自动驾驶是公认的汽车工业未来最有前景的两大产业之一,据行业分析,到2020年无人驾驶或者装载无人驾驶辅助技术的机车保有量将达到1亿台,而相关机构预测,无人驾驶汽车到2025年可以产生2000亿至1.9万亿美元的产值,如此大的市场潜力,不怪乎各路巨头都参战其中。
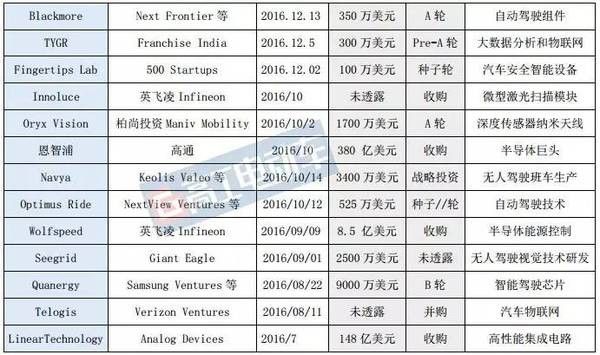
近两年来,自动驾驶犹如一块吸金石狂揽数千亿资本,但车企、科技等各路巨头们还唯恐砸钱不赢。据不完全统计,在过去一年时间里,在自动驾驶领域至少发生了35起并购和投资事件,交易金额高达数千亿,玩家包括了英特尔、高通、福特、通用、宝马、丰田、投资机构等各路诸侯。

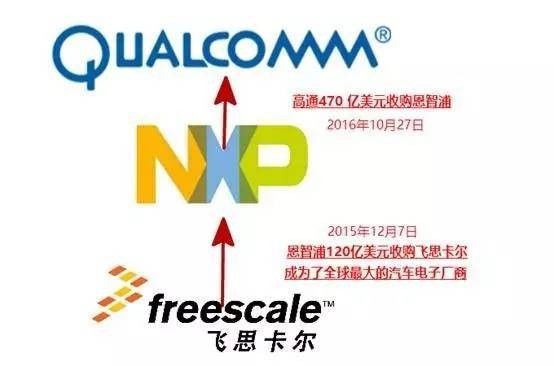
2016年10月27日,高通用470 亿美元的高价收购了恩智浦,创造了整个科技行业历史上的第二大并购事件;随后,老对头英特尔也重砸153亿美元,以远超溢价的价格买下了以色列驾驶辅助技术方面的领导者Mobileye,这两个收购案都掀起一股不小的波澜。
由此可以看出,自动驾驶行业集中化和并购越来越汹涌。过去的行业十大收购案件和这一年的投资并购案显示,各路巨头正疯狂收购自动驾驶领域的各类公司,大到恩智浦,小到成立不到一个月的技术初创公司,为了抢占发展先机,巨头们都不计代价将其收入麾下。



1、高通470 亿美元收购恩智浦
2016年10月27日,高通宣布将以约470亿美元的企业价值收购恩智浦半导体公司。
NXP (恩智浦)是一家荷兰的半导体制造商,在汽车电子、射频、身份识别和安全领域具有很高的市场地位,在V2V的DSRC标准领域有很强的影响力,多种安全产品市占率全球第一。根据Strategy Analytics报告“2016年汽车半导体厂商市场份额”显示,NXP 在汽车半导体市场中的份额已经高达14.2%,远高于英飞凌(Infineon)和瑞萨(Renesas)两家竞争对手。
高通收购恩智浦是半导体行业有史以来规模最大的并购,也是整个科技行业历史上的第二大并购。据了解,高通收购恩智浦合并后的年营收将超过300 亿美元,市值将突破千亿美元。
值得注意的是,作为芯片巨头的高通目前正重点拓展汽车领域,凭借恩智浦公司的安全方案,高通在可以扫清物联网发展的障碍。
2、英特尔153亿美元买下Mobileye
今年3月13日,英特尔官方宣布,以63.54美元/股的价格现金收购以色列科技巨头Mobileye,按此计算,Mobileye的股权价值(equity value)为153亿美元,该项交易预计在9个月内完成。此项交易完成后,英特尔自动驾驶事业部将并入Mobileye。
Mobileye成立于1999年,是知名的高级驾驶辅助系统(ADAS)厂商,其算法和计算机芯片能够根据图像(由汽车上的摄像头拍摄)来预测潜在的碰撞事故。客户有特斯拉,宝马,大众等知名汽车品牌。此项收购后,英特尔将获得汽车自动驾驶的关键技术之一,其在汽车驾驶领域的核心竞争力将显著提升,重要性不亚于高通对恩智浦的收购。
而此前英特尔已经收购了编程芯片制造商Altera,俄罗斯计算机视觉公司Itseez,意大利半导体制造商Yogitech,人工智能(AI)Nervana Systems等。
3、Analog Devices148亿美元收购Linear Technology
