【开源项目】基于Opencv的视频车速检测
【开源项目】基于Opencv的视频车速检测
- 1. 源码地址:
- 2. 效果图:
- 3. 代码:
1. 源码地址:
https://github.com/shreyapamecha/Speed-Estimation-of-Vehicles-with-Plate-Detection
2. 效果图:
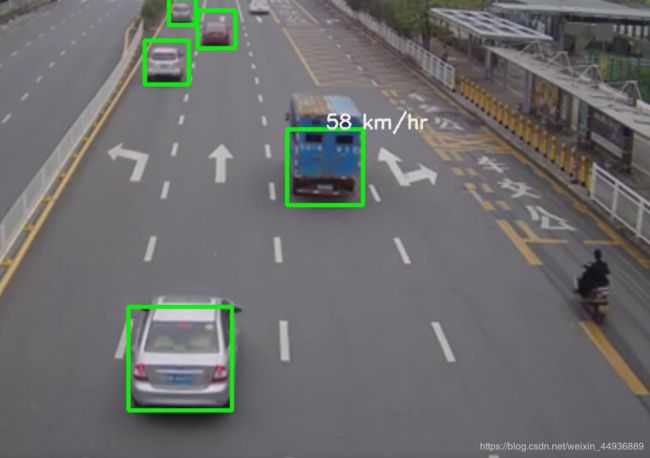
3. 代码:
import cv2
import dlib
import time
import threading
import math
carCascade = cv2.CascadeClassifier('myhaar.xml')
video = cv2.VideoCapture('cars.mp4')
WIDTH = 1280
HEIGHT = 720
def estimateSpeed(location1, location2):
d_pixels = math.sqrt(math.pow(location2[0] - location1[0], 2) + math.pow(location2[1] - location1[1], 2))
# ppm = location2[2] / carWidht
ppm = 8.8
d_meters = d_pixels / ppm
#print("d_pixels=" + str(d_pixels), "d_meters=" + str(d_meters))
fps = 18
speed = d_meters * fps * 3.6
return speed
def trackMultipleObjects():
rectangleColor = (0, 255, 0)
frameCounter = 0
currentCarID = 0
fps = 0
carTracker = {}
carNumbers = {}
carLocation1 = {}
carLocation2 = {}
speed = [None] * 1000
# Write output to video file
out = cv2.VideoWriter('outpy.avi',cv2.VideoWriter_fourcc('M','J','P','G'), 10, (WIDTH,HEIGHT))
while True:
start_time = time.time()
rc, image = video.read()
if type(image) == type(None):
break
image = cv2.resize(image, (WIDTH, HEIGHT))
resultImage = image.copy()
frameCounter = frameCounter + 1
carIDtoDelete = []
for carID in carTracker.keys():
trackingQuality = carTracker[carID].update(image)
if trackingQuality < 7:
carIDtoDelete.append(carID)
for carID in carIDtoDelete:
print ('Removing carID ' + str(carID) + ' from list of trackers.')
print ('Removing carID ' + str(carID) + ' previous location.')
print ('Removing carID ' + str(carID) + ' current location.')
carTracker.pop(carID, None)
carLocation1.pop(carID, None)
carLocation2.pop(carID, None)
if not (frameCounter % 10):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
cars = carCascade.detectMultiScale(gray, 1.1, 13, 18, (24, 24))
for (_x, _y, _w, _h) in cars:
x = int(_x)
y = int(_y)
w = int(_w)
h = int(_h)
x_bar = x + 0.5 * w
y_bar = y + 0.5 * h
matchCarID = None
for carID in carTracker.keys():
trackedPosition = carTracker[carID].get_position()
t_x = int(trackedPosition.left())
t_y = int(trackedPosition.top())
t_w = int(trackedPosition.width())
t_h = int(trackedPosition.height())
t_x_bar = t_x + 0.5 * t_w
t_y_bar = t_y + 0.5 * t_h
if ((t_x <= x_bar <= (t_x + t_w)) and (t_y <= y_bar <= (t_y + t_h)) and (x <= t_x_bar <= (x + w)) and (y <= t_y_bar <= (y + h))):
matchCarID = carID
if matchCarID is None:
print ('Creating new tracker ' + str(currentCarID))
tracker = dlib.correlation_tracker()
tracker.start_track(image, dlib.rectangle(x, y, x + w, y + h))
carTracker[currentCarID] = tracker
carLocation1[currentCarID] = [x, y, w, h]
currentCarID = currentCarID + 1
#cv2.line(resultImage,(0,480),(1280,480),(255,0,0),5)
for carID in carTracker.keys():
trackedPosition = carTracker[carID].get_position()
t_x = int(trackedPosition.left())
t_y = int(trackedPosition.top())
t_w = int(trackedPosition.width())
t_h = int(trackedPosition.height())
cv2.rectangle(resultImage, (t_x, t_y), (t_x + t_w, t_y + t_h), rectangleColor, 4)
# speed estimation
carLocation2[carID] = [t_x, t_y, t_w, t_h]
end_time = time.time()
if not (end_time == start_time):
fps = 1.0/(end_time - start_time)
#cv2.putText(resultImage, 'FPS: ' + str(int(fps)), (620, 30),cv2.FONT_HERSHEY_SIMPLEX, 0.75, (0, 0, 255), 2)
for i in carLocation1.keys():
if frameCounter % 1 == 0:
[x1, y1, w1, h1] = carLocation1[i]
[x2, y2, w2, h2] = carLocation2[i]
# print 'previous location: ' + str(carLocation1[i]) + ', current location: ' + str(carLocation2[i])
carLocation1[i] = [x2, y2, w2, h2]
# print 'new previous location: ' + str(carLocation1[i])
if [x1, y1, w1, h1] != [x2, y2, w2, h2]:
if (speed[i] == None or speed[i] == 0) and y1 >= 275 and y1 <= 285:
speed[i] = estimateSpeed([x1, y1, w1, h1], [x2, y2, w2, h2])
#if y1 > 275 and y1 < 285:
if speed[i] != None and y1 >= 180:
cv2.putText(resultImage, str(int(speed[i])) + " km/hr", (int(x1 + w1/2), int(y1-5)),cv2.FONT_HERSHEY_SIMPLEX, 0.75, (255, 255, 255), 2)
#print ('CarID ' + str(i) + ': speed is ' + str("%.2f" % round(speed[i], 0)) + ' km/h.\n')
#else:
# cv2.putText(resultImage, "Far Object", (int(x1 + w1/2), int(y1)),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 2)
#print ('CarID ' + str(i) + ' Location1: ' + str(carLocation1[i]) + ' Location2: ' + str(carLocation2[i]) + ' speed is ' + str("%.2f" % round(speed[i], 0)) + ' km/h.\n')
cv2.imshow('result', resultImage)
# Write the frame into the file 'output.avi'
#out.write(resultImage)
if cv2.waitKey(33) == 27:
break
cv2.destroyAllWindows()
if __name__ == '__main__':
trackMultipleObjects()