LRN全称是local response normalization,局部响应归一化,想了解原理的点这个AlexNet。
看了Alex写的论文,里面介绍了LRN,稀里糊涂的,第一遍根本没看懂,于是我就想,先看看tensorflow怎么做的LRN吧,然后我就看明白了,但我貌似讲不太明白。。。。首先,公式是这样的
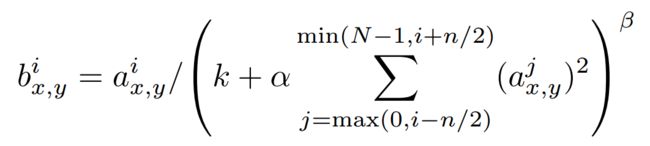
其次,官方API的介绍是这样的:
sqr_sum[a, b, c, d] = sum(input[a,b, c, d - depth_radius : d + depth_radius + 1] ** 2)
output = input / (bias +alpha * sqr_sum) ** beta
以alexnet的论文为例,输入暂且定为 [batch_size, 224, 224, 96],这里224×224是图片的大小,经过第一次卷积再经过ReLU,就是LRN函数的输入。
注意上面API说明里的sum函数,意思就是,可能解释起来比较拗口,针对batch里每一个图的后3维向量,[224, 224, d - depth_radius : d + depth_radius + 1],对它按照半径 depth_radius求每个图里的每个像素的平方,再把这2× depth_radius+1个平方过后的图片加起来,就得到了这个batch的sqr_sum。
不得不说,上面一段解释太差强人意了,貌似还不太对,于是我又思考了一下,从新解释,顺便给出一个小程序以验证,程序如下:
import numpy as np
import tensorflow as tf
a = 2 * np.ones([2, 2, 2, 3])
b = tf.nn.local_response_normalization(a, 1, 0, 1, 1)
sess = tf.Session()
print sess.run(b)
为了简化,上面的程序中令depth_radius=1,bias=0,alpha=1,beta=1,这样算出的结果就相当于
output = input / sqr_sum
实际运行的结果是这样的:
# a的原始值
array([[[[ 2., 2., 2.],
[ 2., 2., 2.]],
[[ 2., 2., 2.],
[ 2., 2., 2.]]],
[[[ 2., 2., 2.],
[ 2., 2., 2.]],
[[ 2., 2., 2.],
[ 2., 2., 2.]]]])
# a经过LRN之后的值
array([[[[ 0.25 , 0.16666667, 0.25 ],
[ 0.25 , 0.16666667, 0.25 ]],
[[ 0.25 , 0.16666667, 0.25 ],
[ 0.25 , 0.16666667, 0.25 ]]],
[[[ 0.25 , 0.16666667, 0.25 ],
[ 0.25 , 0.16666667, 0.25 ]],
[[ 0.25 , 0.16666667, 0.25 ],
[ 0.25 , 0.16666667, 0.25 ]]]], dtype=float32)
这样就很明显了,针对上面的例子,解释如下:
先求某个图(就叫图A吧)周围1半径内(这个半径在第四个维度上,包括图A本身)的图的像素的平方和S,S是三个图像素平方和相加的结果,S的shape是[2, 2],然后A除以S,如下
A = [[2, 2], S = [[12, 12],
[2, 2]] [12, 12]]
O = A/S
= [[0.16666667, 0.16666667],
[0.16666667, 0.16666667]]
这就是上面0.16666667这个数的由来了,总的来讲,当depth_radius=1,bias=0,alpha=1,beta=1时,LRN就是“每个图”除以“半径以内的其他图对应像素的平方和”,就是结果啦!
只能解释到这里了。。
最后还想再说一句,根据Stanford的CS231所讲,最近LRN用的并不多,因为效果不好吧。