直升机作为20世纪航空技术极具特色的创造之一,极大的拓展了飞行器的应用范围。直升机是典型的军民两用产品,在军用方面,无人直升机既能执行各种非杀伤性任务,又能执行各种软硬杀伤性任务,包括侦察、监视、目标截获、诱饵、攻击、通信中继等。在民用方面,无人直升机在大气监测、交通监控、资源勘探、电力线路检测、森林防火等方面具有广泛的应用前景。
近十几年来,随着复合材料、动力系统、传感器、尤其是飞行控制等技术的研究进展,无人直升机得到了迅速的发展,正日益成为人们关注的焦点。
直升机本体包括旋翼、尾桨、机体、操纵系统、动力装置等。
旋翼篇
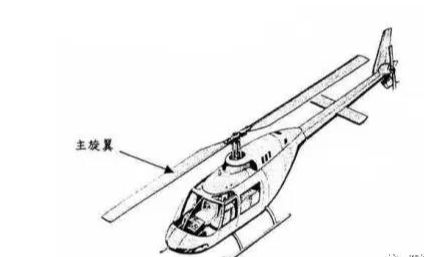
一、主旋翼
主旋翼是直升机和旋翼机等旋翼航空器的主要升力部件,主旋翼由桨毂和数片桨叶构成,桨毂安装在旋翼轴上,形如细长机翼的桨叶则连在桨毂上。
一、旋翼的旋转方向
当旋翼旋转时,有的旋翼是右旋,有的是左旋。若伸出右手,大拇指向上(指向旋翼升力方向),四指握拳方向与旋翼旋转方向一致,则该旋翼为右旋;
若伸出左手,其四指握拳方向与旋翼旋转方向一致,则为左旋旋翼。
二、主旋翼的作用
① 产生升力,用以平衡直升机的重力以及机身、平尾、机翼等部件在垂直方向上的分力。
② 产生向前的水平分力,克服空气阻力使直升机前进。
③ 在悬停时,产生侧向或向后水平分力,使直升机进行侧飞或后飞。
④ 产生分力及力矩对直升机进行控制或机动飞行,类似于飞机上的各种操纵面
主旋翼的组成
1、桨毂(gǔ)
简单来说,桨毂功能之一是连接桨叶,二是连接传动主轴。好比汽车车轮毂的作用。
Tip:桨叶与桨毂之间螺丝需拧紧,但不宜过紧。一般三指力度移动桨叶能够顺畅便可。

2、拉杆与摇臂
又叫变距拉杆,变距摇臂。功能是连接桨毂、T型头与十字盘,舵机控制十字盘运动、通过拉杆与摇臂使桨毂改变方向,从而达到桨叶挥舞行成直升机的运动。
3、十字盘
十字盘也叫倾斜盘,是直升机最重要的部分之一。十字盘是由机械液压驱动,并且和飞行员的操纵杆相联动的。十字盘不止可以前后倾斜,其可以向任何一个方向倾斜。从而带动桨叶改变飞行姿态和方向。

4、螺旋桨
螺旋桨是指靠桨叶在空气或水中旋转,将发动机转动功率转化为推进力的装置。螺旋桨分为很多种,应用也十分广泛。搭配倾斜盘来实现直升机的灵活移动。“竹蜻蜓”就是最原始的一种螺旋桨。
Tip:直升机的螺旋桨是非常主要也是非常脆弱的,每次使用完后尽量装入保护套中,同时也需要定期保养。

三、尾旋翼
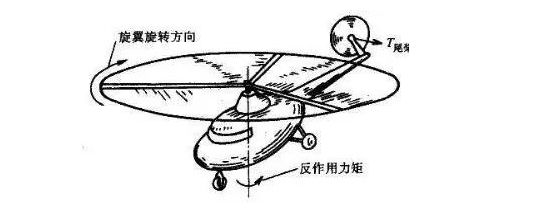
牛顿第三定律告诉我们“相互作用的两个物体之间的作用力和反作用力总是大小相等,方向相反,作用在同一条直线上”。所以当直升机驱动旋翼旋转时,旋翼也必然会对直升机产生一个反作用力矩,如果只有一个旋翼,没有其他措施,直升机机体会进入“不由自主”的旋转。
尾旋翼是指单旋翼直升机为平衡旋翼扭矩产生的反作用力矩而在机身尾部所装置的小型旋翼。其构造与旋翼基本相同,其旋转平面平行于直升机的对称面。

1、尾旋翼的作用
提供反力矩,保持飞机的平衡,同时,利用尾桨的变矩作用控制直升机的航向。
直升机飞行时,旋翼旋转的反作用扭矩会使直升机向与旋翼旋转的相反方向转动,尾桨产生的拉力可抵消这种转动而实现航向稳定。
2尾旋翼的组成
1、尾桨毂:与主旋翼桨毂功能相同。

