ResNet(V2)结构以及Tensorflow实现
Tensorflow实现ResNet_V2
引言:
ResNet是由Kaiming He等4名华人提出,通过使用Residual Unit成功训练了152层的深度神经网络,在ILSVRC 2015比赛中获得冠军,取得了3.57%的top-5错误率,同时参数却比VGGNet少。之后很多方法都建立在ResNet的基础上完成的,例如检测,分割,识别等领域都纷纷使用ResNet。在ResNet推出不久,Google就借鉴了ResNet的精髓,提出了Inception V4和Inception-ResNet-V2,并通过融合这两个模型,在ILSVRC数据集上取得了惊人的3.08%的错误率。所以可见ResNet确实很好用。
-
相关阅读:
VGGNet以及Tensorflow实现
AlexNet以及Tensorflow实现
GoogleInceptionNet_V3以及Tensorflow实现 -
ResNet灵感来源:
这来自于困扰深度学习领域的一个Degradation的问题,即在不断加深神经网络深度时,准确率会先上升然后达到饱和,再持续增加深度则会导致准确率下降。这并不是过拟合的问题,因为不光在测试集上误差增大,训练集本身误差也会增大。 -
ResNet结构:
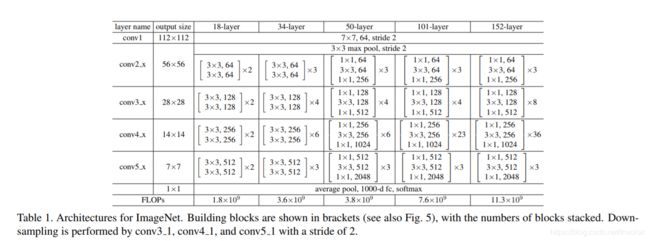
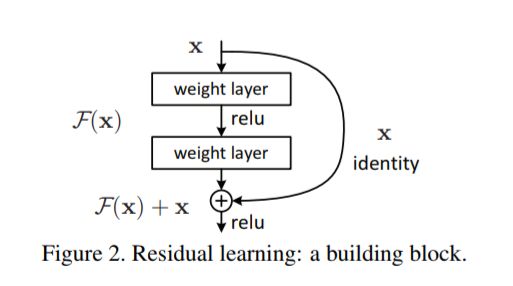
其中,每一列对应的是不同深度的ResNet。此外,表格中每一个用中括号括起来的都是一个残差学习模块组,其内部的结构类似于下图:
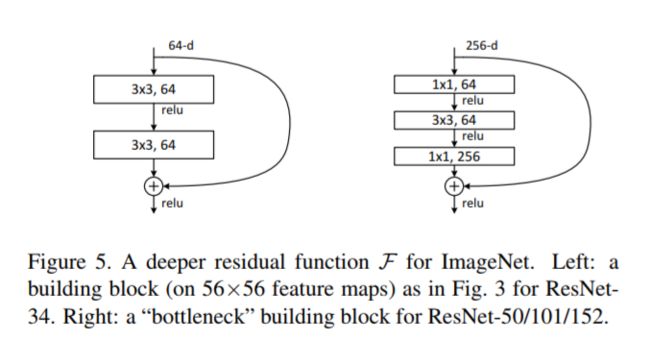
Note: 其实这里有一个小tips,上面右边那张图有两种不同的结构,但是可以发现,如果采用的是第一种结构,则参数数目大约为(这里先假设输入输出都为256-d):
- ResNet_V2的改进之处:

- 作者通过研究ResNet残差学习单元的传播公式,发现前馈和反馈信号可以直接传输,因此最后的非线性激活函数(如Relu)替换了为了恒等映射(Identity Mapping)
y = x y = x y=x,从而使得训练变得更加容易 - 在每一层中都使用BN,这样处理之后,新的残差单元将比以前更容易训练且泛化性更强
- 模块化方法:
本文将通过模块化加注释的方法,来实现ResNet_V2,这样可以帮助初学者快速读懂其结果以及实现方法
- 导入包并设计Block模块组
- 定义部分方法
- 定义生成ResNet V2的主函数
- 定义不同深度的ResNet网络结构
- 定义耗时(测试用)
导入包并设计Block模块组:
import collections
import tensorflow as tf
from datetime import datetime
import math
import time
slim = tf.contrib.slim
'''
使用collectin.namedtuple设计ResNet基本Block模块组
示例:
MyTupleClass = collections.namedtuple('MyTupleClass',['name', 'age', 'job'])
obj = MyTupleClass("Tomsom",12,'Cooker')
print(obj.name)
print(obj.age)
print(obj.job)
执行结果:
Tomsom
12
Cooker
'''
Block = collections.namedtuple('Block', ['scope', 'unit_fn', 'args'])
定义部分方法:
# 实行降采样,如果factor不为1就以factor为步长降采样
def subsample(inputs, factor, scope = None):
if factor == 1:
return inputs
else:
return slim.max_pool2d(inputs, [1, 1], stride = factor, scope = scope)
# 依据步长选择卷积策略
def conv2d_same(inputs, num_outputs, kernel_size, stride, scope=None):
if stride == 1: # 如果stride == 1, 直接进行卷积
return slim.conv2d(inputs, num_outputs, kernel_size, stride = 1,
padding = 'SAME', scope = scope)
else: # 如果stride != 1
pad_total = kernel_size - 1
pad_beg = pad_total // 2 # 上方、左方填充0的列数(行数)
pad_end = pad_total - pad_beg # 下方、右方填充0的列数(行数)
inputs = tf.pad(inputs, [[0,0], [pad_beg, pad_end], [pad_beg, pad_end], [0,0]]) # 进行全0填充
return slim.conv2d(inputs, num_outputs, kernel_size, stride = stride, padding = 'VALID', scope = scope)
# 下面等价于slim.add_arg_scope(stack_blocks_dense)
@slim.add_arg_scope
