基于QGC3.3.0(翻译的很烂)
本指南解释了QGroundControl(QGC)如何在内部工作,并提供了为项目贡献代码的指导原则。它旨在供开发人员使用!
支持
本开发人员指南最终将成为有关QGroundControl开发信息的主要提供者。如果您发现它缺少有用信息或者有错误的信息,请提出问题。
开发问题可以在QGroundControl Developer里讨论或者通过QGroundControlGitter Gitter的方式。
设计理念
QGC提供了一套单一的代码库,可以在多个系统平台以及不同尺寸和样式的设备上运行。
QGC用户界面使用Qt QML实现。QML提供硬件加速功能,这是平板电脑或手机等低功耗设备的主要特征。QML还提供了一些功能,使我们能够更轻松地创建单一用户界面,从而适应不同的屏幕尺寸和分辨率。
+
QGC用户界面的目标更多的是平板电脑+触摸式UI,而不是基于桌面鼠标的用户界面。这使得单一的用户界面更容易创建,因为平板电脑风格的用户界面也可以在桌面/笔记本电脑上正常工作。
通信流
设备自动连接期间发生的高层通信流的描述。
LinkManager始终打开一个UDP链接,等待Vehicle心跳
LinkManager检测连接到计算机的新的已知设备(Pixhawk,SiK Radio,PX4 Flow)->创建一个连接到Vehicle的新SerialLink
字节通过Link 发送到MAVLinkProtocol
MAVLinkProtocol将字节转换为MAVLink消息
如果该消息是HEARTBEAT,则通知MultiVehicleManager
HEARTBEAT通知到MultiVehicleManager 后,会根据HEARTBEAT消息中的信息创建一个新的Vehicle
Vehicle实例化与Vehicle类型匹配的插件
与Vehicle相关联的ParameterLoader将使用参数协议向Vehicle发送加载参数的指令PARAM_REQUEST_LIST
一旦参数加载完成,与Vehicle关联的MissionManager将使用任务项协议从Vehicle中请求任务项。
参数加载完成后,VehicleComponents将在“设置”视图中显示其UI
固件插件
尽管MAVLink规范定义了与Vehicle进行通信的标准通信协议。该规范有很多方面可供固件开发人员解释。因此,有很多情况下,与运行一个固件的Vehicle的通信必须与运行不同固件的Vehicle的通信略有不同,以完成相同的任务。每个固件也可以实现MAVLink命令集的子集。
另一个主要问题是MAVLink规范不包括Vehicle配置或通用参数集。由于这个与Vehicle配置有关的所有代码最终都是固件特定的。另外,任何必须引用特定参数的代码也是固件特定的。
鉴于固件实现之间的所有这些差异,创建一个单一的地面站应用程序可能非常困难,该应用程序可以支持每个应用程序,而无需将代码库降级为基于Vehicle固件使用的固件随处可见的大量if / then / else语句。
QGC使用插件架构将固件特定代码与所有固件通用的代码隔离开来。
FirmwarePluginManager,FirmwarePlugin
类层次结构
LinkManager,LinkInterface
QGC中的“链接”是与vehicle 的特定类型的通信管道,例如串口或WiFi上的UDP。所有链接的基类是LinkInterface。每个链接运行在它自己的线程上并发送字节到MAVLinkProtocol。
该LinkManager对象跟踪系统中所有打开的链接。LinkManager还通过串口和UDP链接管理自动连接。
MAVLinkProtocol
系统中只有一个MAVLinkProtocol对象。它的任务是从一个链接获取传入的字节并将它们转换为MAVLink消息。MAVLink HEARTBEAT消息被发送到MultiVehicleManager。所有MAVLink消息都被发送到与链路关联的vehicle。
MultiVehicleManager
系统中有一个MultiVehicleManager对象。当它在以前没有看到的链接上收到HEARTBEAT时,它会创建一个Vehicle对象。`MultiVehicleManager还可以跟踪系统中的所有vehicle,并处理从一辆活动的vehicle到另一个的切换,并正确处理正在移除的vehicle。
Vehicle
Vehicle对象是QGC代码通过其与物理设备通信的主接口。
注意:还有一个与每个Vehicle相关的UAS对象,这是一个弃用的类,正在慢慢地逐步淘汰,所有的功能都转移到Vehicle类。这里不应该添加新的代码。
