在学习了 前面的文章 之后,相信大家已经对 TiKV 使用的 Raft 核心库 raft-rs 有了基本的了解。raft-rs 实现了 Raft Leader election 和 Log replication 等核心功能,而消息的发送、接收、应用到状态机等操作则需要使用者自行实现,本文将要介绍的就是 TiKV 中这些部分的处理过程。
Raft Ready
在开始正题之前,我们先简单回顾一下 raft-rs 与外部代码的交互接口: Ready。 Ready 结构的 定义 如下:
pub struct Ready {
/// The current volatile state of a Node.
/// SoftState will be nil if there is no update.
/// It is not required to consume or store SoftState.
ss: Option,
/// The current state of a Node to be saved to stable storage BEFORE
/// Messages are sent.
/// HardState will be equal to empty state if there is no update.
hs: Option,
/// States can be used for node to serve linearizable read requests locally
/// when its applied index is greater than the index in ReadState.
/// Note that the read_state will be returned when raft receives MsgReadIndex.
/// The returned is only valid for the request that requested to read.
read_states: Vec,
/// Entries specifies entries to be saved to stable storage BEFORE
/// Messages are sent.
entries: Vec,
/// Snapshot specifies the snapshot to be saved to stable storage.
snapshot: Snapshot,
/// CommittedEntries specifies entries to be committed to a
/// store/state-machine. These have previously been committed to stable
/// store.
pub committed_entries: Option>,
/// Messages specifies outbound messages to be sent AFTER Entries are
/// committed to stable storage.
/// If it contains a MsgSnap message, the application MUST report back to raft
/// when the snapshot has been received or has failed by calling ReportSnapshot.
pub messages: Vec,
must_sync: bool,
} Ready 结构包括了一些系列 Raft 状态的更新,在本文中我们需要关注的是:
- hs: Raft 相关的元信息更新,如当前的 term,投票结果,committed index 等等。
- committed_entries: 最新被 commit 的日志,需要应用到状态机中。
- messages: 需要发送给其他 peer 的日志。
- entries: 需要保存的日志。
Proposal 的接收和在 Raft 中的复制
TiKV 3.0 中引入了类似 Actor 的并发模型,Actor 被视为并发运算的基本单元:当一个 Actor 接收到一则消息,它可以做出一些决策、创建更多的 Actor、发送更多的消息、决定要如何回答接下来的消息。每个 TiKV 上的 Raft Peer 都对应两个 Actor,我们把它们分别称为 PeerFsm 和 ApplyFsm。PeerFsm 用于接收和处理其他 Raft Peer 发送过来的 Raft 消息,而 ApplyFsm 用于将已提交日志应用到状态机。
TiKV 中实现的 Actor System 被称为 BatchSystem,它使用几个 Poll 线程从多个 Mailbox 上拉取一个 Batch 的消息,再分别交由各个 Actor 来执行。为了保证 线性一致性 ,一个 Actor 同时只会在一个 Poll 线程上接收消息并顺序执行。由于篇幅所限,这一部分的实现在这里不做详述,感兴趣的同学可以在 raftstore/fsm/batch.rs 查看详细代码。
上面谈到,PeerFsm 用于接收和处理 Raft 消息。它接收的消息为 PeerMsg,根据消息类型的不同会有不同的处理:
/// Message that can be sent to a peer.
pub enum PeerMsg {
/// Raft message is the message sent between raft nodes in the same
/// raft group. Messages need to be redirected to raftstore if target
/// peer doesn't exist.
RaftMessage(RaftMessage),
/// Raft command is the command that is expected to be proposed by the
/// leader of the target raft group. If it's failed to be sent, callback
/// usually needs to be called before dropping in case of resource leak.
RaftCommand(RaftCommand),
/// Result of applying committed entries. The message can't be lost.
ApplyRes { res: ApplyTaskRes },
...
}
...
impl PeerFsmDelegate {
pub fn handle_msgs(&mut self, msgs: &mut Vec) {
for m in msgs.drain(..) {
match m {
PeerMsg::RaftMessage(msg) => {
self.on_raft_message(msg);
}
PeerMsg::RaftCommand(cmd) => {
self.propose_raft_command(cmd.request, cmd.callback)
}
PeerMsg::ApplyRes { res } => {
self.on_apply_res(res);
}
...