2016年7月美国芯片企业Analog Devices公布,同意以价值148亿美元的现金和股票收购同业Linear Technology,交易预计2017年上半年完成。Analog Devices表示将汽车市场列为主要原因。
Linear Technology是高性能线性集成电路制造商,最著名的也是接触的最多的是其电源产品,其性能在业界应该属于领先水平。该公司产品的应用领域包括电信、蜂窝电话、网络产品、笔记本电脑和台式电脑、视频、多媒体、工业仪表、汽车电子等多个领域Analog预计,合并后公司的年销售额将达50亿美元左右。
4、恩智浦120亿美元收购飞思卡尔
2015年12月7日,荷兰恩智浦半导体公司以近120亿美元的价格收购了美国的飞思卡尔半导体,成为了全球最大的汽车电子厂商,并将与汽车行业相关的营收提升至总营收的40%。
飞思卡尔(Freescale)是全球领先的半导体公司,产品广泛得应用于以下领域:高级驾驶员辅助系统(ADAS),物联网(IoT),软件定义网络(SDN),汽车电子,数据连接等领域。
5、电装3633亿日元收购富士通天
2016年9月9日,汽车零部件顶级供应商电装(Denso)宣布收购富士通(Fujitsu)旗下雷达系统制造与无人驾驶系统研发公司富士通天(Fujitsu Ten)电装收购富士通所持41%的股份增持至51%。
有分析人士认为电装如此急切抢占无人驾驶市场与其母公司丰田有关。电装在驾驶辅助系统领域是丰田的“臂膀”,去年全新的卡罗拉车型绕过电装,采用了德国大陆集团提供的更为先进的“事故防止系统”。
6、通用10亿美元收购Cruise Automation
2016年3月份,通用汽车公司宣布收购旧金山无人驾驶技术公司Cruise Automation收购金额估计超过10亿美元,据了解,这个价格曾一度因为过高的“溢价”受到业界的普遍质疑。
Cruise是一个仅有40 人的初创公司,但是具有“完整的”无人驾驶技术,它制造的传感器可将普通车辆变成自动驾驶的汽车,有观点认为通用凭借Cruise的自动驾驶规模化可以领先对手长达2年。目前通用已经抓住的Lyft、Maven和Cruise三张王牌。
7、福特10亿美元收购Argo AI
2017年2月2日,福特宣布10亿美元投资名不经传的Argo。据悉,ArgoAI是一家位于匹茨堡的人工智能企业,由卡耐基梅隆大学一群了解人工智能的机器人专家以及工程师们创办,并且仅仅成立一个多月。
ArgoAI是一家位于匹茨堡的人工智能企业,被福特收购后,将为其开发一款人工智能的虚拟司机系统,以实现福特2021年推出一款全自动无人驾驶汽车的承诺。福特CEO Mark Fields如是说道,“Argo擅长于算法,而我们则强于车辆制造,让我们开始干吧”。
此前,福特以于2016年9月收购共享乘车服务商Chariot、2016年08月和百度1.5 亿美元一起投资生产激光雷达的公司Velodyn,目前,Velodyne已参与了25家自动驾驶车项目。
8、UBER 6.8亿美金OTTO
2016年8月19日,Uber正式宣布以6.8亿美元收购美国无人驾驶卡车初创企业Otto。
Otto成立不到1年,由谷歌自动驾驶部门数位离职工程师共同创立,专注于研发基于已上路卡车的的无人驾驶组件以及雷达传感器。Uber公司CEO Travis Kalanick表示,将联合Otto在匹兹堡建立研发中心,初期将把大约一百台沃尔沃XC90、福特蒙迪欧混动版改造成自动驾驶汽车,用以进行相关的测试和研究。