FirmwarePlugin,FirmwarePluginManager
FirmwarePlugin类被用作固件插件的基类。固件插件包含特定于固件的代码,这样Vehicle对象就是干净的,支持UI的单个标准接口。
FirmwarePluginManager是一个工厂类,它根据vehicle的MAV_AUTOPILOT / MAV_TYPE组合创建一个FirmwarePlugin实例。
用户界面设计
QGC中UI设计的主要模式是用QML编写的UI页面,多次与用C ++编写的定制“控制器”进行通信。类似MVC的设计模式。
QML代码通过以下机制绑定到与系统相关的信息:
自定义控制器
QGroundControl提供访问活动Vehicle对象的全局对象
FactSystem提供对参数的访问,并且在某些情况下提供自定义Facts
注意:由于QGC中使用的QML的复杂性以及它依赖与C ++对象的通信来驱动ui,所以不可能使用Qt提供的QML Designer来编辑QML。
多设备设计模式
QGroundControl被设计用于使用鼠标和触摸在多种设备类型上运行,从台式机到笔记本电脑到平板电脑,再到小型手机大小的屏幕。以下是QGC如何做的说明及其背后的原理。
高效的1人开发团队
QGC开发用于解决此问题的设计模式基于快速开发新功能开发,并允许代码库由一个非常小的团队(假设1位开发人员为默认开发团队规模)进行测试和维护。实现这一目标的模式非常严格,因为不遵循它会导致更慢的开发时间和更低的质量。
支持这个1人开发团队的概念会导致一些艰难的决定,而不是每个人都会为此感到高兴。但它确实导致QGC在许多操作系统和外形因素上使用单个代码库进行发布。这是他们其他大多数其他地面站无法实现的。
你问的贡献者呢?QGC有相当数量的贡献者。他们难道不能帮助我们将事情从这个1人开发团队的概念中移除 是的,QGC有不少贡献者。但不幸的是,他们随着时间的推移而来。当他们离开时,他们提供的代码仍然必须保留。因此,您可以回到1人开发团队的概念,这个概念大部分是过去三年发展过程中的平均值。
目标设备
QGC UI设计的优先目标是平板电脑,无论是从触摸角度还是屏幕尺寸角度考虑(例如10英寸Samsung Galaxy标签)。其他设备类型和尺寸可能会因此决定而牺牲一些视觉效果和/或可用性。基于优先级决定的当前订单是平板电脑,笔记本电脑,台式机,手机(任何小屏幕)。
手机大小的屏幕支持
在上面指定的情况下,此时较小的手机大小的屏幕是QGC的最低优先级。更多的重点放在使飞行视图更加实用的主动飞行级别显示上。设置和航迹规划等视图不太关注。这些具体的视图经过测试可以在小屏幕上实用,但使用起来可能很痛苦。
使用的开发工具
Qt Layout controls
QGC没有针对不同屏幕尺寸和/或形状因素的不同编码的UI。一般来说,它使用QML Layout功能来重排一组QML UI代码以适应不同的外观因素。在某些情况下,它在小屏幕尺寸上提供较少的细节以使其适合。但这是一个简单的可见性模式。
FactSystem
QGC内部是一个系统,用于管理系统内的所有单个数据。这个数据模型是他们连接到控件。
严重依赖可重用控件
QGC UI是从一组可重用控件和UI元素开发而来的。这样,添加到可重用控件的任何新功能现在都可以在整个UI中使用。这些可重复使用的控件还连接到FactSystem Facts,然后自动提供适当的用户界面。
这种设计模式的缺点
QGC用户界面最终成为台式机/笔记本电脑/平板电脑/手机的混合风格。因此,不一定是看起来或感觉像它被优化到任何这些。
鉴于目标设备优先级列表以及QGC倾向于重新布局相同UI元素以适应不同外形因素的事实,您会发现随着距离优先级目标越远,这种混合方法越严重。因此,小型手机大小的屏幕在可用性方面遭遇最严重的打击
在某些情况下,QGC可重用控件集可能无法提供绝对最佳UI。但它仍用于防止创建额外的维护表面区域。
由于QGC UI对所有操作系统使用相同的UI代码,因此QGC不遵循操作系统本身指定的UI设计准则。它具有自己的视觉风格,这是从每个操作系统挑选出来的混合物。因此,UI在所有操作系统上的外观和工作方式都基本相同。再一次,这意味着例如在Android上运行的QGC不一定会看起来像一个Android应用程序。或者在iPhone上运行的QGC不会像大多数其他iPhone应用程序那样看起来或工作。这就是说QGC的视觉/功能风格对于这些操作系统用户应该是可以理解的。
这种设计模式的优点
设计新功能所需的时间更少,因为使用此混合模型和控制集进行UI编码一次。布局回流在Qt QML中是非常有用的,一旦习惯了它,它就成为第二性质。
