Canny算法实现车道线检测
算法基于Python3.6实现
Python库
- opencv-python
- matplotlib
- numpy
下图是测试结果。

详细流程
- 输入图片并将其转换为灰度图
- 通过高斯滤波平滑图片去噪
- 使用Canny算法检测边缘
- 提取感兴趣候选区域
- 霍夫变换,直线检测
- 直线拟合得到车道线
图像处理
Candy算法介绍可以参考:https://blog.csdn.net/sc944201630/article/details/81272154
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图片
def load_image(path, show_img=False):
img = cv2.imread(path)
if(show_img):
cv2.imshow("original img", img)
cv2.waitKey(-1) # 按下任意键继续
return img
# 对图片进行灰度化,能加速边缘检测
def image_gray(img, show_gray=False, save_gray_img=False):
img_gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
if show_gray:
cv2.imshow("gray_image", img_gray)
cv2.waitKey(-1)
if save_gray_img:
cv2.imwrite("./gray_img.jpg", img_gray)
return img_gray
# canny 算法,边缘检测
# cv2.Canny()参数:分别是输入图片,较小阈值和较大阈值
def canny_edge(img, g_kernel, g_dev, lth, hth, show_img=False, save_img=False):
# 高斯滤波
# (g_kernel, g_kernel) 高斯滤波的大小设置
# g_dev: 高斯滤波的标准差,如果设置为0.0即自动生成
# 滤波效果由标准差来决定
img_gaussian = cv2.GaussianBlur(img, (g_kernel, g_kernel), g_dev)
img_edge = cv2.Canny(img_gaussian, lth, hth)
if save_img:
cv2.imwrite("./img_edge.jpg", img_edge)
if show_img:
cv2.imshow("img_edge", img_edge)
cv2.waitKey(-1)
return img_edge
我们得到的边缘信息图片如下:
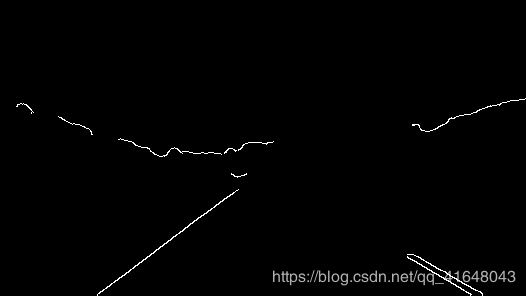
边缘处理
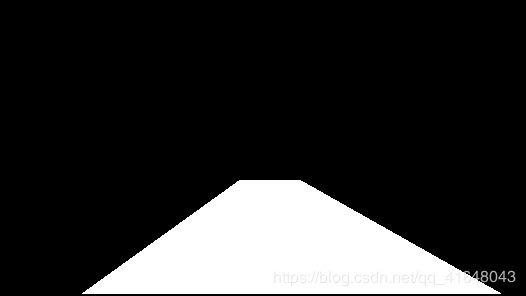
得到边缘信息之后我们需要提取感兴趣候选区域,感兴趣候选区域可通过代码自动提取,但这里我们是手动提取感兴趣候选区域。
# 提取感兴趣候选区域
# 显示图片,获取车道线坐标
# plt.imshow(img)
# plt.show()
# 提取区域,创建掩膜
def get_mask(img, show_img=False, save_img=False):
mask = np.zeros_like(img)
# 两条车道线的顶点(每条线两个顶点)
vertices = np.array([[82,293], [239, 180],[300, 180], [500, 293]])
cv2.fillPoly(mask, [vertices], 255)
if save_img:
cv2.imwrite("./mask.jpg", mask)
if show_img:
cv2.imshow("mask", mask)
cv2.waitKey(-1)
return mask
# 对掩膜和边缘图片进行与操作得到感兴趣候选区域(roi)
def bitwise(img_edge, mask, show_img=False, save_img=False):
img_edge_roi = cv2.bitwise_and(img_edge, mask)
if save_img:
cv2.imwrite("./img_edge_roi.jpg", img_edge_roi)
if show_img:
cv2.imshow("img_edge_roi", img_edge_roi)
cv2.waitKey(-1)
return img_edge_roi
# 直线检测, 霍夫变换
# 参数: 输入图片 直线最小角度 最小距离 阈值 最短直线长度 直线间的最大间距
def hough_lines(roi, threshold, min_angle, min_d, min_length, max_gap, save_line=False):
lines = cv2.HoughLinesP(roi, threshold, min_angle, min_d, minLineLength=min_length, maxLineGap=max_gap)
# print(lines)
# print(lines.shape)
img_line = np.zeros_like(roi)
for line in lines:
for x1, y1, x2, y2 in line:
cv2.line(img_line, (x1,y1),(x2,y2),[0,0,255],2)
if save_line:
cv2.imwrite("./img_lane.jpg", img_line)
cv2.imshow("img_line", img_line)
cv2.waitKey(-1)
return lines
掩膜:
霍夫直线检测结果:

直线拟合
最后,通过直线拟合得到车道线。
主要有以下三个步骤:
- 根据正负斜率将线段划分为左右车道线
- 计算左右车道线斜率的平均值,并计算斜率和均值的差值,舍去差值最大的车道线
- 直线拟合,求得车道线端点。(通过最小二乘法实现)
def clean_lines(lines, threshold):
# 迭代计算斜率均值,排除掉与差值差异较大的数据
slope = [(y2 - y1) / (x2 - x1) for line in lines for x1, y1, x2, y2 in line]
while len(lines) > 0:
mean = np.mean(slope)
