线性回归的N种姿势
1. Naive Solution
We want to find x̂ x ^ that minimizes:
Another way to think about this is that we are interested in where vector b b is closest to the subspace spanned by A A (called the range of A A ). Ax̂ A x ^ is the projection of b b onto A A . Since b−Ax̂ b − A x ^ must be perpendicular to the subspace spanned by A A , we see that
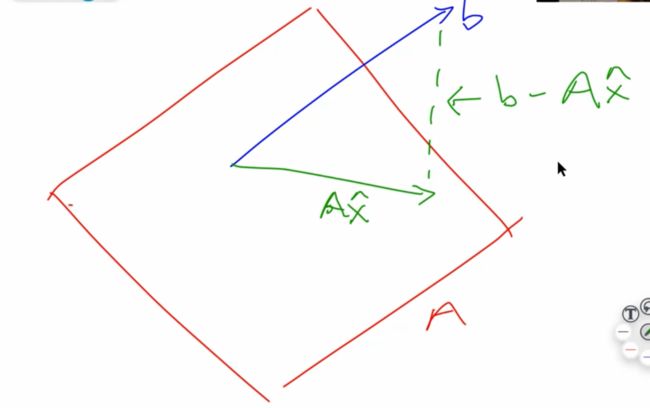
(we are using AT A T because we want to multiply each column of A A by b−Ax̂ b − A x ^
This leads us to the normal equations:
但是这种方法不是很practical,因为要求矩阵的逆,比较麻烦。
def ls_naive(A, b):
# not practical,因为直接求了矩阵的逆,很麻烦
return np.linalg.inv(A.T @ A) @ A.T @ b
coeffs_naive = ls_naive(trn_int, y_trn)
regr_metrics(y_test, test_int @ coeffs_naive)2. Cholesky Factorization
Normal equations:
If A A has full rank, the pseudo-inverse (ATA)−1AT ( A T A ) − 1 A T is a square, hermitian positive definite matrix.
【注意】Cholesky一定要是正定矩阵!虽然这个操作又快又好,但是使用场景有限!
The standard way of solving such a system is Cholesky Factorization, which finds upper-triangular R such that ATA=RTR A T A = R T R . ( RT R T is lower-triangular )
AtA = A.T @ A
Atb = A.T @ b
R = scipy.linalg.cholesky(AtA)
# check our factorization
np.linalg.norm(AtA - R.T @ R)Q:为啥变成 RTRx=ATb R T R x = A T b 会变简单?
之前提过,上三角矩阵解线性方程组时会简单许多(最后一行只有一个未知数)。
所以先求 RTw=ATb R T w = A T b 再求 Rx=w R x = w 会easier。
def ls_chol(A, b):
R = scipy.linalg.cholesky(A.T @ A)
w = scipy.linalg.solve_triangular(R, A.T @ b, trans='T')
return scipy.linalg.solve_triangular(R, w)
%timeit coeffs_chol = ls_chol(trn_int, y_trn)3. QR Factorization
Q Q is orthonormal, R R is upper-triangular.
Then once again, Rx R x is easier to solve than Ax A x .
def ls_qr(A,b):
Q, R = scipy.linalg.qr(A, mode='economic')
return scipy.linalg.solve_triangular(R, Q.T @ b)
coeffs_qr = ls_qr(trn_int, y_trn)
regr_metrics(y_test, test_int @ coeffs_qr)4. SVD
都是同样的问题,要求 x x 。 U U 的column orthonormal, ∑ ∑ 是对角阵, V V 是row orthonormal.
解 Σw=UTb Σ w = U T b 甚至比上三角矩阵 R R 更简单(每行只有一个未知量)。然后 Vx=w V x = w 又可以直接用orthonormal的性质,直接等于 VTw V T w 。
SVD gives the pseudo-inverse.
def ls_svd(A,b):
m, n = A.shape
U, sigma, Vh = scipy.linalg.svd(A, full_matrices=False, lapack_driver='gesdd')
w = (U.T @ b)/ sigma
return Vh.T @ w
coeffs_svd = ls_svd(trn_int, y_trn)
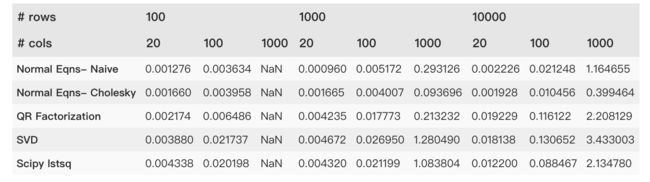
regr_metrics(y_test, test_int @ coeffs_svd)5. Timing Comparison
Matrix Inversion: 2n3 2 n 3
Matrix Multiplication: n3 n 3
Cholesky: 13n3 1 3 n 3
QR, Gram Schmidt: 2mn2 2 m n 2 , m≥n m ≥ n (chapter 8 of Trefethen)
QR, Householder: 2mn2−23n3 2 m n 2 − 2 3 n 3 (chapter 10 of Trefethen)
Solving a triangular system: n2 n 2
Why Cholesky Factorization is Fast:
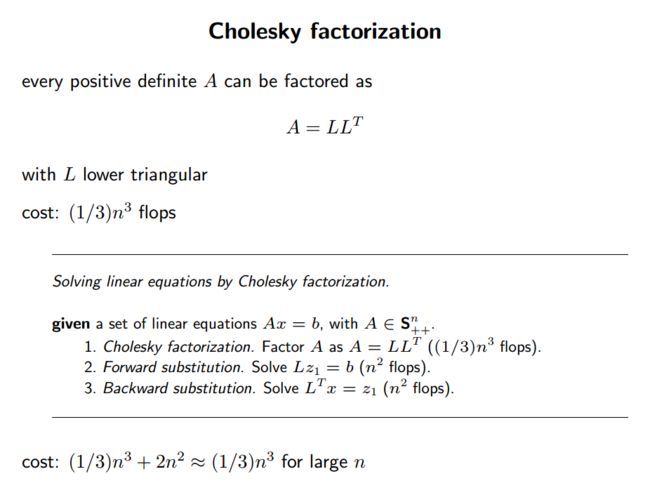
(source: Stanford Convex Optimization: Numerical Linear Algebra Background Slides)