因为功能代码在所有形状因子中都是相同的,所以只能在平台上对一块UI进行功能测试。只有布局流程必须在多个设备上进行可视化检查,但使用移动模拟器很容易完成。在大多数情况下,这是所需要的:
使用桌面版本,调整窗口大小以测试回流。通常也会覆盖平板电脑大小的屏幕。
使用移动模拟器可视化验证手机大小的屏幕。在OSX XCode iPhone模拟器上工作得很好。
以上所有内容对于保持假想的1人开发团队的高效和高质量至关重要
未来发展方向
提高手机(小屏幕)级别的优先级,使其与平板电脑相当。目前的想法是,直到3.3版本发布时间框架(当前正在开发之后发布)才会发生。
字体和调色板
QGC有一套标准的字体和调色板,应该被所有用户界面使用。
importQGroundControl.Palette1.0
importQGroundControl.ScreenTools1.0
QGCPalette
此项目公开QGC调色板。这个调色板有两个变种:明亮和黑暗。调色板适用于户外使用,黑色调色板适用于室内。通常,您不应该直接为UI指定颜色,您应该始终使用调色板中的颜色。如果您不遵循此规则,则您创建的用户界面将无法从明暗风格中更改。
QGCMapPalette
地图调色板用于绘制地图的颜色。由于地图样式不同,特别是卫星和街道,您需要使用不同的颜色来清晰地绘制它们。卫星地图需要看到较浅的颜色,而街道地图需要较暗的颜色才能看到。该QGCMapPalette项目为此提供了一组颜色,以及通过地图在浅色和深色之间切换的功能。
ScreenTools
ScreenTools项目提供了可用于指定字体大小的值。它还提供屏幕大小和QGC是否在移动设备上运行的信息。
用户界面控件
QGC为构建用户界面提供了一套基础控件。一般而言,它们倾向于Qt支持的基础QML控件之上的薄层,这与QGC调色板相关。
importQGroundControl.Controls1.0
以下控件是标准Qt QML控件的QGC变体。它们提供与相应的Qt控件相同的功能,除了它们是使用QGC调色板绘制的。
QGCButton
QGCCheckBox
QGCColoredImage
QGCComboBox
QGCFlickable
QGCLabel
QGCMovableItem
QGCRadioButton
QGCSlider
QGCTextField
QGC控制
这些自定义控件是QGC独有的,用于创建标准的UI元素。
DropButton - RoundButton,它在点击时删除一组选项。示例是平面视图中的同步按钮。
ExclusiveGroupItem - 对支持QML ExclusiveGroup概念的自定义控件使用aa base Item。
QGCView - 系统中所有顶级视图的基本控制。为FactPanels提供支持并显示QGCViewDialogs和QGCViewMessages。
QGCViewDialog - 从QGCView右侧弹出的对话框。您可以指定对话框的接受/拒绝按钮以及对话框内容。用法的例子是当你点击一个参数时,它会打开值编辑器对话框。
QGCViewMessage - QGCViewDialog的简化版本,它允许您指定按钮和简单的文本消息。
QGCViewPanel - QGCView中的主视图内容。
RoundButton - 使用图像作为内容的圆形按钮控件。
SetupPage - 所有Setupvehicle
组件页面的基础控件。
提供标题,说明和组件页面内容区域。
Fact System
Fact System 提供了一组标准化和简化QGC用户界面创建的功能
Fact
fact表示系统内的单个值
FactMetaData
这FactMetaData与每个fact都有关联。它提供了Fact的详细信息,以推动自动用户界面的生成和验证
Fact Controls
Fact Control是一个QML用户界面控件,它连接到一个Fact,并且FactMetaData提供一个控件给用户修改/显示与Fact相关的值。
FactGroup
顶级视图
本节包含有关顶级视图代码的主题:配置,设置,计划和飞行。
配置视图
顶级QML代码是AppSettings.qml
每个按钮加载一个单独的QML页面
设置视图
在SetupView.qml中实现的顶级QML代码
固定的一组按钮/页面:摘要,固件
按钮/页面的其余部分来自AutoPilotPlugin VehicleComponent列表
计划视图
顶级QML代码位于MissionEditor.qml中
主要的可视化UI是一个FlightMap控件
QML与MissionController(C ++)通信,该视图提供了任务项目数据和方法的视图
飞行视图
