华大HC32F005单片机开发
文章目录
- 芯片简介
- 开发环境
- Cortex-M0+内核
- 基本功能开发
- gpio配置
- 外部中断
- 时钟配置
- 基本定时器
- 延时函数
- 特殊管脚配置
- 休眠模式
- 看门狗
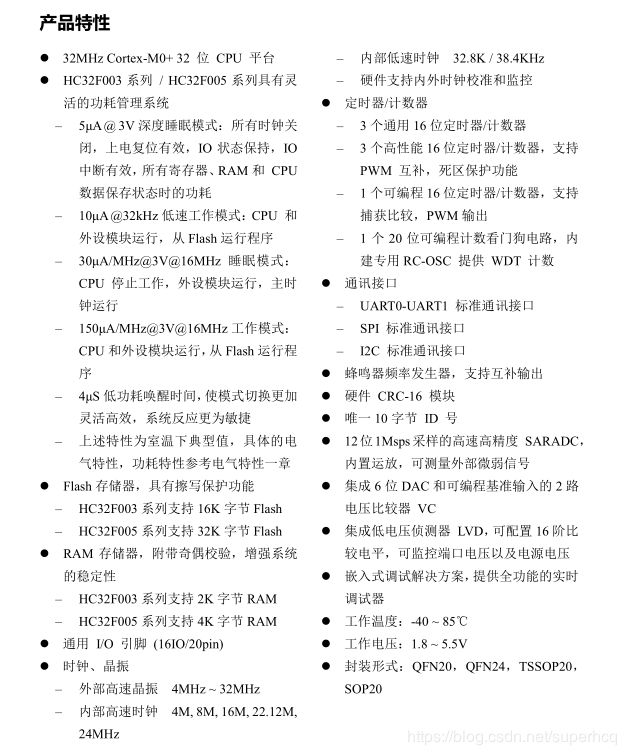
芯片简介
开发环境
使用Keil作为开发IDE。
第一次使用需要安装HDSC的Device支持包。可以通过Pack Installer安装或从HDSC官网下载Device支持包,拷贝到keil源目录。
安装后,创建工程时,选择MCU型号一栏选择HDSC系列可见,表示可以安装环境正常。
Cortex-M0+内核
华大HC32F005系列单片机采用了Cortex-M0+的内核。
Cortex-M0+内核内置了嵌套向量中断控制器(NVIC),参考内核的头文件(安装路径下D:\Keil_v5\ARM\Pack\ARM\CMSIS\4.2.0\CMSIS\Include)
/** \brief Enable External Interrupt */
void NVIC_EnableIRQ(IRQn_Type IRQn);
/** \brief Disable External Interrupt */
void NVIC_DisableIRQ(IRQn_Type IRQn);
/** \brief Get Pending Interrupt */
uint32_t NVIC_GetPendingIRQ(IRQn_Type IRQn);
/** \brief Set Pending Interrupt */
void NVIC_SetPendingIRQ(IRQn_Type IRQn);
/** \brief Clear Pending Interrupt */
void NVIC_ClearPendingIRQ(IRQn_Type IRQn);
/** \brief Set Interrupt Priority */
void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority);
/** \brief Get Interrupt Priority */
uint32_t NVIC_GetPriority(IRQn_Type IRQn);
/** \brief System Reset */
void NVIC_SystemReset(void);
/*@} end of CMSIS_Core_NVICFunctions */
通过以上Cortex-M0+提供的中断操作接口来配置系统中断。
基本功能开发
gpio配置
/**
*******************************************************************************
** \brief GPIO 初始化2
**
** \param [in] u8Port IO Port口
** \param [in] u8Pin IO Pin脚
** \param [in] enDir IO 方向(输入或输出)
** \param [in] bPullup 上拉开关
** \param [in] bPulldown 下拉开关
** \param [in] bOdr 开漏开关
** \param [in] bDrive 驱动能力
** 0 = 高
** 1 = 低
** \retval Ok 设置成功
** 其他值 设置失败
******************************************************************************/
en_result_t Gpio_InitIOExt(uint8_t u8Port, uint8_t u8Pin,
en_gpio_dir_t enDir,
boolean_t bPullup,
boolean_t bPulldown,
boolean_t bOdr,
boolean_t bDrive);
根据实际使用要求配置成上拉、下拉、开漏、驱动能力模式。
无特殊要求的gpio可以简化配置:
en_result_t Gpio_InitIO(uint8_t u8Port, uint8_t u8Pin, en_gpio_dir_t enDir);
外部中断
外部中断配置流程:
void Gpio_IRQHandler(uint8_t u8Param)
{
if (Gpio_GetIrqStat(WL_WAKEUP_GPIO, WL_WAKEUP_GPIO_Pin) == 1) {
Gpio_ClearIrq(WL_WAKEUP_GPIO, WL_WAKEUP_GPIO_Pin);
}
}
void gpio_config(void)
{
Gpio_Init(GPIO, GPIO_Pin, GpioDirIn);
// clear irq flag
Gpio_ClearIrq(GPIO, GPIO_Pin);
// enable irq
Gpio_EnableIrq(GPIO, GPIO_Pin, GpioIrqFalling);
EnableNvic(PORT0_IRQn, DDL_IRQ_LEVEL_DEFAULT, TRUE);
}
void gpio_deinit(void)
{
Gpio_DisableIrq(GPIO, GPIO_Pin, GpioIrqRising);
Gpio_ClearIrq(GPIO, GPIO_Pin);
}
