WebRTC学习进阶之路 --- 十四、源码分析之WebRTC中的线程详解-ThreadManager&Thread
WebRTC学习进阶之路系列总目录:https://blog.csdn.net/xiaomucgwlmx/article/details/103204274
前言
WebRTC源码中的很多注释是很赞的,看源码的时候多加阅读注释有助于更好的理解。
WebRTC实现了跨平台(Windows,MacOS,Linux,IOS,Android)的线程类rtc::Thread,WebRTC内部的network_thread,worker_thread,signaling_thread均是该类的实例。
基础功能
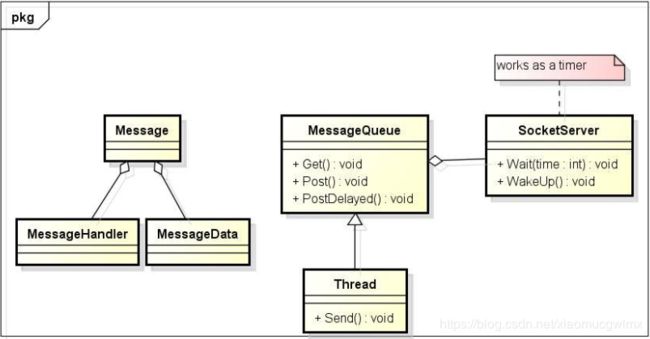
rtc:: Thread及其相关类,ThreadManager、MessageQueue,Runnable等等一起提供了如下的基础功能:
线程的管理:通过ThreadManager单例对象,可以管理所有的Thread实例;
线程的常规基本功能:rtc:: Thread提供创建线程对象,设置线程名称,启动线程去执行用户代码;
消息循环,消息投递:rtc:: Thread通过继承MessageQueue类,提供了内部消息循环,并提供了线程间异步,同步投递消息的功能;
跨线程执行方法:提供了跨线程执行方法,并返回执行结果的功能。该功能非常强大,因为WebRTC在某些功能模块的使用上,有要求其必需在指定的线程中才能调用的基本要求,比如音频模块:ADM 的创建必须要在 WebRTC 的 worker thread 中进行;
多路分离器:通过持有SocketServer对象,实现了多路分离器的功能,能处理网络IO;
signaling_thread:处理小工作量方法,要求此线程内的方法都必须快速返回。
worker_thread:处理大工作量的方法,此线程内的方法可能会处理很长时间。
network_thread:处理网络消息。
下边我们来看下两个线程的核心类:ThreadManager和Thread。
一、ThreadManager
ThreadManager的源码位于rtc_base目录下的thread.h与thread.cc中,相关头文件如下:
class RTC_EXPORT ThreadManager {
public:
static const int kForever = -1;
// Singleton, constructor and destructor are private.
static ThreadManager* Instance();
Thread* CurrentThread();
void SetCurrentThread(Thread* thread);
Thread* WrapCurrentThread();
void UnwrapCurrentThread();
bool IsMainThread();
private:
ThreadManager();
~ThreadManager();
#if defined(WEBRTC_POSIX)
pthread_key_t key_;
#endif
#if defined(WEBRTC_WIN)
const DWORD key_;
#endif
// The thread to potentially autowrap.