顶级QML代码位于FlightDisplayView.qml中
QML代码与MissionController(C ++)进行通信以用于任务显示
仪器小部件与活动的Vehicle对象进行通信
两个主要的页面是:
FlightDisplayViewMap
FlightDisplayViewVideo
文件格式
本节包含有关QGroundControl使用/支持的文件格式的主题
参数文件格式
# Onboard parameters for Vehicle 1
#
# # Vehicle-Id Component-Id Name Value Type
11ACRO_LOCKING02
11ACRO_PITCH_RATE1804
11ACRO_ROLL_RATE1804
11ADSB_ENABLE02
以上是带有四个参数的参数文件的示例。该文件可以包含所需的参数。
注释以#开头。
这个标题:# MAV ID COMPONENT ID PARAM NAME VALUE描述了每一行的格式:
Vehicle-Id vehicle ID
Component-Id 参数的组件ID
Name 参数名称
Value 参数值
Type使用MAVLink MAV_PARAM_TYPE_*枚举值的参数类型
参数文件包含单个vehicle的参数。它可以包含该vehicle内多个组件的参数。
飞行计划文件格式
除非另有说明,否则单位为m.
{
"fileType":"Plan",
"version":1
"groundStation":"QGroundControl",
"mission": {
"version":2
"firmwareType":12,
"vehicleType":2,
"cruiseSpeed":15,
"hoverSpeed":5,
"plannedHomePosition": [
47.632939716176864,
-122.08905141,
40
],
"items": [
...
],
},
"geoFence": {
...
},
"rallyPoints": {
...
},
}
在上面,您可以看到计划文件的顶级格式。计划文件以JSON文件格式存储,并包含与飞行计划相关的任务,地理围栏和集会点。
键描述
文件类型必须是“计划”。
版该文件的版本。当前版本是1。
地面站创建此文件的地面站的名称。
任务与此飞行计划相关的任务。
栅栏(可选的)
rallyPoints(集会)(可选的)
任务对象
以下值是必需的:
键描述
版任务对象的版本。当前版本是2。
firmwareType此任务创建的固件类型使用MAVLink MAV_AUTOPILOT枚举值。
飞机类型此任务创建的车型使用MAVLink MAV_TYPE枚举值。
cruiseSpeed
hoverSpeed
项目与任务相关的任务项目对象列表。
plannedHomePosition当您编辑任务时,您计划在地图上显示的主要位置。数组的值是纬度,经度和高度。
任务项目 - SimpleItem
一个简单的项目代表单个MAVLink MISSION_ITEM命令。
{
"autoContinue":true,
"command":22,
"frame":2,
"params": [
0,
0,
0,
0,
47.633127690000002,
-122.08867133,
50
],
"type":"SimpleItem"
},
在这些值SimpleItem直接映射到在值MISSION_ITEM:
在这些值SimpleItem直接映射到在值MISSION_ITEM:
键描述
AUTOCONTINUEMISSION_ITEM.autoContinue
命令MISSION_ITEM.command
帧MISSION_ITEM.frame
PARAMSMISSION_ITEM.param1,2,3,4,X,Y,Z
任务项目 - ComplexItem
一个复杂的项目是将多个MISSION_ITEMS作为单个实体处理的更高级别的封装。
{
"complexItemType":"survey",
"type":"ComplexItem",
"version":3,
...
},
复杂的项目有两个与它们相关的附加值:
键描述
complexItemType指定复杂项目的类型。QGroundControl目前支持以下类型:survey,fwLandingPattern
版指定此复杂项目的版本。
DO_JUMP任务项的特殊处理
由于DO_JUMP命令要求您指定要跳转到的序列号,并且任务文件格式不指定序列号,所以需要进行特殊处理。
首先,您必须为要跳转到的任务项目分配一个唯一标识符:
{
...
