坐标转换(c#)
坐标转换
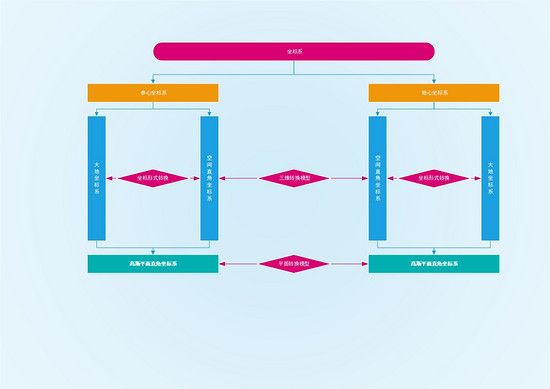
坐标转换,简言之就是讲一个坐标系的坐标通过特定模型转换到另一坐标下;转换中,需要用到不同的转换模型,例如三维空间下的布尔莎七参数、莫洛金斯模型;二维空间下的平面三参、四参、多项式拟合等模型。本文中,主要使用布尔莎七参数模型进行坐标转换。
坐标转换关系
布尔莎模型(七参数模型)
详细见百科: https://baike.baidu.com/item/%E4%B8%83%E5%8F%82%E6%95%B0
程序实现
1.编写数据转换类
把各种格式表示的度分秒转换为弧度形式进行计算,最后一个方法把弧度转为度分秒连写的格式。
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Text.RegularExpressions;
namespace CoordTF
{
class DataCnversion
{
#region
///
/// 数据格式化,全转为度分秒(x.xxxx)连写格式
///
/// 大地坐标
/// 数据格式
///
/// 度°分'秒"格式转弧度
///
/// 格式为XX ° XX ' XX.XX "
///
/// 度:分:秒 格式转弧度
///
/// 格式为度:分:秒
///
/// 度分秒连写(x.xxxx)转弧度
///
/// 格式为x.xxxx
///
/// xx.xxxx° 格式转弧度
///
/// 角度,格式为XX.XXXX°
///
/// 弧度转角度(结果为xx.xxxxxx连写格式)
///
/// 弧度值
///
2.编写坐标转换类
包含空间与大地互转、高斯正反算、同一坐标系下换带计算、布尔莎七参数转换计算。
如果有想学习编程的初学者,可来我们的C/C++技术学习扣qun的哦:前面是58,93后面是4,83-89里面免费送整套系统的C/C++教程!
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using System.Windows.Forms;
using MathNet.Numerics.LinearAlgebra.Double;
namespace CoordTF
{
class CoordTransform
{
///
/// 大地坐标转空间直角
///
/// 纬度
/// 经度
/// 高度
/// 椭球长半轴
/// 扁率倒数
///
/// 空间直角转大地坐标
///
/// 空间X
/// 空间Y
/// 空间Z
/// 椭球长半轴
/// 扁率倒数
///
/// 布尔莎七参转换
///
/// 空间直角X
/// 空间直角Y
/// 空间直角Z
/// 平移参数x
/// 平移参数y
/// 平移参数z
/// 旋转参数x
/// 旋转参数y
/// 旋转参数z
/// 尺度参数k
///
/// 高斯正算
///
/// 大地纬度
/// 大地经度
/// 中央子午线经度(度°分′秒″格式)
/// 椭球长半径
/// 扁率倒数
/// x常参
/// y常参
///
/// 高斯反算
///
/// 平面坐标x
/// 平面坐标y
/// 中央子午线经度
/// 椭球长半轴
/// 扁率倒数
/// x常参数
/// y常参数
///
/// 同一坐标系下坐标换带
///
///
///
/// 换带前经度
/// 换带后经度
///
///
///
///
///
到此,所有的基础转换类完成,使用时依据坐标转换关系,依次调用类中的方法即可。