const PlatformThreadRef main_thread_ref_;
RTC_DISALLOW_COPY_AND_ASSIGN(ThreadManager);
};我们来逐步看下这几个方法:
1,static ThreadManager* Instance()
ThreadManager* ThreadManager::Instance() {
static ThreadManager* const thread_manager = new ThreadManager();
return thread_manager;
}从源码可以看到ThreadManager是通过单例模式,通过静态方法Instance()来获取唯一的实例。
2,构造与设置、获取当前线程(跨平台)
#if defined(WEBRTC_POSIX)
ThreadManager::ThreadManager() : main_thread_ref_(CurrentThreadRef()) {
#if defined(WEBRTC_MAC)
InitCocoaMultiThreading();
#endif
pthread_key_create(&key_, nullptr);
}
Thread* ThreadManager::CurrentThread() {
return static_cast(pthread_getspecific(key_));
}
void ThreadManager::SetCurrentThread(Thread* thread) {
#if RTC_DLOG_IS_ON
if (CurrentThread() && thread) {
RTC_DLOG(LS_ERROR) << "SetCurrentThread: Overwriting an existing value?";
}
#endif // RTC_DLOG_IS_ON
pthread_setspecific(key_, thread);
}
#endif
#if defined(WEBRTC_WIN)
ThreadManager::ThreadManager()
: key_(TlsAlloc()), main_thread_ref_(CurrentThreadRef()) {}
Thread* ThreadManager::CurrentThread() {
return static_cast(TlsGetValue(key_));
}
void ThreadManager::SetCurrentThread(Thread* thread) {
RTC_DCHECK(!CurrentThread() || !thread);
TlsSetValue(key_, thread);
}
#endif 构造与析构函数均声明为private。下边看下ThreadManager在不同平台上的构造方式、设置和获取当前线程的系统差异性:
下边是来自网友ice_ly000的一段精辟的阐述,摘录部分如下:我们可以看到在Windows和类Unix系统中实现进行了区分,WEBRTC_POSIX宏表征该系统是类Unix系统,而WEBRTC_WIN宏表征是Windows系统。虽然实现稍微有些许不同,在MAC下还需要调用InitCocoaMultiThreading()方法来初始化多线程库。但是两个构造函数均初始化了成员key_与main_thread_ref_(我们可以看到WebRTC中的私有成员均以下划线结尾)。其中key是线程管理的关键。
key_的初始化:在Windows平台上,key_被声明为DWORD类型,赋值为TlsAlloc()函数的返回值,TlsAlloc()函数是Windows的系统API,Tls表示的是线程局部存储Thread Local Storage的缩写,其为每个可能的线程分配了一个线程局部变量的槽位,该槽位用来存储WebRTC的Thread线程对象指针。如果不了解相关概念,可以看微软的官方文档。在类Unix系统上,key_被声明pthread_key_t类型,使用方法pthread_key_create(&key_, nullptr);赋值。实质是类Unix系统上的线程局部存储实现,隶属于线程库pthread,因此方法与变量均以pthread开头。总之,在ThreadManager的构造之初,WebRTC就为各个线程所对应的Thread对象制造了一个线程局部变量的槽位,成为多线程管理的关键。
main_thread_ref_的初始化:该成员为PlatformThreadRef类型的对象,赋值为CurrentThreadRef()方法的返回值,如源码所示:在Windows系统下,取值为WinAPI GetCurrentThreadId()返回的当前线程描述符,DWORD类型;在FUCHSIA系统下(该系统是Google新开发的操作系统,像Android还是基于Linux内核属于类Unix范畴,遵循POSIX规范,但FUCHSIA是基于新内核zircon开发的),返回zx_thread_self(),zx_handle_t类型;在类Unix系统下,通过pthread库的pthread_self()返回,pthread_t类型。总之,如前文所述,这部分代码肯定是在主线程中所运行,因此,main_thread_ref_存储了主线程TID在不同平台下的不同表示。
感谢ice_ly000!
3,WrapCurrentThread()与UnwrapCurrentThread()
// Returns a thread object with its thread_ ivar set
// to whatever the OS uses to represent the thread.
// If there already *is* a Thread object corresponding to this thread,
// this method will return that. Otherwise it creates a new Thread
// object whose wrapped() method will return true, and whose
// handle will, on Win32, be opened with only synchronization privileges -
// if you need more privilegs, rather than changing this method, please
// write additional code to adjust the privileges, or call a different
// factory method of your own devising, because this one gets used in
// unexpected contexts (like inside browser plugins) and it would be a
// shame to break it. It is also conceivable on Win32 that we won't even
// be able to get synchronization privileges, in which case the result
// will have a null handle.