"doJumpId":100
}
的doJumpId可以是大于0的任何值,且必须唯一地识别目标DO_JUMP。
然后在实际的DO_JUMP任务项目中,您可以在MISSION_ITEM.param1值中引用此唯一ID:
{
...
"command":177,
"params": [
100,
...
],
...
},
加载任务时,将确定并填写实际的DO_JUMP序列号。
复杂项目 - 勘测
调查在任务中的多边形区域上创建了一条飞行路线。
{
"camera": {
"focalLength":16,
"groundResolution":3,
"imageFrontalOverlap":10,
"imageSideOverlap":10,
"name":"Sony ILCE-QX1",
"orientationLandscape":true,
"resolutionHeight":3632,
"resolutionWidth":5456,
"sensorHeight":15.4,
"sensorWidth":23.199999999999999
},
"cameraTrigger":true,
"cameraTriggerDistance":25,
"complexItemType":"survey",
"fixedValueIsAltitude":false,
"grid": {
"altitude":50,
"angle":0,
"relativeAltitude":true,
"spacing":30,
"turnAroundDistance":0
},
"manualGrid":true,
"polygon": [
[
47.633933816132817,
-122.08937942845
],
[
47.634139864633021,
-122.08781838280333
],
[
47.633395194285789,
-122.08872496945037
]
],
"type":"ComplexItem",
"version":3
}
Survey被表示为存储在items数组中的JSON对象。它存储与调查相关的所有元数据。它不存储调查中的各个航点。这些是在QGroundControl加载任务时生成的。
键描述
相机指定与用于调查的相机关联的值的对象。仅在必要时manualGrid为false。
cameraTrigger指定是否应以指定的cameraTriggerDistance时间间隔触发相机。
complexItemType将这个复杂的任务项目标识为一个survey。
fixedValueIsAltitude指定在修改Survey用户界面的其他值时是否保持Altitude不变。仅供QGroundControl UI使用。
格指定与测量网格关联的值的对象。
manualGridtrue:网格值由用户手动指定false:网格值基于camera对象指定的相机设置。
多边形表示多边形调查区域的多边形数组。每个点都是多边形顶点的纬度和经度对。
类型指定这个项目是一个ComplexItem。
版调查复杂任务项目格式的版本号。当前版本是3。
网格对象
该grid对象指定与调查网格关联的值。
"grid": {
"altitude":50,
"angle":0,
"relativeAltitude":true,
"spacing":30,
"turnAroundDistance":0
},
键描述
高度网格内所有横断面航点的高度。
角度横断面路径的角度(度)。
relativeAltitudetrue:altitude是相对于家庭的,false:altitude是AMSL
间距每个样线之间的间距。
turnAroundDistance在转向下一个横断面之前飞过多边形边的距离。
相机对象
该camera对象指定与用于调查的相机相关的值。该对象仅在manualGridis时是必需的false。
"camera": {
"focalLength":16,
"groundResolution":3,
"imageFrontalOverlap":10,
"imageSideOverlap":10,
"name":"Sony ILCE-QX1",
"orientationLandscape":true,
"resolutionHeight":3632,
"resolutionWidth":5456,
"sensorHeight":15.4,
"sensorWidth":23.199999999999999
},
键描述
长焦点相机镜头的焦距,单位为毫米。
groundResolution目标地面分辨率,单位为cm / px。
imageFrontalOverlap正面图像重叠的百分比。
imageSideOverlap侧面图像重叠的百分比。
名称正在使用的照相机的名称。应该对应于QGroundControl已知的摄像头之一。使用"Custom Camera Grid"自定义摄像头规格,
orientationLandscapetrue:照相机横向安装在车辆上,false:照相机以纵向方向安装在车辆上