diff = [abs(s - mean) for s in slope]
idx = np.argmax(diff)
if diff[idx] > threshold:
slope.pop(idx)
lines.pop(idx)
else:
break
def least_squares_fit(point_list, ymin, ymax):
# 最小二乘法拟合
x = [p[0] for p in point_list]
y = [p[1] for p in point_list]
# polyfit第三个参数为拟合多项式的阶数,所以1代表线性
fit = np.polyfit(y, x, 1)
fit_fn = np.poly1d(fit) # 获取拟合的结果
xmin = int(fit_fn(ymin))
xmax = int(fit_fn(ymax))
return [(xmin, ymin), (xmax, ymax)]
def draw_lane(img, lines, color=[255,0,0],thickness=8):
# 划分左右车道
left_lines, right_lines = [], []
for line in lines:
for x1,y1,x2,y2 in line:
k = (y2-y1)/(x2-x1)
if k<0:
left_lines.append(line)
else:
right_lines.append(line)
assert len(left_lines)>0 and len(right_lines)>0, "line error, no left or no right"
# NMS清理直线
clean_lines(left_lines, 0.1)
clean_lines(right_lines, 0.1)
# 得到左右车道线点的集合,拟合直线
left_points = [(x1, y1) for line in left_lines for x1, y1, x2, y2 in line]
left_points.extend([(x2, y2) for line in left_lines for x1, y1, x2, y2 in line])
right_points = [(x1, y1) for line in right_lines for x1, y1, x2, y2 in line]
right_points.extend([(x2, y2) for line in right_lines for x1, y1, x2, y2 in line])
left_results = least_squares_fit(left_points, 180, img.shape[0])
right_results = least_squares_fit(right_points, 180, img.shape[0])
vtxs = np.array([[left_results[1], left_results[0], right_results[0], right_results[1]]])
# 填充车道区域
cv2.fillPoly(img, vtxs, (0, 255, 0))
cv2.imwrite("./result.jpg", img)
cv2.imshow("img_lane", img)
cv2.waitKey(-1)
# 或者画车道线
# cv2.line(img, left_results[0], left_results[1], (0, 0, 255), thickness)
# cv2.line(img, right_results[0], right_results[1], (0, 0, 255), thickness)
视频处理
视频处理我采用了opencv-python作为视频处理库
# 为了方便请注释掉图片处理时所有的图片显示代码
# hough_lines里面有画霍夫变换的结果
# draw_lane里面有显示最终图片结果代码
def process_an_image(img):
# img = load_image("./test.jpg")
# video = cv2.VideoCapture("./highway1.avi")
# _, img = video.read()
# plt.imshow(img)
# plt.show() # 视频的掩膜区域与图片不同,需重新标定
gray_img = image_gray(img)
img_edge = canny_edge(gray_img, 11, 0.0, 90, 180, show_img=False)
mask = get_mask(img_edge, show_img=False)
roi = bitwise(img_edge, mask, show_img=False)
lines = hough_lines(roi, 1, np.pi/180, 20, 10, 10)
draw_lane(img, lines)
if __name__=="__main__":
output_test = "./highway_result.mp4"
video = cv2.VideoCapture("./highway1.avi")
fps = video.get(cv2.CAP_PROP_FPS)
# frameCount = video.get(cv2.CAP_PROP_FRAME_COUNT)
size = (int(video.get(cv2.CAP_PROP_FRAME_WIDTH)), int(video.get(cv2.CAP_PROP_FRAME_HEIGHT)))
videoWriter = cv2.VideoWriter(output_test, cv2.VideoWriter_fourcc(*'MP4V'), fps, size)
success, img = video.read()
while success:
process_an_image(img)
videoWriter.write(img)
success, img = video.read()
print("success")
视频帧处理时可能遇到没有左车道线或没有右车道线的情况,可以将代码里的断言改为return,遇到这种帧直接返回。
opencv-python库读写视频可以参考:https://blog.csdn.net/weixin_42527719/article/details/85694544
参考:https://www.cnblogs.com/gezhuangzhuang/p/10738496.html