Thread* WrapCurrentThread();
void UnwrapCurrentThread();Thread* ThreadManager::WrapCurrentThread() {
Thread* result = CurrentThread();
if (nullptr == result) {
result = new Thread(SocketServer::CreateDefault());
result->WrapCurrentWithThreadManager(this, true);
}
return result;
}
void ThreadManager::UnwrapCurrentThread() {
Thread* t = CurrentThread();
if (t && !(t->IsOwned())) {
t->UnwrapCurrent();
delete t;
}
}上边头文件中的注释已经介绍的很清楚了,每个操作系统都会返回一个thread对象,已经存在thread对象就直接返回,否则创建一个新的thread对象,并通过该对象的WrapCurrentWithThreadManager()方法将新建的thread对象纳入ThreadManager的管理之中。对于UnwrapCurrentThread,会根据该线程是不是WrapCurrentWithThreadManager而来,决定是否进行正真的UnwrapCurrent操作删除Thread对象。
4,是否为主线程IsMainThread()
bool ThreadManager::IsMainThread() {
return IsThreadRefEqual(CurrentThreadRef(), main_thread_ref_);
}
二、Thread
1,源码头文件
源码中的注释已经非常全,这里将.h及注释展示如下:
class RTC_LOCKABLE RTC_EXPORT Thread : public MessageQueue,
public webrtc::TaskQueueBase {
public:
explicit Thread(SocketServer* ss);
explicit Thread(std::unique_ptr ss);
// Constructors meant for subclasses; they should call DoInit themselves and
// pass false for |do_init|, so that DoInit is called only on the fully
// instantiated class, which avoids a vptr data race.
Thread(SocketServer* ss, bool do_init);
Thread(std::unique_ptr ss, bool do_init);
// NOTE: ALL SUBCLASSES OF Thread MUST CALL Stop() IN THEIR DESTRUCTORS (or
// guarantee Stop() is explicitly called before the subclass is destroyed).
// This is required to avoid a data race between the destructor modifying the
// vtable, and the Thread::PreRun calling the virtual method Run().
~Thread() override;
static std::unique_ptr CreateWithSocketServer();
static std::unique_ptr Create();
static Thread* Current();
// Used to catch performance regressions. Use this to disallow blocking calls
// (Invoke) for a given scope. If a synchronous call is made while this is in
// effect, an assert will be triggered.
// Note that this is a single threaded class.
class ScopedDisallowBlockingCalls {
public:
ScopedDisallowBlockingCalls();
ScopedDisallowBlockingCalls(const ScopedDisallowBlockingCalls&) = delete;
ScopedDisallowBlockingCalls& operator=(const ScopedDisallowBlockingCalls&) =
delete;
~ScopedDisallowBlockingCalls();
private:
Thread* const thread_;
const bool previous_state_;
};
bool IsCurrent() const;
// Sleeps the calling thread for the specified number of milliseconds, during
// which time no processing is performed. Returns false if sleeping was
// interrupted by a signal (POSIX only).
static bool SleepMs(int millis);
// Sets the thread's name, for debugging. Must be called before Start().
// If |obj| is non-null, its value is appended to |name|.
const std::string& name() const { return name_; }
bool SetName(const std::string& name, const void* obj);
// Starts the execution of the thread.
bool Start();
// Tells the thread to stop and waits until it is joined.
// Never call Stop on the current thread. Instead use the inherited Quit
// function which will exit the base MessageQueue without terminating the
// underlying OS thread.
virtual void Stop();
// By default, Thread::Run() calls ProcessMessages(kForever). To do other
// work, override Run(). To receive and dispatch messages, call
// ProcessMessages occasionally.
virtual void Run();
virtual void Send(const Location& posted_from,
MessageHandler* phandler,
uint32_t id = 0,
MessageData* pdata = nullptr);
// Convenience method to invoke a functor on another thread. Caller must
// provide the |ReturnT| template argument, which cannot (easily) be deduced.
// Uses Send() internally, which blocks the current thread until execution
// is complete.
// Ex: bool result = thread.Invoke(RTC_FROM_HERE,
// &MyFunctionReturningBool);
// NOTE: This function can only be called when synchronous calls are allowed.
// See ScopedDisallowBlockingCalls for details.
// NOTE: Blocking invokes are DISCOURAGED, consider if what you're doing can
// be achieved with PostTask() and callbacks instead.
template
ReturnT Invoke(const Location& posted_from, FunctorT&& functor) {
FunctorMessageHandler handler(
std::forward(functor));
InvokeInternal(posted_from, &handler);
return handler.MoveResult();
}
// Posts a task to invoke the functor on |this| thread asynchronously, i.e.