2、尾拉杆与尾摇臂
与主旋翼拉杆摇臂功能相同。但尾旋翼拉杆直接连接在舵机上。

3、尾桨
与主螺旋桨功能相同。

四、直升机有如下几种
1、单旋翼直升机
顾名思义,单旋翼直升机就是它只有一个旋翼。一般它必须带一个尾桨负责抵消旋翼产生的反转矩。例如,欧洲直升机公司制造的EC-135直升机。图2就是一个带尾桨的单旋翼直升机图片。
但是,也有单旋翼直升机无尾桨的情况,这时它的机身尾部侧面有空气排出管道,用喷气的反作用力来抵消旋翼产生的反转矩。例如,美国麦道直升机公司生产的MD520N直升机。“旋翼产生的反转矩”将是本文的讨论的重点。
2、双旋翼直升机
双旋翼直升机具有两个旋翼。两个旋翼的排列有如下三个情况:
- 纵列式:两个旋翼前后纵向排列,旋转方向相反。例如,美国波音公司制造的CH-47“支努干”运输直升机。
- 横列式:两个旋翼左右横向排列,旋翼轴间隔较远,旋转方向相反。比如,前苏联的Mi-12直升机
- 共轴式:两个旋翼上下排列,在同一个转轴线上,互成反向旋转。例如,前苏联的卡-50武装直升机。
3、四旋翼直升机
下图中国研制的四旋翼无人直升机。四个旋翼分为两对,分别以正螺旋和反螺旋方向旋转。

叶片数量
叶片数量往往与载重量大小相关,常见有2,3,4,8 个叶片。
例如米-8直升机有4个叶片;米-28有5个叶片;米-26直升机的旋翼有8个叶片,尾桨有5个叶片。2008年5月26日,一架红色米-26直升机吊装了一台重约13.2吨的重型挖掘机,前往唐家山堰塞湖坝体。
倾转式旋翼飞机
美国V-22鱼鹰直升机就是倾转式旋翼飞机(参见图5),它兼有直升机和飞机的共同优点。当旋翼的转轴竖直时,旋翼产生升力。当转轴角(与竖直轴的夹角)接近90度时,旋翼就变成螺旋桨,飞行速度由300公里/时,提高到500公里/时。现在,美国V-22部署到东亚美军驻日基地,对中国进行威慑。

五、直升机旋翼动力学奥妙与动量矩守恒律
前边提到,单旋翼直升机除了有一个大的旋翼外,在尾部还有一个小的尾旋翼(也叫尾桨)。下图是一个带镶嵌式尾旋翼(尾桨)的直升机。尾桨产生的作用力沿水平方向,并且与机身垂直,对机身重心有一个力矩(转矩)。再仔细看,尾桨力矩使机身转动的方向必然和主旋翼的转动方向相反。在设计时,要保证尾桨的转矩与旋翼的动量矩大小相等方向相反。这样直升机才能正常飞行。下面我们从力学原理出发来讨论一下直升机运行的奥秘。

动量矩定理 (Theorem of moment of momentum) 和动量矩守恒定律 (Law of conservation of moment of momentum) 是刚体(或质点系)运动必须满足的动力学原理。动量矩定理说,动量矩对时间的变化率等于外加力矩之总和。当质点系不受外力作用或所受全部外力对某定点或定轴的主矩始终等于零时,该质点系对该点或该轴的动量矩保持不变。即当作用于它的外力矩之和为零时,它的动量矩变化率将等于零。这就是动量矩守恒定律。
为了更严格地说明动量矩定理和动量矩守恒定律,请看下边的公式:
动量矩
- 质点对某点的动量矩为L0(mv)= rmv; 其中,黑体符号L0、 r、v都是向量。这个公式表明,质点m对0点的动量矩L0等于质点m到0点的矢径r与其动量mv的矢量积。
- 刚体的动量矩为Lz=Jzω; 其中,Jz为刚体对于转轴的转动惯量,ω是角速度向量。
动量矩定理
动量矩对时间的变化率等于外加力矩之总和,就是:
[Lz]' =∑Mz(Fi )
其中,等号左边是对动量矩Lz求时间导数,右边是对外力矩求和。
动量矩守恒定律
当上式的右端项为零时,Lz为常数,即动量矩永恒不变。直升机在空中飞行时,它的旋翼不停地旋转,这将产生对直升机重心的动量矩。
由于它是孤立系统,外界对它的外力矩之和为零,如果没有尾桨的话,机身将不停地向旋翼旋转的反向旋转,这样就难以执行所指定的各类任务。安装尾桨就是要以尾桨的力矩平衡这个“旋翼产生的反转矩”。这就是直升机安装尾桨的力学意义。
为使机身不产生旋转,也不安装尾桨。聪明的工程师们设计了共轴式双旋翼直升机(参见下图)。
它的两幅旋翼安装在同一个轴上,分别朝不同方向旋转,二者的动量矩必须大小相等,构成平衡。若是双轴两旋翼情况(如V-22鱼鹰直升机),要求两个旋翼的转动方向相反且动量矩相等。对于四轴四旋翼情况,很容易推断,它们要两两成对,分别朝反向转动,动量矩大小要相等,以保证总动量矩为零。