resolutionHeight,resolutionWidth图像像素分辨率。
sensorHeight,sensorWidth传感器尺寸以毫米为单位。
集会点文件格式
{
"fileType":"RallyPoints",
"groundStation":"QGroundControl",
"points": [
[
47.634309760000001,
-122.08936869999999,
50
],
[
47.634244700000004,
-122.08700836,
50
],
[
47.632784270000002,
-122.08712101,
50
],
[
47.632769809999999,
-122.08939552,
50
]
],
"version":1
}
GeoFence文件格式
{
"fileType":"GeoFence",
"groundStation":"QGroundControl",
"parameters": [
{
"compId":1,
"name":"FENCE_ENABLE",
"value":1
},
{
"compId":1,
"name":"FENCE_TYPE",
"value":4
},
{
"compId":1,
"name":"FENCE_ACTION",
"value":0
},
{
"compId":1,
"name":"FENCE_ALT_MAX",
"value":0
},
{
"compId":1,
"name":"FENCE_RADIUS",
"value":0
},
{
"compId":1,
"name":"FENCE_MARGIN",
"value":0
}
],
"polygon": [
[
47.634457973002796,
-122.08958864075316
],
[
47.634371216366716,
-122.08675086361541
],
[
47.632610748511105,
-122.08689033848418
],
[
47.632610748511105,
-122.08967983585967
]
],
"version":1
}
MAVLink日志格式
QGroundControl允许您生成可重播的简单MAVLink数据包日志(使用QGroundControl)以再次观看任务以进行分析。
格式是二进制的:
字节1-8:Unix时代以来的时间戳,以微秒为无符号64位整数
字节9-271:MAVLink数据包(最大数据包长度为263字节,并非所有字节都必须是实际数据,数据包可能较短,包括数据包开始标志)
调试
要检查您的数据,请在十六进制编辑器中打开您的书面文件。你应该在8字节后看到0x55。前8个字节也应该转换为有效的时间戳,所以要么接近于零,要么围绕数字1294571828792000(这是当前Unix纪元时间戳,以微秒为单位)。
用于记录MAVLink的C ++ Sketch
下面的代码片段显示了如何使用C ++标准库中的C ++流实现日志记录。
//write into mavlink logfile
constintlen = MAVLINK_MAX_PACKET_LEN+sizeof(uint64_t);
uint8_tbuf[len];
uint64_ttime = getSystemTimeUsecs();
memcpy(buf, (void*)&time,sizeof(uint64_t));
mavlink_msg_to_send_buffer(buf+sizeof(uint64_t), msg);
mavlinkFile << buf << flush;
开发者工具
QGroundControl在调试版本中提供了许多工具。这些简化了常见的开发人员任务,包括设置用于测试的模拟连接以及通过MAVLink访问System Shell。
工具包括:
模拟链接 - 创建和停止多个模拟vehicle链接。
模拟链接
模拟链接允许您在QGroundControl调试版本中创建和停止多个模拟(模拟)vehicle的链接。
该模拟不支持飞行,但确实可以轻松测试:
任务上传/下载
查看和更改参数
测试大多数设置页面
多个vehicle用户界面
它对于任务上传/下载的单元测试错误情况特别有用。
使用模拟链接
要使用模拟链接:
通过构建源代码创建一个调试版本。
通过选择顶部工具栏中的应用程序设置图标访问模拟链接,然后选择边栏中的模拟链接:
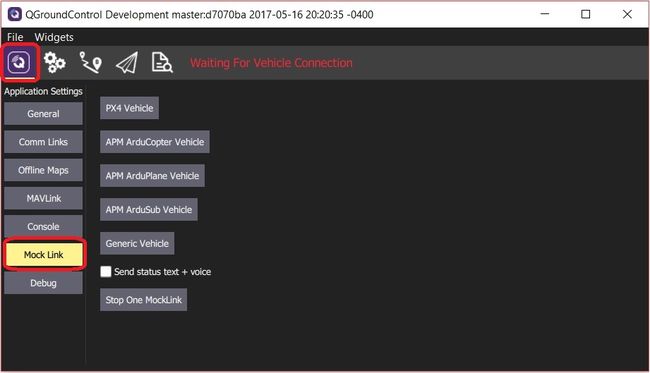
点击面板上的按钮可创建关联类型的vehicle链接。
每次点击一个按钮,都会创建一个新的连接。
当有多个连接时,多vehicle用户界面将出现。

点击停止一个模拟链接停止当前活动的vehicle。
使用模拟链接与使用任何其他vehicle差不多,除了模拟不允许飞行。
自定义命令小部件