}
}
}
} 这里只列出了我们需要关注的几种消息类型:
- RaftMessage: 其他 Peer 发送过来 Raft 消息,包括心跳、日志、投票消息等。
- RaftCommand: 上层提出的 proposal,其中包含了需要通过 Raft 同步的操作,以及操作成功之后需要调用的
callback函数。 - ApplyRes: ApplyFsm 在将日志应用到状态机之后发送给
PeerFsm的消息,用于在进行操作之后更新某些内存状态。
我们主要关注的是 PeerFsm 如何处理 Proposal,也就是 RaftCommand 的处理过程。在进入到 PeerFsmDelegate::propose_raft_command 后,首先会调用 PeerFsmDelegate::pre_propose_raft_command 对 peer ID, peer term, region epoch (region 的版本,region split、merge 和 add / delete peer 等操作会改变 region epoch) 是否匹配、 peer 是否 leader 等条件进行一系列检查,并根据请求的类型(是读请求还是写请求),选择不同的 Propose 策略见( Peer::inspect):
let policy = self.inspect(&req);
let res = match policy {
Ok(RequestPolicy::ReadIndex) => return self.read_index(ctx, req, err_resp, cb),
Ok(RequestPolicy::ProposeNormal) => self.propose_normal(ctx, req),
...
};对于读请求,我们只需要确认此时 leader 是否真的是 leader 即可,一个较为轻量的方法是发送一次心跳,再检查是否收到了过半的响应,这在 raft-rs 中被称为 ReadIndex (关于 ReadIndex 的介绍可以参考 这篇文章 )。对于写请求,则需要 propose 一条 Raft log,这是在 propose_normal 函数中调用 Raft::propose 接口完成的。在 propose 了一条 log 之后,Peer 会将 proposal 保存在一个名为 apply_proposals 的 Vec 中。随后一个 Batch (包含了多个 Peer)内的 proposal 会被 Poll 线程统一收集起来,放入一个名为 pending_proposals 的 Vec 中待后续处理。
在一个 Batch 的消息都经 PeerDelegate::handle_msgs 处理完毕之后,Poll 对 Batch 内的每一个 Peer 调用 Peer::handle_raft_ready_append:
- 用记录的
last_applied_index获取一个 Ready。 - 在得到一个 Ready 之后,
PeerFsm就会像我们前面所描述的那样,调用PeerStorage::handle_raft_ready更新状态(term,last log index 等)和日志。 - 这里的状态更新分为持久化状态和内存状态,持久化状态的更新被写入到一个
WriteBatch中,内存状态的更新则会构造一个InvokeContext,这些更新都会被一个PollContext暂存起来。
于是我们得到了 Batch 内所有 Peer 的状态更新,以及最近提出的 proposal,随后 Poll 线程会做以下几件事情:
- 将 Proposal 发送给
ApplyFsm暂存,以便在 Proposal 写入成功之后调用 Callback 返回响应。 - 将之前从各个 Ready 中得到的需要发送的日志发送给 gRPC 线程,随后发送给其他 TiKV 节点。
- 持久化已保存在 WriteBatch 中需要更新的状态。
- 根据
InvokeContext更新 PeerFsm 中的内存状态。 - 将已提交日志发送给
ApplyFsm进行应用(见Peer::handle_raft_ready_apply)。
Proposal 在 Raft 中的确认
上面我们阐述了 Region 的 Leader 在收到 proposal 之后,是调用了哪些接口将 proposal 放到 Raft 状态机中的。在这之后,这个 proposal 虽然被发往了 ApplyFsm 中暂存,但是 ApplyFsm 目前还不能 apply 它并调用关联的 callback 函数,因为这个 proposal 还没被 Raft 中的过半节点确认。那么,Leader 节点上的 raftstore 模块是如何处理收到的其他副本的 Raft 消息,并完成日志的确认的呢?