// without blocking the thread that invoked PostTask(). Ownership of |functor|
// is passed and (usually, see below) destroyed on |this| thread after it is
// invoked.
// Requirements of FunctorT:
// - FunctorT is movable.
// - FunctorT implements "T operator()()" or "T operator()() const" for some T
// (if T is not void, the return value is discarded on |this| thread).
// - FunctorT has a public destructor that can be invoked from |this| thread
// after operation() has been invoked.
// - The functor must not cause the thread to quit before PostTask() is done.
//
// Destruction of the functor/task mimics what TaskQueue::PostTask does: If
// the task is run, it will be destroyed on |this| thread. However, if there
// are pending tasks by the time the Thread is destroyed, or a task is posted
// to a thread that is quitting, the task is destroyed immediately, on the
// calling thread. Destroying the Thread only blocks for any currently running
// task to complete. Note that TQ abstraction is even vaguer on how
// destruction happens in these cases, allowing destruction to happen
// asynchronously at a later time and on some arbitrary thread. So to ease
// migration, don't depend on Thread::PostTask destroying un-run tasks
// immediately.
//
// Example - Calling a class method:
// class Foo {
// public:
// void DoTheThing();
// };
// Foo foo;
// thread->PostTask(RTC_FROM_HERE, Bind(&Foo::DoTheThing, &foo));
//
// Example - Calling a lambda function:
// thread->PostTask(RTC_FROM_HERE,
// [&x, &y] { x.TrackComputations(y.Compute()); });
template
void PostTask(const Location& posted_from, FunctorT&& functor) {
// Allocate at first call, never deallocate.
static auto* const handler =
new rtc_thread_internal::MessageHandlerWithTask;
Post(posted_from, handler, 0,
new rtc_thread_internal::MessageWithFunctor(
std::forward(functor)));
}
// From TaskQueueBase
void PostTask(std::unique_ptr task) override;
void PostDelayedTask(std::unique_ptr task,
uint32_t milliseconds) override;
void Delete() override;
// From MessageQueue
bool IsProcessingMessagesForTesting() override;
void Clear(MessageHandler* phandler,
uint32_t id = MQID_ANY,
MessageList* removed = nullptr) override;
void ReceiveSends() override;
// ProcessMessages will process I/O and dispatch messages until:
// 1) cms milliseconds have elapsed (returns true)
// 2) Stop() is called (returns false)
bool ProcessMessages(int cms);
// Returns true if this is a thread that we created using the standard
// constructor, false if it was created by a call to
// ThreadManager::WrapCurrentThread(). The main thread of an application
// is generally not owned, since the OS representation of the thread
// obviously exists before we can get to it.
// You cannot call Start on non-owned threads.
bool IsOwned();
// Expose private method IsRunning() for tests.
//
// DANGER: this is a terrible public API. Most callers that might want to
// call this likely do not have enough control/knowledge of the Thread in
// question to guarantee that the returned value remains true for the duration
// of whatever code is conditionally executing because of the return value!
bool RunningForTest() { return IsRunning(); }
// These functions are public to avoid injecting test hooks. Don't call them
// outside of tests.
// This method should be called when thread is created using non standard
// method, like derived implementation of rtc::Thread and it can not be
// started by calling Start(). This will set started flag to true and
// owned to false. This must be called from the current thread.
bool WrapCurrent();
void UnwrapCurrent();
// Sets the per-thread allow-blocking-calls flag to false; this is
// irrevocable. Must be called on this thread.
void DisallowBlockingCalls() { SetAllowBlockingCalls(false); }
#ifdef WEBRTC_ANDROID
// Sets the per-thread allow-blocking-calls flag to true, sidestepping the
// invariants upheld by DisallowBlockingCalls() and
// ScopedDisallowBlockingCalls. Must be called on this thread.
void DEPRECATED_AllowBlockingCalls() { SetAllowBlockingCalls(true); }
#endif
protected:
// Same as WrapCurrent except that it never fails as it does not try to
// acquire the synchronization access of the thread. The caller should never
// call Stop() or Join() on this thread.