def stack_blocks_dense(net, blocks, outputs_collections = None):
'''
定义堆叠Blocks的函数
net: 输入
blocks: 之前定义的Block的class的列表
outputs_collections: 用来收集各个end_point的collections
'''
for block in blocks:
with tf.variable_scope(block.scope, 'block', [net]) as sc:
for i, unit in enumerate(block.args):
with tf.variable_scope('unit_%d' % (i+1), values = [net]):
unit_depth, unit_depth_bottleneck, unit_stride = unit
# unit_fn: 残差学习单元的生成函数,顺序地创建并连接所有的残差学习单元
net = block.unit_fn(net, depth = unit_depth,
depth_bottleneck = unit_depth_bottleneck,
stride = unit_stride)
# collect_named_outputs: 将输出net添加到collection中
net = slim.utils.collect_named_outputs(outputs_collections, sc.name, net)
return net
# 创立ResNet通用的arg_scope
def resnet_arg_scope(is_training = True,
weight_decay = 0.0001,
batch_norm_decay = 0.997,
batch_norm_epsilon = 1e-5,
batch_norm_scale = True):
'''
weight_decay: 权重衰减速率, 即下面L2所占比
batch_norm_decay: BN衰减速率
batch_norm_epsilon: BN的epsilon
batch_norm_scale: BN的scale默认为True, 即乘以公式中的gamma
'''
batch_norm_paras = {
'is_training': is_training,
'decay': batch_norm_decay,
'epsilon': batch_norm_epsilon,
'scale': batch_norm_scale,
'updates_collections': tf.GraphKeys.UPDATE_OPS
}
# 设置slim.conv2d()中的参数默认值
with slim.arg_scope([slim.conv2d],
weights_regularizer = slim.l2_regularizer(weight_decay),
weights_initializer = slim.variance_scaling_initializer(),
activation_fn = tf.nn.relu,
normalizer_fn = slim.batch_norm,
normalizer_params = batch_norm_paras):
# 设置slim.batch_norm中的参数默认值,**batch_norm_para是解包的作用,把对应参数值分配给BN中的参数
with slim.arg_scope([slim.batch_norm], **batch_norm_paras):
# 设置最大池化的默认参数
with slim.arg_scope([slim.max_pool2d], padding = 'SAME') as arg_sc:
return arg_sc
# 定义核心的bottleneck残差学习单元(是ResNet V2论文提到的Full Preactivation Residual Net的一个变种)
@slim.add_arg_scope
def bottleneck(inputs, depth, depth_bottleneck, stride,
outputs_collections = None, scope = None):
'''
inputs: 输入
depth, depth_bottleneck, stride: Blocks类中的args
outputs_collection: 收集end_points的collection
scope: 当前unit的名称
'''
with tf.variable_scope(scope, 'bottleneck_v2', [inputs]) as sc:
# 获取输入的最后一个维度
depth_in = slim.utils.last_dimension(inputs.get_shape(), min_rank = 4)
# 对输入进行预BN操作
preact = slim.batch_norm(inputs, activation_fn = tf.nn.relu, scope = 'preact')
if depth == depth_in: # 如果残差单元的输入通道数depth_in与输出通道数depth相同
shortcut = subsample(inputs, stride, 'shortcut')