答案就在 PeerFsmDelegate::on_raft_message 函数中。在一个 Peer 收到 Raft 消息之后,会进入这个函数中进行处理,内部调用 Raft::step 函数更新 Raft 状态机的内存状态。之后,调用 RawNode::ready 函数获取 committed_entries,最终作为 ApplyMsg::Apply 任务发送给 ApplyFsm,由 ApplyFsm 执行指令,如果 proposal 是由本节点发出,还会调用 callback 函数(之前通过 ApplyMsg::Proposal 任务暂存在 ApplyFsm 中)以向客户端返回响应。
Proposal 的应用
在上一部分我们提到,PeerFsm 会将 Proposal 以及已提交日志发送给对应的 ApplyFsm,它们对应的消息类型分别是 ApplyMsg::Proposal 和 ApplyMsg::Apply,下面将会讲述 ApplyFsm 是如何处理这两种类型的消息的。
对于 ApplyMsg::Proposal 的处理非常简单(见 ApplyFsm::handle_proposal),ApplyFsm 会把 Proposal 放入 ApplyDelegate::pending_cmds 中暂存起来,后续在应用对应的日志时会从这里找出相应的 Callback 进行调用。
而 ApplyMsg:Apply 中包含的是实际需要应用的日志,ApplyFsm 会针对这些日志进行(见 ApplyFsm::handle_apply):
- 修改内存状态,将变更的状态(last applied index 等)、数据持久化。
- 调用 Proposal 对应的 Callback 返回响应。
- 向
PeerFsm发送ApplyRes,其中包含了applied_term、applied_index等状态(用于更新PeerFsm中的内存状态)。
这里存在一个特殊情况,就是所谓的“空日志”。在 raft-rs 的实现中,当选举出新的 Leader 时,新 Leader 会广播一条“空日志”,以提交前面 term 中的日志(详情请见 Raft 论文)。此时,可能还有一些在前面 term 中提出的 proposal 仍然处于 pending 阶段,而因为有新 Leader 产生,这些 proposal 永远不可能被确认了,因此我们需要对它们进行清理,以免关联的 callback 无法调用导致一些资源无法释放。清理的逻辑参照 ApplyFsm::handle_entries_normal 函数。
总结
这里用一个流程图总结一下 TiKV 处理 Proposal 的大致流程,如下:
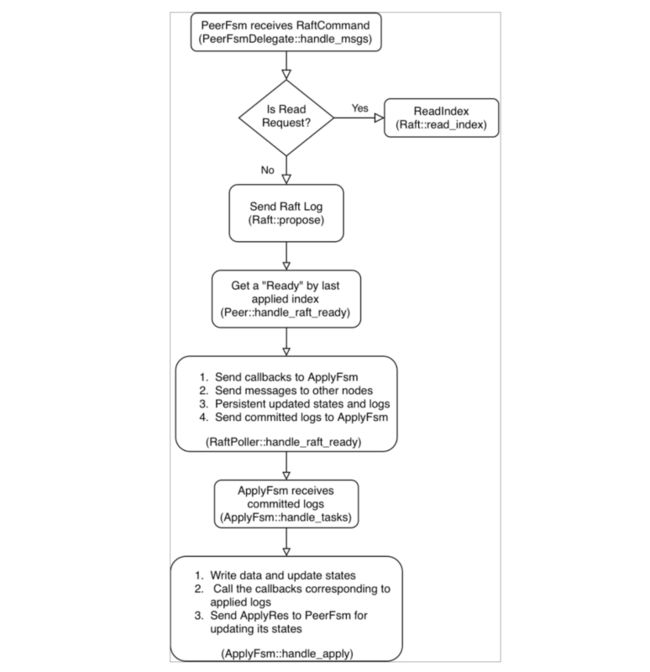
简言之,TiKV 使用了两个线程池来处理 Proposal,并且将一个 Raft Peer 分成了两部分:PeerFsm 和 ApplyFsm。在处理 Proposal 的过程中,首先由 PeerFsm 获取日志并驱动 Raft 内部的状态机,由 ApplyFsm 根据已提交日志修改对应数据的状态机(region 信息和用户数据)。
由于这部分代码涉及到各种 corner case 的处理,因此逻辑较为复杂,希望感兴趣的读者可以进一步从源码中获取更多细节。