void SafeWrapCurrent();
// Blocks the calling thread until this thread has terminated.
void Join();
static void AssertBlockingIsAllowedOnCurrentThread();
friend class ScopedDisallowBlockingCalls;
private:
class QueuedTaskHandler final : public MessageHandler {
public:
void OnMessage(Message* msg) override;
};
// Sets the per-thread allow-blocking-calls flag and returns the previous
// value. Must be called on this thread.
bool SetAllowBlockingCalls(bool allow);
#if defined(WEBRTC_WIN)
static DWORD WINAPI PreRun(LPVOID context);
#else
static void* PreRun(void* pv);
#endif
// ThreadManager calls this instead WrapCurrent() because
// ThreadManager::Instance() cannot be used while ThreadManager is
// being created.
// The method tries to get synchronization rights of the thread on Windows if
// |need_synchronize_access| is true.
bool WrapCurrentWithThreadManager(ThreadManager* thread_manager,
bool need_synchronize_access);
// Return true if the thread is currently running.
bool IsRunning();
// Processes received "Send" requests. If |source| is not null, only requests
// from |source| are processed, otherwise, all requests are processed.
void ReceiveSendsFromThread(const Thread* source);
// If |source| is not null, pops the first "Send" message from |source| in
// |sendlist_|, otherwise, pops the first "Send" message of |sendlist_|.
// The caller must lock |crit_| before calling.
// Returns true if there is such a message.
bool PopSendMessageFromThread(const Thread* source, _SendMessage* msg);
void InvokeInternal(const Location& posted_from, MessageHandler* handler);
std::list<_SendMessage> sendlist_;
std::string name_;
// TODO(tommi): Add thread checks for proper use of control methods.
// Ideally we should be able to just use PlatformThread.
#if defined(WEBRTC_POSIX)
pthread_t thread_ = 0;
#endif
#if defined(WEBRTC_WIN)
HANDLE thread_ = nullptr;
DWORD thread_id_ = 0;
#endif
// Indicates whether or not ownership of the worker thread lies with
// this instance or not. (i.e. owned_ == !wrapped).
// Must only be modified when the worker thread is not running.
bool owned_ = true;
// Only touched from the worker thread itself.
bool blocking_calls_allowed_ = true;
// Runs webrtc::QueuedTask posted to the Thread.
QueuedTaskHandler queued_task_handler_;
friend class ThreadManager;
RTC_DISALLOW_COPY_AND_ASSIGN(Thread);
}; 2,Thread的构造
explicit Thread(SocketServer* ss);
explicit Thread(std::unique_ptr ss);
// Constructors meant for subclasses; they should call DoInit themselves and
// pass false for |do_init|, so that DoInit is called only on the fully