时钟配置
HC32F005芯片支持内部高速时钟(4M、8M、16M、24M)可配,低速时钟32.8K。
时钟初始化流程如下所示:
void clk_init(void)
{
stc_clk_config_t stcCfg;
/* set system freq */
Clk_SetRCHFreq(ClkFreq16Mhz);
/* CLK config */
DDL_ZERO_STRUCT(stcCfg);
stcCfg.enClkSrc = ClkRCH; // RCH = 16M
stcCfg.enHClkDiv = ClkDiv1; // HCLK = 16M/1
stcCfg.enPClkDiv = ClkDiv1; // PCLK = 16M/1/1
Clk_Enable(ClkRCL, TRUE);
Clk_Enable(ClkRCH, TRUE);
Clk_Init(&stcCfg);
/* open peripheral clk */
Clk_SetPeripheralGate(ClkPeripheralGpio, TRUE);
Clk_SetPeripheralGate(ClkPeripheralBt, TRUE);
Clk_SetPeripheralGate(ClkPeripheralWdt,TRUE);
}
基本定时器
Timer0/1/2可以作为三个16位自动重载或32位无重载定时器/计数器使用。
例如,需要配置100us间隔定时器,参考代码:
void timer_irq_handler(void)
{
if (Bt_GetIntFlag(TIM0)) {
Bt_ClearIntFlag(TIM0);
}
}
void timer_init(void)
{
stc_bt_config_t stcConfig;
uint16_t u16ArrData = (0xffff - 0x190);
uint16_t u16InitCntData = 0xC000;
/* (0xffff - x) * y = 100us * 16M */
stcConfig.enGateP = BtPositive;
stcConfig.enGate = BtGateDisable;
stcConfig.enPRS = BtPCLKDiv4;
stcConfig.enTog = BtTogDisable;
stcConfig.enCT = BtTimer;
stcConfig.enMD = BtMode2;
stcConfig.pfnTim0Cb = timer_irq_handler;
Bt_Init(TIM0, &stcConfig);
// TIM1 enable interrupt
Bt_ClearIntFlag(TIM0);
Bt_EnableIrq(TIM0);
EnableNvic(TIM0_IRQn, 3, TRUE);
// set load value and calc value
Bt_ARRSet(TIM0, u16ArrData);
Bt_Cnt16Set(TIM0, u16InitCntData);
Bt_Run(TIM0);
}
延时函数
官方历程库ddl.c中提供了一组延时函数:
void delay1ms(uint32_t u32Cnt);
void delay100us(uint32_t u32Cnt);
这组函数使用轮询的方式来做延时,对于需要精确延时的场景不能满足要求。
可以采用通用的定时器方式来实现,参考如下:
static uint16_t timer_timeout = 0;
void timer_irq_handler(void)
{
if (Bt_GetIntFlag(TIM0)) {
Bt_ClearIntFlag(TIM0);
/* 100us timer */
if (timer_timeout != 0) {
timer_timeout--;
}
}
}
void sleep_100us(unsigned short usec)
{
timer_timeout = usec;
while(timer_timeout != 0);
}
特殊管脚配置
- RESET管脚复用
RESET管脚默认作为复位输入端口,低有效;
RESET管脚复用成普通IO口使用时,只支持输入模式;
启动后需要配置管脚复用:Clk_SetFunc(ClkFuncRstPinIOEn, TRUE); - SWD管脚复用
SWD管脚复用成普通IO口使用时,无法进入调试模式;
启动后需要配置管脚复用:Clk_SetFunc(ClkFuncSwdPinIOEn, TRUE);
如果需要通过SWD烧录程序,那么在设备上电后,最好延时2-3s,预留烧录初始化的时间再配置复用。否则设置了复用后会导致无法使用SWD功能。
休眠模式
进入休眠前可以配置休眠模式,可选:
- 深度睡眠(5uA@3V)
- 低速模式深度睡眠([email protected])
- 浅度睡眠三种模式(30uA/MHz@3V)
进入休眠的代码:__WFI();
在休眠模式下,可以使用外部中断触发唤醒设备,需要在设备休眠前配置使能中断。
看门狗
该型号HC32F005系列的看门狗,支持设置看门狗超时重启和超时进中断两种模式;
缺陷:开门狗一旦开启,无法关闭或停止;
特殊使用场景下需要做特殊处理,例如:需要设备在运行和休眠模式切换时,进入休眠前无法关闭看门狗。此处处理方法为:
- 设置看门狗中断,不使能看门狗重启;
- 在看门狗中断中根据使用场景来选择重启设备。
重启设备的代码:NVIC_SystemReset();