9、大陆集团6.65亿美元收购了Elektrobit Oyj
2015年5月,德国大陆集团宣布,将以6亿欧元(约合6.8亿美元)收购芬兰Elektrobit公司旗下的旗下的汽车软件部门,以加强其在自动驾驶领域的软件业务。据了解,该部门的营业收入达到了1.7亿欧元,息税前利润为2,240万欧元。
到8月份,大陆称公司自动驾驶系统(包括使用Elektrobit技术产品)收到的订单上涨50%到12亿欧元,该领域成为大陆集团增速最快的业务。
10、四维图新38.75亿人民币收购杰发科技
2016年5月17日,停牌已过半月的四维图新在早间披露重大资产重组方案:拟以发行股份及支付现金相结合的方式收购杰发科技100%股权,此次交易杰发科技作价38.75亿元人民币。
杰发科技主要从事汽车电子芯片的研发和设计,主要产品为车载信息娱乐系统芯片及解决方案,在汽车后装市场占到约60%的国内市场份额。杰发科技打破外厂垄断国内前装汽车电子芯片市场的局面,成功渗透了国内主流合资车品牌,客户有一汽、上汽、东风汽车等国内著名车企。
观察:自动驾驶最具代表性的——英特尔向左 高通向右
Intel:做一个机器人帮你开车
Intel由微处理器发家,借着计算机在上世纪的普及而一举成为全球最大的半导体公司。也正是由于在计算机行业过于成功,想要接着之前在计算机行业的经验去做移动终端业务,结果遭遇滑铁卢,错失了移动互联网的风口。下一个风口是人工智能,Intel当然不想再错过,因此连连出手大举投资。
Intel与人工智能其实一直很接近。人工智能一直以来是计算机领域的一个分支,而Intel与计算机的渊源更是不必多说,因此Intel去做人工智能根本就不算是转型,而只能说是稍微调整了一下计算机业务的重点布置。Intel要做自动驾驶也是以人工智能为切入点,因此要从人工智能如何实现自动驾驶来分析这件事。
人工智能从计算机诞生以来,就成为了计算机科学家一直在思考的问题,即能否用计算机实现人类的思考能力?计算机科学的祖师图灵就思考过这个问题,还提出了著名的“图灵准则”(即人类能否判断与之对话的是人还是计算机)来帮助判断计算机是否真正实现了人工智能。之后,在上世纪中叶,Minsky等人为人工智能的发展做出了卓越的贡献,然而之后人工智能的发展却陷入了低潮。直到十年前,基于深度神经网络的深度学习再度崛起,让世人的目光再次集中到了人工智能这个话题上。神经网络是一种仿生人工智能算法,其崛起的标志性事件是2012年AlexNet的诞生,实现了在ImageNet数据集上物体识别准确率的大幅提升。之后,神经网络越来越深,从十几层,到微软ResNet的一百多层,最近甚至有一千多层的深度学习网络出现。
Intel以人工智能作为自动驾驶的技术路线,其最终目标是打造一个人工智能驾驶系统。该系统可以理解为设计制造一个机器人,这个机器人懂得用传感器感知汽车周围信息,并且根据人工智能算法做决策,以实现与人类一样甚至超过人类表现的驾驶水准。就技术角度,Intel负责这个机器人的大脑(计算部分,Intel毕竟是处理器行业的老大其芯片能提供足够强大的计算能力),而Mobileye负责机器人的眼睛(传感器信号处理芯片,传感器的原始数据量非常大,需要专用的高效处理芯片做预处理后再送去后端的通用处理器做自动驾驶的决策)。