最后,和动量矩守恒有关的例子是陀螺仪,它是具有高速旋转刚体转子、服从动量矩守恒律的一种常用仪表。现代高精度的单自由度陀螺常是液浮、磁浮和气浮并用的三浮陀螺仪。这种陀螺仪的精度极高。陀螺仪广泛应用于各种运载体(如船舶、飞机等)上,成为各种运载体的自动控制、制导和导航系统中测定姿态、方位的重要元件。实际上,地球就是一个巨大的陀螺仪,由于动量守恒,其旋转角速度恒久不变。
尾桨给直升机的设计带来了很多麻烦
1、尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。
尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。
2、虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右面向直升机看,尾桨顺时针旋转),这样尾桨对主旋翼的气动干扰小,主旋翼的升力可以充分发挥。尾桨也可以逆着主旋翼的方向旋转,也就是说,对于逆时针旋转的主旋翼,尾桨向后转(或者说,从右面向直升机看,尾桨逆时针旋转),这样尾桨和主旋翼之间形成一个互相干扰,主旋翼的升力受到损失,但尾桨的作用加强,所以可以缩小尺寸,或降低功率。两者没有绝对的优劣,设计得当时,一般选择顺着转,只有设计不当、尾桨控制作用不够时,才选择逆着转,像米-24直升机那样。
3、涵道尾桨(fenestron)将尾桨缩小,“隐藏”在尾撑端部的巨大开孔里,相当于给尾桨安上一个罩子,这样大大改善了安全性,不易打到周围的物体。
由于涵道尾桨的周边是遮蔽的,尾桨翼尖附近的气流情况大大简化,翼尖速度较高也不至于大大增加噪声。罩子的屏蔽也使前后方向上的噪声大大减小。涵道尾桨的缺点是风扇的包围结构带来较大的重量,这个问题随涵道尾桨直径增加而急剧恶化,所以涵道尾桨难以用到大型直升机上。涵道尾桨只有法国直升机上采用,美国的下马了的 Comanche 是法国之外少见的采用涵道尾桨的例子。
4、旋翼倾斜,造成升力的作用力轴线倾斜,由于作用力轴线不再通过重心,造成扭转力矩,使飞机向旋翼倾斜方向滚转,直到作用力轴线重又通过重心,恢复平衡。
5、周期距控制不仅用来控制行进方向,还用来控制滚转姿态。正常飞行时,旋翼的升力轴线必定通过飞机的重心,不然飞机要发生滚转。周期距控制使旋翼倾斜的同时,升力轴线同时倾斜,偏离直升机的重心,造成滚转力矩。飞机发生滚转之后,飞行员的控制逐渐回中(否则就一直滚转下去了),重心位置移动,升力轴线重又通过重心,恢复平衡,尽管这时飞机可能是歪着或前倾、后仰的。
事实上,为了在中速巡航时机身保持水平,以减小平飞阻力,直升机的重心通常都在旋翼圆心稍后的地方,这样旋翼可以自然向前倾斜一定的角度,而机身依然保持水平。但为了达到最大速度,机身应该前倾,也就是压低机头,这样好最大限度地发挥发动机功率,而不至于产生不必要的升力,本意要向前飞得快,结果速度没有上去多少,反而越飞越高了。
同样道理,从空中急降时,用周期距控制使机头高高仰起,旋翼后倾,既利用增加的机身迎风面积造成的阻力减速,又利用主旋翼向前的推力分量做反推力刹车,可以极快地减速、着陆,减少在敌人火力下的暴露时间。周期距控制也使直升机的侧飞、倒飞成为可能,既强化了悬停中对侧风的补偿能力,又极大地增强了对常规固定翼飞机来说匪夷所思的非常规机动性能。
5、直升机异乎寻常的起落性能提供了无数可能性,也带来无数的问题,其中一个就是翻滚问题。在侧风中垂直着陆时,机身在周期距控制下向迎风方向倾斜以保持平衡,这和侧风中骑自行车要歪着身子是一样道理。在悬停过程中,机身横滚的支点还是在重心,但一侧机轮首先接地时,机轮就变成支点,这时如果控制不当,就会“别住脚”,向外侧翻滚,造成事故。为了恢复水平,如果升力轴线在着地机轮的内侧,应该降低总距(减油门),用重力使机身正确落地;如果升力轴线在着地机轮外侧,那就应该增加总距(加油门),用升力来恢复水平姿态。用错了,就会发生翻滚事故。
