因此我们采用pooling来稀疏化参数,也就是卷积神经网络中所谓的下采样层。
# pooling 有两种,一种是最大值池化,一种是平均值池化,本例采用的是最大值池化tf.max_pool()。池化的核函数大小为2x2,因此ksize=[1,2,2,1],步长为2,因此strides=[1,2,2,1]:
return tf.nn.max_pool(x, ksize=[1,2,2,1], strides=[1,2,2,1], padding='SAME')
# define placeholder for inputs to network
xs = tf.placeholder(tf.float32, [None, 784]) # 28x28
ys = tf.placeholder(tf.float32, [None, 10])
keep_prob = tf.placeholder(tf.float32)
#我们需要处理我们的xs,把xs的形状变成[-1,28,28,1],-1代表先不考虑输入的图片例子多少这个维度,
# 后面的1是channel的数量,因为我们输入的图片是黑白的,因此channel是1,例如如果是RGB图像,那么channel就是3。
x_image = tf.reshape(xs, [-1, 28, 28, 1])
# print(x_image.shape) # [n_samples, 28,28,1]
## conv1 layer ##
#卷积核patch的大小是5x5,因为黑白图片channel是1所以输入是1,输出是32个featuremap
W_conv1 = weight_variable([5,5, 1,32]) # patch 5x5, in size 1, out size 32
b_conv1 = bias_variable([32])
h_conv1 = tf.nn.relu(conv2d(x_image, W_conv1) + b_conv1) # output size 28x28x32
h_pool1 = max_pool_2x2(h_conv1) # output size 14x14x32
## conv2 layer ##
W_conv2 = weight_variable([5,5, 32, 64]) # patch 5x5, in size 32, out size 64
b_conv2 = bias_variable([64])
h_conv2 = tf.nn.relu(conv2d(h_pool1, W_conv2) + b_conv2) # output size 14x14x64
h_pool2 = max_pool_2x2(h_conv2) # output size 7x7x64
## fc1 layer ##
W_fc1 = weight_variable([7*7*64, 1024])
b_fc1 = bias_variable([1024])
# [n_samples, 7, 7, 64] ->> [n_samples, 7*7*64]
h_pool2_flat = tf.reshape(h_pool2, [-1, 7*7*64])
h_fc1 = tf.nn.relu(tf.matmul(h_pool2_flat, W_fc1) + b_fc1)
h_fc1_drop = tf.nn.dropout(h_fc1, keep_prob)
## fc2 layer ##
W_fc2 = weight_variable([1024, 10])
b_fc2 = bias_variable([10])
prediction = tf.nn.softmax(tf.matmul(h_fc1_drop, W_fc2) + b_fc2)
# the error between prediction and real data
cross_entropy = tf.reduce_mean(-tf.reduce_sum(ys * tf.log(prediction),
reduction_indices=[1])) # loss
train_step = tf.train.AdamOptimizer(1e-4).minimize(cross_entropy)
sess = tf.Session()
# important step
# tf.initialize_all_variables() no long valid from
# 2017-03-02 if using tensorflow >= 0.12
if int((tf.__version__).split('.')[1]) < 12 and int((tf.__version__).split('.')[0]) < 1:
init = tf.initialize_all_variables()
else:
init = tf.global_variables_initializer()
sess.run(init)
for i in range(1000):
batch_xs, batch_ys = mnist.train.next_batch(100)
sess.run(train_step, feed_dict={xs: batch_xs, ys: batch_ys, keep_prob: 0.5})
if i % 50 == 0:
print(compute_accuracy(
mnist.test.images, mnist.test.labels))
0.0785
0.8345
0.8826
0.9167
0.9287
0.9383
0.9461
0.9483
0.9497
0.9558
0.9578
0.9589
0.9637
0.9622
0.9631
0.9674
0.9679
0.9697
0.9697
0.9716