Intel设想的自动驾驶系统中需要用到多种传感器,包括摄像头,毫米波雷达,激光雷达,超声波传感器等等,Intel购买Mobileye的目的,就是为了给自动驾驶系统加上一双敏锐的双目,实现高效传感器融合。算法部分两家公司各有积累,融合之后预期会有更好的算法出现。而数据方面,就要靠与Intel合作的各大车厂提供以训练深度学习算法了。
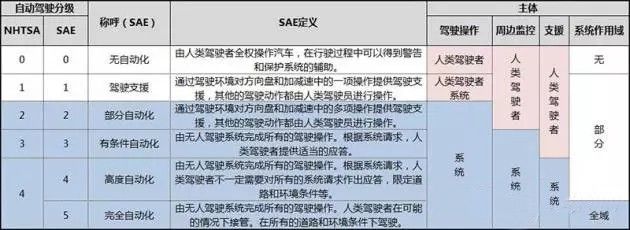
Intel选择的使用神经网络人工智能的自动驾驶归根到底是一种仿生学设计,其效法的对象就是人类本身,无非就是用传感器替代了人类的眼睛,用深度学习算法代替了人类的大脑。从另一个角度想,人类的极限基本就决定了这套自动驾驶系统的极限。在自动驾驶分级中,这套系统支援到第三级(有条件自动化)没有任何问题,因为自动驾驶系统并没有完全接管汽车,这时候相当于真人驾驶员是驾校教练坐在副驾上,而自动驾驶系统是新司机(虽然这个新司机在大多数时候比真人老司机开得更好!),一旦自动驾驶出了什么问题真人老司机立马介入避免事故。
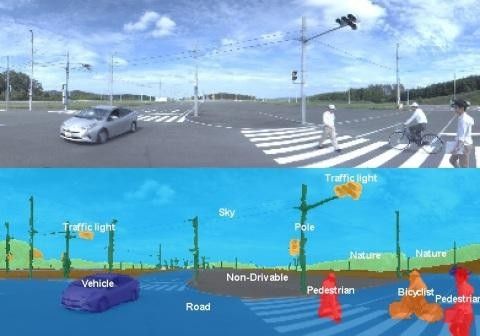
然而,到了第三级以上的自动驾驶(副驾真人老司机在开车过程中基本可以打瞌睡不管自动驾驶系统),人工智能想要真正接管汽车还有不少问题。目前人工智能中深度学习的原理是使用海量数据去训练网络,深度学习网络在训练后可以根据输入数据做决策。然而,数据即使再大,也不可能覆盖所有状况,在很多意想不到的情况下算法可能出错。例如,就拿基于摄像头的自动驾驶来说,摄像头首先获取图像数据,之后处理器在图像上做分割,将背景与前景物体分割开,再识别前景中的道路,车道,活动物体(包括其他汽车,自行车,行人),估计这些物体与车的距离,并做驾驶决策。然而,无论是图像分割,物体识别,还是距离估计,都可能出错,而且出错的地方往往意想不到。之前Tesla的自动驾驶因为没能识别前方的白色大卡车而产生了车祸,据报道援引可能是算法把大卡车当成了白云。这样的错误在人类看来不可思议,但是在基于深度学习的人工智能中却非常有可能,只要训练数据中没有包括这种情况就有机会犯这种错误。然而,驾驶时路况千变万化,训练数据理论上不可能覆盖所有状况,永远有这类落网之鱼。即使统计学上的概率非常非常小,但是对于每个车主来说一旦发生了就是发生了。而且,一旦发生事故,如何界定法律责任也是一个问题,究竟是车厂的责任还是司机的责任,也是一个尚待解决的问题。
另外,这还牵涉到了车主对自动驾驶的信任问题。虽然现在人工智能使用的深度学习网络研究非常火热,但并不代表人们已经理解了深度学习网络。深度学习的基础是统计学,网络的效果好坏也是看测试数据集上的测试准确率,因此人们不完全明白深度学习网络的决策过程,一个典型的例子是AlphaGO对战李世石的时候专业棋手连连表示看不懂AlphaGO的思路,但是最后AlphaGO就是在一片“看不懂”中赢下了比赛。往好里说,这是神奇,是潜力无穷,往坏里说,这是不确定性大。Tesla的自动驾驶汽车能高难度过弯却会阴沟里翻船,将来自动汽车也可能在完全不确定的地方出事故,让车主不能完全信赖。说到底,这个信任问题的根源,还是因为人工智能自动驾驶完全依赖于一个人类还不能完全理解的技术。
小结:Intel基于人工智能的自动驾驶技术是想做一个和人一样根据周围环境做决策完成驾驶任务的系统。Intel的技术可以快速抢占目前主流的0-3级自动驾驶市场,但是在更高级的自动驾驶(即自动驾驶系统掌握车辆的更多主控权)领域,光靠人工智能是不够的。
