VS2012 MFC编程之USB-CAN II通讯上位机(1)
最近做实验需要用到上位机显示,所以编写了这个USB-CAN上位机通讯程序。本程序是采用MFC编写,通讯程序比较简单,主要是调用API函数(API的操作请参考相关说明文档)对下位机进行操作,下位机采集的数据再返回回上位机显示,显示部分使用了TeeChart控件,后面我会再次写博客介绍该控件的使用,这篇文章主要讲解如何编写CAN通讯的上位机程序。
(1)建立工程
先建立基于对话框的MFC工程,将ControlCAN.lib,ControlCAN.DLL,ControlCAN.h这三个文件拷贝到工程目录下,并在工程中添加头文件
#include "ControlCAN.h"接下来在项目属性页里的配置属性→连接器→输入→附加依赖项中添加ControlCAN.lib这个文件,或者直接在工程中添加如下代码:
#pragma comment(lib,"controlcan.lib")再添加DevType(设备类型),DevIndex(设备索引)这两个变量作为类的成员变量,变量的初始化值如下所示:
CPV_Test01Dlg::CPV_Test01Dlg(CWnd* pParent /*=NULL*/)
: CDialogEx(CPV_Test01Dlg::IDD, pParent)
// , m_chart(0)
, nDeviceType(4) //设备类型,对于USB-CAN2 配置为4
, nDeviceInd(0) //设备索引,只有一个USB-CAN适配器时,索引号为0
, nConnectFlag(0)
, nReceiveFlag(FALSE)
// , nFilterFlag(FALSE)
, szRXID(_T(""))
, szTXID(_T(""))
, szTXData(_T(""))
, pThread(NULL)
{
m_hIcon = AfxGetApp()->LoadIcon(IDI_ICON);
}至此,和CAN有关的配置基本完成。
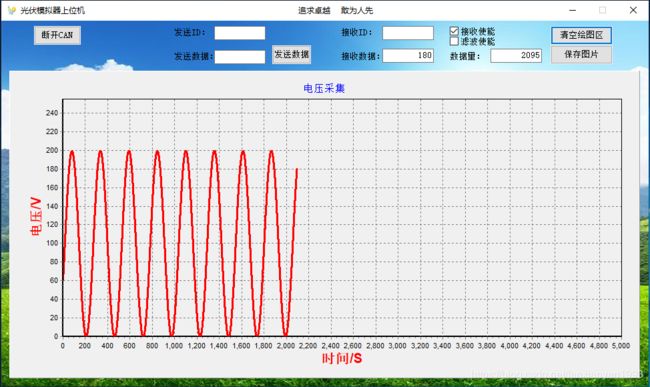
对话框如下所示:

(2)连接CAN
连接CAN的消息响应函数如下所示:
void CPV_Test01Dlg::OnBnClickedStart()
{
int nCANInd = 0; /* 第1个通道 */
DWORD dwRel;
VCI_INIT_CONFIG vic;
if(nConnectFlag == 0)
{
dwRel = VCI_OpenDevice(nDeviceType, nDeviceInd, 0);
if(!dwRel)
{
AfxMessageBox(_T("打开设备失败!"));
return;
}
nConnectFlag = 1;
GetDlgItem(IDC_START) ->SetWindowTextW(_T("断开CAN"));
vic.AccCode=0x80000008;
vic.AccMask=0xFFFFFFFF;
vic.Filter=1; //接收所有类型(扩展帧+标准帧)
vic.Timing0=0x00;
vic.Timing1=0x1C; //波特率500kbps
vic.Mode=0; //正常模式
dwRel = VCI_InitCAN(nDeviceType, nDeviceInd, nCANInd, &vic);
if(!dwRel)
{
AfxMessageBox(_T("初始化设备失败!"));
return;
}
dwRel = VCI_StartCAN(nDeviceType, nDeviceInd, nCANInd);
if(!dwRel)
{
VCI_CloseDevice(nDeviceType, nDeviceInd);
AfxMessageBox(_T("启动设备失败!"));
return;
}
AfxMessageBox(_T("设备启动成功!"));
}
else
{
dwRel = VCI_CloseDevice(nDeviceType, nDeviceInd);
if(dwRel != 1)
{
AfxMessageBox(_T("关闭设备失败!"));
return;
}
nConnectFlag = 0;
GetDlgItem(IDC_START) ->SetWindowTextW(_T("连接CAN"));
AfxMessageBox(_T("设备关闭成功!"));
}
}当点击“连接CAN”按钮时进入消息响应函数,根据标志位nConnectFlag判断设备是否已经连接。设备未连接时,调用API函数dwRel = VCI_OpenDevice(nDeviceType, nDeviceInd, 0)打开CAN设备,再将标志位置一,同时将按钮文字设置为“断开CAN”。
打开设备后再对设备进行初始化操作,先填充CAN初始化结构体VCI_INIT_CONFIG,主要是对波特率、收发模式、接收数据类型进行配置。配置好结构体之后调用CAN初始化函数dwRel = VCI_InitCAN(nDeviceType, nDeviceInd, nCANInd, &vic)初始化设备。
当设备连接成功后,标志位nConnectFlag=1,再次点击“断开CAN”按钮时调用关闭设备API函数dwRel = VCI_CloseDevice(nDeviceType, nDeviceInd)关闭CAN设备,再将标志位置零,同时将按钮文字设置为“连接CAN”。