// instantiated class, which avoids a vptr data race.
Thread(SocketServer* ss, bool do_init);
Thread(std::unique_ptr ss, bool do_init); Thread::Thread(SocketServer* ss) : Thread(ss, /*do_init=*/true) {}
Thread::Thread(std::unique_ptr ss)
: Thread(std::move(ss), /*do_init=*/true) {}
Thread::Thread(SocketServer* ss, bool do_init)
: MessageQueue(ss, /*do_init=*/false) {
SetName("Thread", this); // default name
if (do_init) {
DoInit();
}
}
Thread::Thread(std::unique_ptr ss, bool do_init)
: MessageQueue(std::move(ss), false) {
SetName("Thread", this); // default name
if (do_init) {
DoInit();
}
} void MessageQueue::DoInit() {
if (fInitialized_) {
return;
}
fInitialized_ = true;
MessageQueueManager::Add(this);
}我们可以看到有四个构造,前边两个声明为explicit,C++提供了关键字explicit,可以阻止不应该允许的经过转换构造函数进行的隐式转换的发生。声明为explicit的构造函数不能在隐式转换中使用。而头文件中对没有explicit修饰的两个已经做了解释,用于子类的构造函数, 它们应该自己调用DoInit并为| do_init |传递false,以便仅在完全实例化的类上调用DoInit,这避免了vptr数据争用。
DoInit()方法在Thread构造中调用,我们会发现该方法将MQ的初始化标志置为true,并且将自身纳入MQ管理类的管理列表中。如果DoInit在MQ构造中调用,意味着MQ构造后,Thread对象的指针已经暴露于外(被MQ管理类对象持有),此时Thread对象并未完全构建完成,其虚表vtable还未完全建立。这势必会导致Thread的对象还未构造完成时,就可能会被外部使用(在别的线程中通过MessageQueueManager访问该对象)的风险。为了规避这样的竞太条件,因此,需要给MQ的构造传入false,并在Thread构造中调用DoInit()。
client中的应用如下:
rtc::WinsockInitializer winsock_init;
rtc::Win32SocketServer w32_ss;
rtc::Win32Thread w32_thread(&w32_ss);
rtc::ThreadManager::Instance()->SetCurrentThread(&w32_thread);3,创建Thread
std::unique_ptr Thread::CreateWithSocketServer() {
return std::unique_ptr(new Thread(SocketServer::CreateDefault()));
}
std::unique_ptr Thread::Create() {
return std::unique_ptr(
new Thread(std::unique_ptr(new NullSocketServer())));
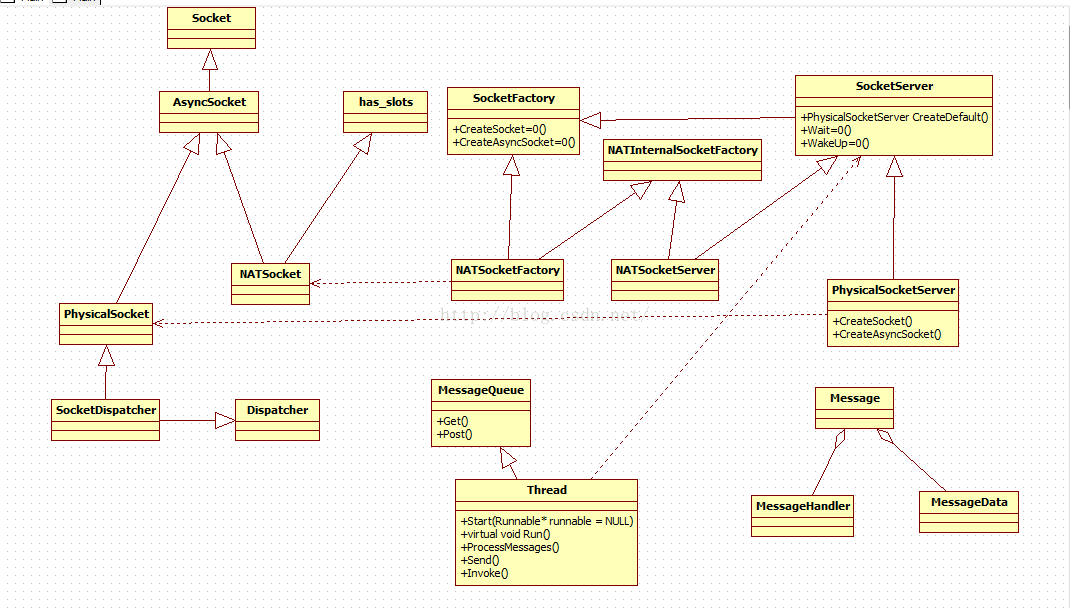
} class NullSocketServer : public SocketServer {
public:
NullSocketServer();
~NullSocketServer() override;
bool Wait(int cms, bool process_io) override;
void WakeUp() override;
Socket* CreateSocket(int family, int type) override;
AsyncSocket* CreateAsyncSocket(int family, int type) override;
private:
Event event_;
};- Thread::Create():给Thread构造传入的是NullSocketServer对象,该对象不持有真正的Socket,使得创建的Thread无法处理网络IO,但可以运行消息循环,可以处理线程间消息投递。WebRTC中工作线程worker_thread_默认使用该方法创建;
- Thread::CreateWithSocketServer():给Thread构造传入PhysicalSocketServer对象,该对象持有平台相关的Socket对象,使得Thread能处理网络IO,当然,也可以处理线程间消息投递。WebRTC中网络线程network_thread_默认使用该方法创建。
4,线程启动
bool Thread::Start() {
RTC_DCHECK(!IsRunning());
if (IsRunning())
return false;
Restart(); // reset IsQuitting() if the thread is being restarted
// Make sure that ThreadManager is created on the main thread before
// we start a new thread.