自定义命令的widget功能允许开发加载QML的UI在运行时(而不必重新生成QGroundControl或了解其内部结构)。一次可以加载一个小部件,在QGroundControl重新启动之间将被“记住” 。
开发人员可以使用QML语言的任何功能以及任何暴露于QML的vehiccle功能(包括许多有用的“标准vehicle信息”,但不是任意的MAVLink流量或自定义类型)。
该功能主要用于创建简单的UI以发送自定义命令和更改参数。
此功能仅在桌面版本(Windows,Linux,Mac OS)上受支持。虽然它出现在最终用户的构建中,但仅供开发人员使用。
如何加载自定义小部件
加载一个小部件:
从任何屏幕打开菜单窗口小部件>自定义命令。

该自定义命令将显示选择对话框。
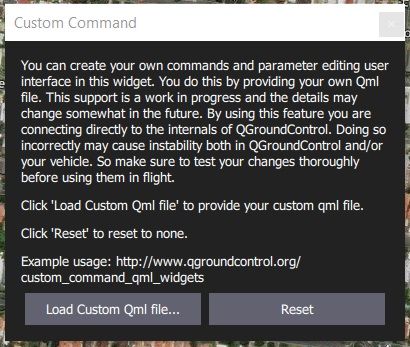
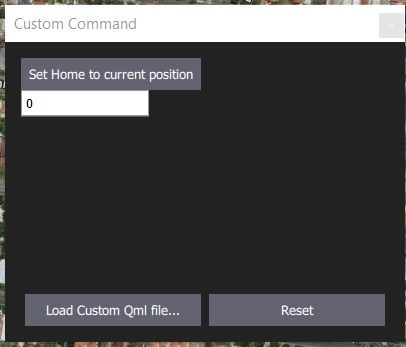
选择加载自定义Qml文件...,然后使用文件选择器找到用于小部件加载的QML文件(下图显示了示例小部件)
重新启动QGroundControl以激活小部件。
您可以按重置以删除当前的小部件或加载自定义Qml文件...以选择一个新的小部件。如果QML文件无效,您将收到警告,如下所示。

创建一个Widget QML文件
开发人员可以使用QML语言的任何特性。以下部分显示了解决主要(预期)用例的情况:
创建一个按钮发送自定义命令(MAVLink COMMAND_LONG消息)
定义一个参数编辑器
即使按下重置(这些缓存),您也必须重新启动QGroundControl才能获取QML文件中的任何更改。
发送自定义命令
该QGCButton控件由...提供QGroundControl.Controls。它是标准QML Button元素的包装,它使用默认的QGC字体和调色板。
该按钮连接到controller.sendCommand()发送MAVLink COMMAND_LONG消息的方法(在这种情况下,设置原始位置)。
QGCButton{text:"Set Home to current position"// Arguments to CustomCommandWidgetController::sendCommand (MAVLink COMMAND_LONG)// command id// component id// confirmation// param 1-7onClicked: controller.sendCommand(179,50,0,1,0,0,0,0,0,0)}
参数编辑器
该FactTextField控件由Fact System(GroundControl.FactControls)提供。它是QML TextField元素的一个包装,它允许你直接绑定到任何参数。当您单击输入或单击字段时,参数会自动更改。
目前没有值验证。因此,您可能会通过将参数设置为不正确的值来使您的车辆坠毁。验证将在未来进行。
引用参数时要非常小心。如果您指定了一个不存在的参数,QGroundControl将发出警告并关闭。
FactTextField{// The -1 signals default component id.// You can replace it with a specific component id if you likefact: controller.getParameterFact(-1,"MAV_SYS_ID")}
示例QML文件
下面的示例自定义命令窗口小部件QML文件结合了上一节中介绍的控件。
import QtQuick 2.2import QGroundControl.Controls 1.0import QGroundControl.FactSystem 1.0import QGroundControl.FactControls 1.0import QGroundControl.Palette 1.0import QGroundControl.ScreenTools 1.0import QGroundControl.Controllers 1.0Rectangle{anchors.fill:parentcolor: qgcPal.windowCustomCommandWidgetController{id: controllerfactPanel: panel}QGCPalette{id: qgcPal;colorGroupEnabled: enabled }Column{spacing: ScreenTools.defaultFontPixelHeightQGCButton{text:"Set Home to current position"// Arguments to CustomCommandWidgetController::sendCommand (MAVLink COMMAND_LONG)// command id// component id// confirmation// param 1-7onClicked: controller.sendCommand(179,50,0,1,0,0,0,0,0,0)}// The FactTextField control is bound to the specified parameter. Note that there is no validation.FactTextField{// The -1 signals default component id.// You can replace it with a specific component id if you likefact: controller.getParameterFact(-1,"MAV_SYS_ID")}}}