(3)发送数据
点击发送按钮,调用的消息响应函数如下所示:
void CPV_Test01Dlg::OnBnClickedSend()
{
UpdateData(TRUE);
DWORD dwRel;
CString str;
VCI_CAN_OBJ frameinfo;
int nCANInd = 0;
frameinfo.DataLen = 1;
frameinfo.RemoteFlag =0;
frameinfo.ExternFlag =1;
frameinfo.SendType =0;
frameinfo.ID =_wtoi(szTXID);
// frameinfo.ID =0xFF;
frameinfo.Data[0] = _wtoi(szTXData);
// frameinfo.Data[0] =123;
dwRel = VCI_Transmit(nDeviceType,nDeviceInd,nCANInd,&frameinfo,1); //发送帧数不宜过大
if(dwRel==-1)
{
AfxMessageBox(_T("数据发送失败!"));
return;
}
// AfxMessageBox(_T("数据发送成功!"));
}在发送数据函数中,先调用UpdateData(TRUE)将对话框中配置的数据(主要配置发送ID、数据类型、发送的数据等)调回到内存变量中,再配置CAN帧结构体VCI_CAN_OBJ,最后调用API发送数据函数dwRel = VCI_Transmit(nDeviceType,nDeviceInd,nCANInd,&frameinfo,1),该函数最后的一个变量为发送的帧数量,通过测试发现,该值不能设置得过大,设置得过大会导致发送数据时接收数据出错,一般以实际要发送的帧数量为准。
(4)接收数据
下位机发送数据给上位机,通过配置接收线程来接收数据。点击接收数据复选框时调用以下函数开启线程,函数如下所示:
void CPV_Test01Dlg::OnBnClickedReceive()
{
UpdateData(TRUE);
if(nReceiveFlag)
{
pThread = AfxBeginThread(ReceiveThread,0); //开启线程
nStopFlag=0;
}
else
{
nStopFlag=1;
}
}在接收线程函数中接收数据,接收线程函数必须定义为类的静态成员函数或者全局函数,不然会报错。接收线程函数如下所示:
unsigned int CPV_Test01Dlg::ReceiveThread(void* param)
{
CPV_Test01Dlg *dlg=(CPV_Test01Dlg*) AfxGetApp()->GetMainWnd(); //获取主窗口指针
VCI_CAN_OBJ frameinfo[2500];
int len;
CString str,szID;
while(1)
{
len = VCI_Receive(dlg ->nDeviceType,dlg ->nDeviceInd,0,frameinfo,2500,0); //2500为接收缓存区,尽量设大,避免数据溢出
if(len>=1)
for(int num=0;numGetDlgItemTextW(IDC_RXID,szID);
str.Format(_T("%d"),frameinfo[num].ID);
if(BST_UNCHECKED == dlg ->m_checkFilter.GetCheck()||
(BST_CHECKED == dlg ->m_checkFilter.GetCheck()&&str==szID))
{
dlg ->m_chart.Series(0).AddXY(nCount,frameinfo[num].Data[0],NULL,NULL);
str.Format(_T("%d"),frameinfo[num].Data[0]);
dlg ->SetDlgItemTextW(IDC_RXDATA,str);
nCount++;
str.Format(_T("%d"),nCount);
dlg ->SetDlgItemTextW(IDC_RXDATANUMBER,str);
}
}
Sleep(1); //进程延时1ms
if(nStopFlag)
break; //退出while循环
}
return TRUE;
} 接收线程函数为类内的静态成员函数,不能访问类内的成员变量,通过*dlg=(CPV_Test01Dlg*) AfxGetApp()->GetMainWnd()获取类的指针,进而访问类内的成员变量。通过调用API函数len = VCI_Receive(dlg ->nDeviceType,dlg ->nDeviceInd,0,frameinfo,2500,0)来获取接收数据的信息,接收帧信息存放在结构体变量frameinfo中。接收数据的缓存区尽可能的设大以防止数据的丢失。
(5)总结
下位机通过STM32单片机配置好后,下位机采集到的数据通过CAN收发器发送出来,最后在上位机中显示。发送数据的速率不宜过快,太快会导致数据丢失。
上位机软件界面如下所示:
提问方式:有啥不懂的可以随时向我提问哈,扫描下方二维码我会在第一时间给大家回复的哈,谢谢。
