决策树算法--CART分类树算法
ID3和C4.5算法,生成的决策树是多叉树,只能处理分类不能处理回归。而CART(classification and regression tree)分类回归树算法,既可用于分类也可用于回归。 分类树的输出是样本的类别, 回归树的输出是一个实数。
CART算法步骤
- 特征选择;
- 递归建立决策树;
- 决策树剪枝;
CART分类树算法
ID3中使用了信息增益选择特征,增益大优先选择。C4.5中,采用信息增益率选择特征,减少因特征值多导致信息增益大的问题。CART分类树算法使用基尼系数选择特征,基尼系数代表了模型的不纯度,基尼系数越小,不纯度越低,特征越好。这和信息增益(率)相反。
基尼系数
数据集D的纯度可用基尼值来度量
G i n i ( D ) = ∑ i = 1 n p ( x i ) ∗ ( 1 − p ( x i ) ) = 1 − ∑ i = 1 n p ( x i ) 2 \begin{aligned}Gini(D)&=\sum_{i=1}^{n}{p(x_i)*(1-p(x_i))}\\ &=1-\sum_{i=1}^{n}{{p(x_i)}^2}\end{aligned} Gini(D)=i=1∑np(xi)∗(1−p(xi))=1−i=1∑np(xi)2
其中, p ( x i ) p(x_i) p(xi)是分类 x i x_i xi出现的概率,n是分类的数目。Gini(D)反映了从数据集D中随机抽取两个样本,其类别标记不一致的概率。因此,Gini(D)越小,则数据集D的纯度越高。
对于样本D,个数为|D|,根据特征A 是否取某一可能值a,把样本D分成两部分 D 1 和 D 2 D_1和D_2 D1和D2 。所以CART分类树算法建立起来的是二叉树,而不是多叉树。
D 1 = { ( x , y ) ∈ D ∣ A ( x ) = a } , D 2 = D − D 1 D_1= {\{(x,y)∈D|A(x)=a\}},D_2=D−D_1 D1={(x,y)∈D∣A(x)=a},D2=D−D1
在属性A的条件下,样本D的基尼系数定义为
G i n i I n d e x ( D ∣ A = a ) = ∣ D 1 ∣ ∣ D ∣ G i n i ( D 1 ) + ∣ D 2 ∣ ∣ D ∣ G i n i ( D 2 ) GiniIndex(D|A=a)=\frac{|D_1|}{|D|}Gini(D_1)+\frac{|D_2|}{|D|}Gini(D_2) GiniIndex(D∣A=a)=∣D∣∣D1∣Gini(D1)+∣D∣∣D2∣Gini(D2)
对连续特征和离散特征的处理
连续特征
与C4.5思想相同,都是将连续的特征离散化。区别在选择划分点时,C4.5是信息增益率,CART是基尼系数。
具体思路:
- m个样本的连续特征A有m个值,从小到大排列 a 1 , a 2 , . . . , a m a_1,a_2,...,a_m a1,a2,...,am,则CART取相邻两样本值的平均数做划分点,一共有m-1个,其中第i个划分点Ti表示为: T i = ( a i + a i + 1 ) / 2 T_i=(a_i+a_{i+1})/2 Ti=(ai+ai+1)/2。
- 分别计算以这m-1个点作为二元分类点时的基尼系数。选择基尼系数最小的点为该连续特征的二元离散分类点。比如取到的基尼系数最小的点为 a t a_t at,则小于 a t a_t at的值为类别1,大于 a t a_t at的值为类别2,这样就做到了连续特征的离散化。
注意的是,与ID3、C4.5处理离散属性不同的是,如果当前节点为连续属性,则该属性在后面还可以参与子节点的产生选择过程。
离散特征
思路:不停的二分离散特征。
在ID3、C4.5,特征A被选取建立决策树节点,如果它有3个类别A1,A2,A3,我们会在决策树上建立一个三叉点,这样决策树是多叉树,而且离散特征只会参与一次节点的建立。
CART采用的是不停的二分,且一个特征可能会参与多次节点的建立。CART会考虑把特征A分成 { A 1 } \{A_1\} {A1}和 { A 2 , A 3 } 、 { A 2 } 和 { A 1 , A 3 } 、 { A 3 } 和 { A 1 , A 2 } \{A_2,A_3\}、\{A_2\}和\{A_1,A_3\}、\{A_3\}和\{A_1,A_2\} {A2,A3}、{A2}和{A1,A3}、{A3}和{A1,A2}三种情况,找到基尼系数最小的组合,比如 { A 2 } \{A_2\} {A2}和 { A 1 , A 3 } \{A_1,A_3\} {A1,A3},然后建立二叉树节点,一个节点是 A 2 A_2 A2对应的样本,另一个节点是对 { A 1 , A 3 } \{A_1,A_3\} {A1,A3}对应的样本。由于这次没有把特征A的取值完全分开,后面还有机会对子节点继续选择特征A划分 A 1 A_1 A1和 A 3 A_3 A3。
例子
数据集的属性有3个,分别是有房情况,婚姻状况和年收入,其中有房情况和婚姻状况是离散的取值,而年收入是连续的取值。拖欠贷款者属于分类的结果。