命令行选项
您可以使用命令行选项启动QGroundControl。这些用于启用日志记录,运行单元测试以及模拟不同的主机环境进行测试。
使用选项启动QGroundControl
您需要打开命令提示符或终端,将目录更改为qgroundcontrol.exe的存储位置,然后运行它。下面显示了每个平台(使用该--logging:full选项):
Windows命令提示符:
cd"\Program Files (x86)\qgroundcontrol"
qgroundcontrol --logging:full
OSX终端应用程序(应用程序/实用程序):
cd/Applications/qgroundcontrol.app/Contents/MacOS/
./qgroundcontrol --logging:full
Linux终端:
./qgroundcontrol-start.sh --logging:full
选项
下表列出了选项/命令行参数。
选项描述
--clear-settings清除应用程序设置(将QGroundControl恢复为默认设置)。
--logging:full打开完整日志记录。请参阅控制台记录。
--logging:full,LinkManagerVerboseLog,ParameterLoaderLog打开完整日志记录并关闭以下列出的以逗号分隔的日志记录选项。
--logging:LinkManagerLog,ParameterLoaderLog打开指定的逗号分隔记录选项
--unittest:name(仅限Debug版本)运行指定的单元测试。离开:name去运行所有测试。
--unittest-stress:name(仅限Debug版本)连续运行指定的单元测试20次。离开:姓名以运行所有测试。
--fake-mobile模拟在移动设备上运行。
--test-high-dpi模拟在高DPI设备上运行QGroundControl。
笔记:
+
单元测试自动包含在调试版本中(作为QGroundControl的一部分)。QGroundControl在单元测试的控制下运行(它不能正常启动)。
代码提交
本节包含有关贡献代码的主题,包括编码风格,测试和请求格式。
QGroundControl(QGC)作为Apache 2.0和GPLv3双重许可。所有捐款都必须在两个许可下进行。
编码风格
高级风格信息:
选项卡扩展到4个空格
Pascal / CamelCase命名约定
样式本身是以下示例文件中的文档:
CodingStyle.cc
CodingStyle.h
CodingStyle.qml
单元测试
QGC包含一组必须通过的单元测试,才能通过拉取请求考虑更改。为QGC增加新的复杂子系统应该包括一个相应的新单元测试来测试它。
您可以使用--unittest命令行选项从命令行运行单元测试,该选项将运行所有测试。您可以通过指定它来运行特定的单元测试:--unittest:RadioConfigTest。
单元测试的完整列表可以在UnitTestList.cc中找到。
Pull Requests
所有的请求都通过QGC CI构建系统,构建发布和调试版本。如果有编译器警告,构建将失败。单元测试也针对支持的操作系统调试版本运行。
许可证
QGroundControl许可证
QGroundControl(QGC)作为Apache 2.0和GPLv3双重许可。所有捐款都必须在两个许可下进行。代码库的用户可以根据任何许可证免费使用它。
QGroundControl许可排除了任何copyleft(例如GPL)许可代码的重复使用。所有贡献必须是原始的或来自兼容许可证(BSD 2/3条款,MIT,Apache 2.0)。
为了能够通过iOS和Android应用商店提供QGroundControl并提供开源社区选择,双重方法是必要的。
Apache 2.0许可证
的Apache 2.0的许可证是一个许可证,它允许QGC待建并在任何环境中使用,包括专用应用程序。它允许QGC为移动应用程序商店构建。使用Apache 2.0构建商业Qt许可证是必需的。
GPL v3许可证
在GPL v3的许可是一种强的copyleft许可证。在根据此许可证构建QGC时,可以使用Qt的开源版本。我们的许可授予许可使用许可的更高版本,但是,贡献必须在3.0以下。
文档,图稿,图像
QGroundControl文档,艺术作品和图像在CC BY 4.0下获得许可。