那么,更高级的自动驾驶市场要靠什么?要靠未来交通的基础设施,即车联网(V2V,V2X)。而这是Qualcomm与NXP更擅长的。
Qualcomm:设计新型汽车自己就能开
Qualcomm的自动驾驶思路与Intel完全不同。如果说Intel是计算机科学家的思路走人工智能,那么Qualcomm就是电子工程师的思路走自动化控制,即车联网。在车联网时代,每辆车以及路上的交通设施都与网络连接传递信息,这样车可以根据从车联网获得的信息来做驾驶决策判断,从而实现自动驾驶。
车联网包括车与车之间的通讯,也包括车与其他设施之间的通讯。车与车之间的通讯可以让每辆车都掌握附近车的信息,例如距离,时速等等。这一方面可以避免交通事故,另一方面也可以增加驾驶效率。例如,现在在开车的时候大家都会与前车保持足够的车距防止前车突然刹车,有了车联网之后前车刹车的第一时间你的车就会知道并且同步减速,这样即使车之间的间距很小也问题不大。这个技术目前已经用在了NXP给卡车车队开发的系统中,在这样的车队里每一辆车的驾驶过程都是同步的,从而可以省去不少因为加速减速的浪费的汽油。车与其他设施之间的通讯也非常有用,例如车辆可以与路牌通讯知道目前的限速。
举个例子来说明Intel和Qualcomm技术的不同思路。下雨天的时候,纯粹基于人工智能的自动驾驶容易出问题,因为车道分割线在下雨天的时候很模糊,人类都看不清楚,人工智能使用机器视觉也一样看不清楚,所以无法很好地识别车道,可能会开着开着就开到其他道上去了。车联网的思路就不同,识别车道压根不是靠机器视觉,而是可以靠道路的基础设施建设使道路交通智能化。例如,可以在车道的分割线上安装射频标签,汽车靠与这些射频标签通讯就可以知道自己有没有行驶在道路中央,甚至还可以获得前方道路是否有弯之类的信息来帮助驾驶。显然,这样的方案不会受到天气的影响。

从上面的例子还可以看出两种方案的其他不同点。首先,不同于之前说到人工智能技术很多时候连研究人员都无法理解,Qualcomm使用的车联网中每一个技术细节(主要是无线通讯)都已经被工程师们完全理解,因此不会出现人工智能在不可思议的地方出错的问题,也不存在训练数据不够的问题。甚至在车联网信号状况不好的时候,汽车也能及时提醒司机及时接管,但是人工智能方案却未必能实现这一点。其次,Intel的自动驾驶技术只是做局部优化,只管一辆车;而Qualcomm的车联网则是有可以做全局优化的潜力,既然所有车都联网了那么交通也可以根据车流做优化疏导,例如交通灯会根据车流来调整红灯和绿灯的时间。Qualcomm车联网方案会给汽车驾驶带来更大的飞跃。人类开车的时候是通过眼睛看前方的路况以及车距,头脑根据这些信息来做判断并控制汽车。Intel的人工智能驾驶是使用传感器代替人类眼睛,使用处理器代替人类大脑,但是人类眼睛会看错,判断会失误,人工智能一样也会犯这样的错误。Qualcomm的车联网方案根本就不需要眼睛,因为道路和车辆的实时信息已经通过网络传递给车辆,所以就不会有“看错”的问题。
当然,Qualcomm的车联网也有一个很大的问题,就是需要把车联网的基础设施都建好了才能完全发挥出所有潜力,相较之下Intel的人工智能驾驶则与基础设施没有任何关系。事实上,车联网与人工智能自动驾驶并不互相矛盾,相反是相辅相成的。在第0-3级自动驾驶中,人工智能即可胜任;但是到了更高级的自动驾驶,必须同时结合两种方案才行。