ThreadManager::Instance();
owned_ = true;
#if defined(WEBRTC_WIN)
thread_ = CreateThread(nullptr, 0, PreRun, this, 0, &thread_id_);
if (!thread_) {
return false;
}
#elif defined(WEBRTC_POSIX)
pthread_attr_t attr;
pthread_attr_init(&attr);
int error_code = pthread_create(&thread_, &attr, PreRun, this);
if (0 != error_code) {
RTC_LOG(LS_ERROR) << "Unable to create pthread, error " << error_code;
thread_ = 0;
return false;
}
RTC_DCHECK(thread_);
#endif
return true;
}这块很简单,首先检测运行状态,复位消息循环stop_标志位,快平台创建线程对象。重点在PreRun():
// static
#if defined(WEBRTC_WIN)
DWORD WINAPI Thread::PreRun(LPVOID pv) {
#else
void* Thread::PreRun(void* pv) {
#endif
Thread* thread = static_cast(pv);
// 将新创建的Thread对象纳入管理,与当前线程进行绑定。
ThreadManager::Instance()->SetCurrentThread(thread);
// 为线程设置名称,该方法会调用平台相关的API给线程内核结构体赋值上该线程的名称。
rtc::SetCurrentThreadName(thread->name_.c_str());
CurrentTaskQueueSetter set_current_task_queue(thread);
// 如果是MAC系统,通过pool对象的创建和析构来使用oc的自动释放池技术,进行内存回收。
#if defined(WEBRTC_MAC)
ScopedAutoReleasePool pool;
#endif
thread->Run();//阻塞循环,下边再详解
//到这里意味着线程要释放了
ThreadManager::Instance()->SetCurrentThread(nullptr);
#ifdef WEBRTC_WIN
return 0;
#else
return nullptr;
#endif
} // namespace rtc 详细的介绍已经写在了主时中,下边我们来看一下Run()方法。
5,Run() 之ProcessMessages()建立消息循环
void Thread::Run() {
ProcessMessages(kForever);
}
bool Thread::ProcessMessages(int cmsLoop) {
// Using ProcessMessages with a custom clock for testing and a time greater
// than 0 doesn't work, since it's not guaranteed to advance the custom
// clock's time, and may get stuck in an infinite loop.
RTC_DCHECK(GetClockForTesting() == nullptr || cmsLoop == 0 ||
cmsLoop == kForever);
// 计算终止处理消息的时间
int64_t msEnd = (kForever == cmsLoop) ? 0 : TimeAfter(cmsLoop);
// 下次可以进行消息获取的时间长度
int cmsNext = cmsLoop;
while (true) {
#if defined(WEBRTC_MAC)
ScopedAutoReleasePool pool;
#endif
Message msg;
if (!Get(&msg, cmsNext))
return !IsQuitting();
Dispatch(&msg);
// 若不是无限期,计算下次可以进行消息获取的时间
if (cmsLoop != kForever) {
cmsNext = static_cast(TimeUntil(msEnd));
// 若使用时间已经到了,那么退出循环
if (cmsNext < 0)
return true;
}
}
} ProcessMessages当传入参数为kForever(static const int kForever = -1;)时消息循环无限期进行循环处理,否则有限期定时处理,while中一直会调用MessageQueue::Get()去获取消息(MessageQueue、MessageQueueManager等会在后续核心分析),通过Dispatch(&msg);来处理消息。
六、Invoke跨线程同步执行
// Convenience method to invoke a functor on another thread. Caller must
// provide the |ReturnT| template argument, which cannot (easily) be deduced.
// Uses Send() internally, which blocks the current thread until execution
// is complete.
// Ex: bool result = thread.Invoke(RTC_FROM_HERE,
// &MyFunctionReturningBool);
// NOTE: This function can only be called when synchronous calls are allowed.
// See ScopedDisallowBlockingCalls for details.