没有侧风但是在起伏的舰船甲板上着陆,也有同样的问题。反过来的问题是在斜坡上起飞。飞行员必须小心地寻找旋翼水平的姿态,先将一侧机轮离地,机身达到水平状态,再增加升力,使另一侧机轮离地,达到升空。如果动作过急,在升力轴线还没有垂直时就匆忙离地,即使后离地的机轮没有拖地以造成不利滚动力矩,支点从后离地的机轮瞬时转移到机身重心所造成的剧烈摆动,可能使飞机失控。由于侧风和地面乱流的影响,旋翼水平还不一定就是正确的姿态,必须对侧风和乱流进行补偿,所以直升机在复杂条件下的起落需要相当的技巧。
6、侧风下垂直着陆,要防止支点突然转移到外侧机轮而引起翻滚的问题 / 斜坡上起飞,要注意不能太猛,否则重心突然从后离地的机轮向重心转移,会造成突然而剧烈的摆动,危害飞行安全。
7、旋翼是圆周运动,由于半径的关系,翼尖处线速度已经接近音速时,圆心处线速度为零!所以旋翼靠近圆周的地方产生最大的升力,而靠近圆心的地方只产生微不足道的升力。桨叶向前划行时,桨叶和空气的相对速度高于旋转本身所带来的线速度;
反之,桨叶向后划行时,桨叶和空气的相对速度就低于旋转本身所带来的线速度,这样,旋翼两侧产生的升力还不均匀,不做任何补偿的话,升力差可以达到 5:1。这个周期性的升力变化不仅使机身向一侧倾斜,而且每片桨叶在圆周中不同方位产生不同的升力和阻力,周期性地对桨叶产生强烈的扭曲,既大大加速材料的疲劳,又引起很大的振动。所以旋翼的气动设计可以比高性能固定翼飞机的机翼设计更为复杂。
8、直升机不光可以垂直起落,还可以悬停、侧飞、倒飞、原地转弯。直升机的这些非常规机动动作提供了空前的战术灵活性,比如,反坦克直升机可以在低于树梢的极低空高度悬停,在战机恰当的时刻,突然冒起来发射武器,然后迅速下降到树梢以下高度隐蔽,既可以躲避对方直射武器的打击,又有利于隐蔽地转移阵地。如果装备桅杆顶的观察装置装置的话,可以更好地隐蔽观察敌情、掌握战机。
同样的战术也适用于山脊、建筑物等适当的隐蔽物背后。在巷战中,直升机可以隐蔽在建筑物后悬停,在适当时机侧飞出来发射武器,然后迅速返回隐蔽位置,这样可以避开敌人从远处房顶的观察和伏击。在营救和精确定点空降作业中,悬停中的侧飞和倒飞更是必不可少的。然而,成也萧何,败也萧何,直升机的旋翼不光提供了空前的机动能力,也从根本上限制了前飞速度。旋翼尺寸和桨叶数的限制不谈,飞机的前飞速度不可能超过旋翼翼尖的线速度,在极限情况下,假定飞机的前飞速度和翼尖速度都为音速的一半,前行方向上,翼尖速度在 3 点钟方向已经达到音速,而后行方向上,翼尖在 9 点钟方向的速度就为零,要发生失速。
实际上,翼尖失速速度要高于零速度,所以飞行速度比理论上的极限情况要低。另外,由于半径的关系,旋翼前倾时,旋翼翼尖附近是产生推力的部分,中间部分的线速度低,实际上不产生推力,是在迎风气流的作用下像风车一样地自旋,靠近圆心的部分的线速度低于失速速度,已经处在失速区了。由于前飞时旋翼前倾,阻力在旋翼上形成一个向下的分量,造成速度越大,“降力”越大的尴尬局面,必须用增加的升力来补偿,白白浪费发动机功率。据计算,直升机的理论速度不能超过 420 公里/小时。英国 Westland 公司对旋翼翼尖进行加大后掠角的修形,使直升机速度有了不小的提高,但还是没有突破这个理论限制。
本文参考链接
http://www.sirenji.com/article/201109/6820.html
https://www.sohu.com/a/297705915_120091742
https://baike.baidu.com/item/%E6%97%8B%E7%BF%BC/8091472?fr=aladdin
https://www.sohu.com/a/224555701_175233
本文属于,收集资料参考学习,摘录了很多学术文章的内容,若有不正确的欢迎指正。