单目测距原理与实现
Opencv3实现单目视觉测距
- 一、写在前面的话
- 二、单目测距原理
- 三、实现代码
- 四、运行结果
一、写在前面的话
刚刚接触Opencv没多久,为了检验自己最近学习的内容,准备做一下单目视觉测距。网上有很多关于单目测距的文章,我这里主要借鉴的是OpenCV学习笔记(二十一)——简单的单目视觉测距尝试和单目摄像机测距(python+opencv)两篇文章,在这里特别作出说明。
工作环境:Ubuntu16.04 + Opencv3.4.0 + Pycharm
摄像头:本着一切从简的原则(好吧就是穷),选用了一款物美价廉的摄像头PS3专用PlayStation Eye, 只要27.5人民币。(这里贴一下淘宝链接,不是打广告,大家完全可以采用其他的摄像头或者工业相机。)
二、单目测距原理
单目相机测距常用或者说实用的方法就是相似三角形法,为了让大家更好地理解程序,这里简单说一下相似三角形法。
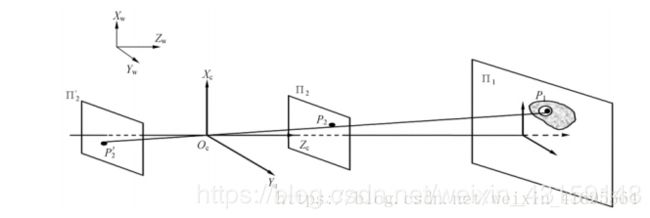
举个栗子,假设现在我们有一张A4纸(8.27in x 11.69in), in代表英寸,1in = 25.4mm。纸张宽度W=11.69in,相机距离纸张的距离D = 32in,此时拍下的照片中A4纸的像素宽度为P=192px(我的相机实际测量得到的值)。
此时我们可以算出焦距F=(192x30)/11.69。
当我们将摄像头远离或者靠近A4纸时,就可以用相似三角形得到相机距离物体的距离。
此时的距离: D’ = (W’ x F ) / P’
(注意:这里测量的距离是相机到物体的垂直距离,产生夹角,测量的结果就不准确了。)
三、实现代码
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# Date: 18-10-29
import numpy as np # 导入numpy库
import cv2 # 导入Opencv库
KNOWN_DISTANCE = 32 # 这个距离自己实际测量一下
KNOWN_WIDTH = 11.69 # A4纸的宽度
KNOWN_HEIGHT = 8.27
IMAGE_PATHS = ["Picture1.jpg", "Picture2.jpg", "Picture3.jpg"] # 将用到的图片放到了一个列表中
# 定义目标函数
def find_marker(image):
gray_img = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 将彩色图转化为灰度图
gray_img = cv2.GaussianBlur(gray_img, (5, 5), 0) # 高斯平滑去噪
edged_img = cv2.Canny(gray_img, 35, 125) # Canny算子阈值化
cv2.imshow("降噪效果图", edged_img) # 显示降噪后的图片
# 获取纸张的轮廓数据
img, countours, hierarchy = cv2.findContours(edged_img.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
# print(len(countours))
c = max(countours, key=cv2.contourArea) # 获取最大面积对应的点集
rect = cv2.minAreaRect(c) # 最小外接矩形
return rect
# 定义距离函数
def distance_to_camera(knownWidth, focalLength, perWidth):
return (knownWidth * focalLength) / perWidth
# 计算摄像头的焦距(内参)
def calculate_focalDistance(img_path):
first_image = cv2.imread(img_path) # 这里根据准备的第一张图片,计算焦距
# cv2.imshow('first image', first_image)
marker = find_marker(first_image) # 获取矩形的中心点坐标,长度,宽度和旋转角度
focalLength = (marker[1][0] * KNOWN_DISTANCE) / KNOWN_WIDTH # 获取摄像头的焦距
# print(marker[1][0])
print('焦距(focalLength) = ', focalLength) # 打印焦距的值
return focalLength
# 计算摄像头到物体的距离
def calculate_Distance(image_path, focalLength_value):
image = cv2.imread(image_path)
# cv2.imshow("原图", image)
marker = find_marker(image) # 获取矩形的中心点坐标,长度,宽度和旋转角度, marke[1][0]代表宽度
distance_inches = distance_to_camera(KNOWN_WIDTH, focalLength_value, marker[1][0])
box = cv2.boxPoints(marker)
# print("Box = ", box)
box = np.int0(box)
print("Box = ", box)
cv2.drawContours(image, [box], -1, (0, 255, 0), 2) # 绘制物体轮廓
cv2.putText(image, "%.2fcm" % (distance_inches * 2.54), (image.shape[1] - 300, image.shape[0] - 20),
cv2.FONT_HERSHEY_SIMPLEX, 2.0, (0, 255, 0), 3)
cv2.imshow("单目测距", image)
if __name__ == "__main__":
img_path = "Picture1.jpg"
focalLength = calculate_focalDistance(img_path)
for image_path in IMAGE_PATHS:
calculate_Distance(image_path, focalLength)
cv2.waitKey(0)
cv2.destroyAllWindows()四、运行结果
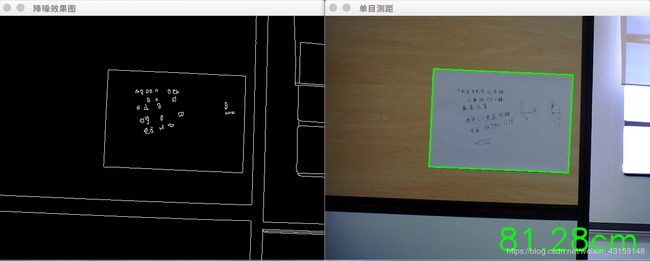
第一张照片:
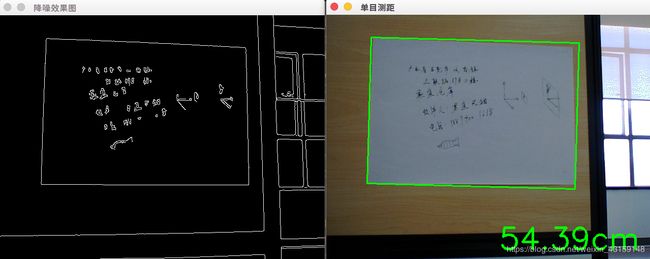
第二张照片:
第三张照片:

后面准备做一下双目测距,各位朋友可以在评论区留言,大家相互交流。