对于有房情况这个属性,它是离散型数据,那么按照它划分后的Gini系数计算如下

对于婚姻状况属性,它也是离散型数据,它的取值有3种,按照每种属性值分裂后Gini系数计算如下

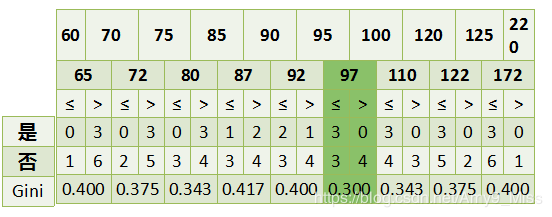
年收入属性,它的取值是连续的,那么连续的取值采用分裂点进行分裂。如下
根据这样的分裂规则CART算法就能完成建树过程 。
建立CART分类树步骤
输入:训练集D,基尼系数的阈值,切分的最少样本个数阈值
输出:分类树T
算法从根节点开始,用训练集递归建立CART分类树。
- 对于当前节点的数据集为D,如果样本个数小于阈值或没有特征,则返回决策子树,当前节点停止递归;
- 计算样本集D的基尼系数,如果基尼系数小于阈值,则返回决策树子树,当前节点停止递归 ;
- 计算当前节点现有各个特征的各个值的基尼指数,
- 在计算出来的各个特征的各个值的基尼系数中,选择基尼系数最小的特征A及其对应的取值a作为最优特征和最优切分点。 然后根据最优特征和最优切分点,将本节点的数据集划分成两部分 D 1 D_1 D1和 D 2 D_2 D2,同时生成当前节点的两个子节点,左节点的数据集为 D 1 D_1 D1,右节点的数据集为 D 2 D_2 D2。
- 对左右的子节点递归调用1-4步,生成CART分类树;
对生成的CART分类树做预测时,假如测试集里的样本落到了某个叶子节点,而该节点里有多个训练样本。则该测试样本的类别为这个叶子节点里概率最大的类别。
剪枝
当分类回归树划分得太细时,会对噪声数据产生过拟合,因此要通过剪枝来解决。剪枝又分为前剪枝和后剪枝,前剪枝是指在构造树的过程中就知道哪些节点可以剪掉 。 后剪枝是指构造出完整的决策树之后再来考查哪些子树可以剪掉。
在分类回归树中可以使用的后剪枝方法有多种,比如:代价复杂性剪枝、最小误差剪枝、悲观误差剪枝等等。这里只介绍代价复杂性剪枝法。
对于分类回归树中的每一个非叶子节点计算它的表面误差率增益值α
α = C ( t ) − C ( T t ) ∣ T t ∣ − 1 \alpha = \frac{C(t)-C(T_t)}{|T_t|-1} α=∣Tt∣−1C(t)−C(Tt)
∣ T t ∣ |T_t| ∣Tt∣:子树中包含的叶子节点个数
C(t):以t为单节点树的误差代价,该节点被剪枝
C ( t ) = r ( t ) ∗ p ( t ) C(t)=r(t)*p(t) C(t)=r(t)∗p(t)
r(t):节点t的误差率
p(t):节点t上的数据占所有户数的比例
C ( T t ) C(T_t) C(Tt)是以t为根节点的子树 T t T_t Tt的误差代价,如果该节点不被剪枝, 它等于子树 T t T_t Tt上所有叶子节点的误差代价之和。
比如有个非叶子节点T4如图所示:
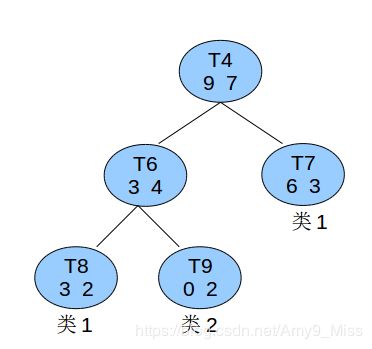
已知所有的数据总共有60条,则节点T4的节点误差代价为:
C ( t ) = r ( t ) ∗ p ( t ) = 7 16 ∗ 16 60 = 7 60 C(t)=r(t)*p(t)=\frac{7}{16}*\frac{16}{60}=\frac{7}{60} C(t)=r(t)∗p(t)=167∗6016=607
子树误差代价为:
C ( T t ) = ∑ C ( i ) = 2 5 ∗ 5 60 + 0 2 ∗ 2 60 + 3 9 ∗ 9 60 = 5 60 C(T_t)=\sum{C(i)}=\frac{2}{5}*\frac{5}{60}+\frac{0}{2}*\frac{2}{60}+\frac{3}{9}*\frac{9}{60}=\frac{5}{60} C(Tt)=∑C(i)=52∗605+20∗602+93∗609=605
以T4为根节点的子树上叶子节点有3个,则
α = 7 / 60 − 5 / 60 3 − 1 = 1 60 \alpha=\frac{7/60-5/60}{3-1}=\frac{1}{60} α=3−17/60−5/60=601
找到 α α α值最小的非叶子节点,令其左、右子节点为NULL。当多个非叶子节点的α值同时达到最小时,取 ∣ T t ∣ |T_t| ∣Tt∣最大的进行剪枝。
总结
| 算法 | 树结构 | 支持模型 | 特征选择 | 连续值处理 | 缺失值处理 | 剪枝 |
|---|---|---|---|---|---|---|
| ID3 | 多叉树 | 分类 | 信息增益 | 不支持 | 不支持 | 不支持 |
| C4.5 | 多叉树 | 分类 | 信息增益率 | 支持 | 支持 | 支持 |
| CART | 二叉树 | 分类、回归 | 基尼系数、平方误差和 | 支持 | 支持 | 支持 |
相关链接
书籍:《机器学习实战》、周志华的西瓜书《机器学习》
例子参考链接
剪枝参考链接
ID3算法
C4.5算法
CART回归树算法