// NOTE: Blocking invokes are DISCOURAGED, consider if what you're doing can
// be achieved with PostTask() and callbacks instead.
template
ReturnT Invoke(const Location& posted_from, FunctorT&& functor) {
FunctorMessageHandler handler(
std::forward(functor));
InvokeInternal(posted_from, &handler);
return handler.MoveResult();
}
void Thread::InvokeInternal(const Location& posted_from,
MessageHandler* handler) {
TRACE_EVENT2("webrtc", "Thread::Invoke", "src_file_and_line",
posted_from.file_and_line(), "src_func",
posted_from.function_name());
Send(posted_from, handler);
} Invoke提供在另一个线程上调用函数的便捷方法。原理是内部使用Send(),它将阻塞当前线程,直到执行完成。这里要注意两点:
- 仅当允许同步调用时才能调用此函数。
- 建议不要使用阻塞调用,请考虑是否可以使用PostTask()和回调来实现您正在执行的操作。
下边我们看下阻塞执行的send()方法。
七、阻塞执行的send()发送消息
void Thread::Send(const Location& posted_from,
MessageHandler* phandler,
uint32_t id,
MessageData* pdata) {
if (IsQuitting())
return;
// Sent messages are sent to the MessageHandler directly, in the context
// of "thread", like Win32 SendMessage. If in the right context,
// call the handler directly.
Message msg;
msg.posted_from = posted_from;
msg.phandler = phandler;
msg.message_id = id;
msg.pdata = pdata;
if (IsCurrent()) {
phandler->OnMessage(&msg);
return;
}
AssertBlockingIsAllowedOnCurrentThread();
AutoThread thread;
Thread* current_thread = Thread::Current();
RTC_DCHECK(current_thread != nullptr); // AutoThread ensures this
bool ready = false;
{
CritScope cs(&crit_);
_SendMessage smsg;
smsg.thread = current_thread;
smsg.msg = msg;
smsg.ready = &ready;
sendlist_.push_back(smsg);
}
// Wait for a reply
WakeUpSocketServer();
bool waited = false;
crit_.Enter();
while (!ready) {
crit_.Leave();
// We need to limit "ReceiveSends" to |this| thread to avoid an arbitrary
// thread invoking calls on the current thread.
current_thread->ReceiveSendsFromThread(this);
current_thread->socketserver()->Wait(kForever, false);
waited = true;
crit_.Enter();
}
crit_.Leave();
// Our Wait loop above may have consumed some WakeUp events for this
// MessageQueue, that weren't relevant to this Send. Losing these WakeUps can
// cause problems for some SocketServers.
//
// Concrete example:
// Win32SocketServer on thread A calls Send on thread B. While processing the
// message, thread B Posts a message to A. We consume the wakeup for that
// Post while waiting for the Send to complete, which means that when we exit
// this loop, we need to issue another WakeUp, or else the Posted message
// won't be processed in a timely manner.
if (waited) {
current_thread->socketserver()->WakeUp();
}
}- IsQuitting()判断目标线程的消息循环是否还在处理消息,若消息循环停止工作,那么会拒绝处理消息,Send会直接返回创建需要处理的消息
- 判断IsCurrent()若目标线程就是自己,那么直接处理消息phandler->OnMessage(&msg),然后返回
- AssertBlockingIsAllowedOnCurrentThread();断言当前线程是否具有阻塞权限,无阻塞权限向别的线程Send消息就是个非法操作
- RTC_DCHECK(current_thread != nullptr);确保当前线程有一个Thread对象与之绑定
- ready 表征该消息是否已经处理完
- 创建一个SendMessage对象,放置到目标线程对象的sendlist_ ,sendlist_.push_back(smsg);
- WakeUpSocketServer();将目标线程从IO处理中唤醒
- 同步等待消息被处理
- current_thread->ReceiveSendsFromThread(this);处理对方发送的消息
- current_thread->socketserver()->Wait(kForever, false);处理完对方的Send消息后,阻塞等待对方处理完我Send的消息
- 如果出现过waited,那么再唤醒一次当前线程去处理Post消息
参考链接:https://blog.csdn.net/ice_ly000/article/details/103178691
WebRTC学习进阶之路系列总目录:https://blog.csdn.net/xiaomucgwlmx/article/details/103204274