else: # 如果输入与输出通道不一致,则用stride=1的卷积操作改变通道数
shortcut = slim.conv2d(preact, depth, [1, 1], stride = stride,
normalizer_fn = None,
activation_fn = None,
scope = 'shortcut')
# 输出通道数为depth_bottleneck的卷积, 卷积核1x1
residual = slim.conv2d(preact, depth_bottleneck, [1, 1],
stride = 1, scope = 'conv1')
# 3表示卷积核尺寸3x3(帮你看代码抗"过拟合")
residual = conv2d_same(residual, depth_bottleneck, 3,
stride, scope = 'conv2')
# 输出通道数为depth, 卷积核1x1
residual = slim.conv2d(residual, depth, [1, 1], stride = 1,
normalizer_fn = None, activation_fn = None,
scope = 'conv3')
# 实现Residual output的结果
output = residual + shortcut
# 将结果添加入collection,并返回output作为函数结果
return slim.utils.collect_named_outputs(outputs_collections, sc.name, output)
定义生成ResNet V2的主函数:
def resnet_v2(inputs, blocks, num_classes = None,
global_pool = True,
include_root_block = True,
reuse = None,
scope = None):
'''
inputs: 输入
blocks: 定义好的Block类的列表
num_classes: 最后输出的类数
global_pool: 标志是否加上最后一层的全局平均池化
include_root_block: 标志是否加上ResNet网络最前面通常使用的7x7卷积和最大池化
reuse: 标志是否重用
scope: 整个网络的名称
'''
with tf.variable_scope(scope, 'resnet_v2', [inputs], reuse = reuse) as sc:
end_points_collection =sc.original_name_scope + '_end_point'
# 设置outputs_collections默认参数为end_points_collection
with slim.arg_scope([slim.conv2d, bottleneck, stack_blocks_dense],
outputs_collections = end_points_collection):
net = inputs
if include_root_block:
# 设置slim.conv2d的默认参数
with slim.arg_scope([slim.conv2d], activation_fn = None,
normalizer_fn = None):
# 创建ResNet最前面64输出通道步长为2的7x7卷积
net = conv2d_same(net, 64, 7, stride = 2, scope = 'conv1')
# 接步长为2的3x3池化
net = slim.max_pool2d(net, [3, 3], stride = 2, scope = 'pool1') # 执行完后,图片尺寸以缩小为1/4
# 用stack_blocks_dense把残差学习模块生成好
net = stack_blocks_dense(net, blocks)
net = slim.batch_norm(net, activation_fn = tf.nn.relu, scope = 'postnorm')
if global_pool: # 如果要进行全局平均池化层
net = tf.reduce_mean(net, [1, 2], name = 'pool5', keep_dims = True)
if num_classes is not None: # 用卷积操作替代全连接层(添加一个输出通道为num_classes的1x1卷积)
net = slim.conv2d(net, num_classes, [1, 1], activation_fn = None, normalizer_fn = None, scope = 'logits')
# 将collection转为dict
end_points = slim.utils.convert_collection_to_dict(end_points_collection)
if num_classes is not None:
end_points['predictions'] = slim.softmax(net, scope = 'prediction')
return net, end_points
定义不同深度的ResNet网络结构:
# 50层深度的ResNet网络配置
def resnet_v2_50(inputs, num_classes = None,
global_pool = True,
reuse = None,
scope = 'resnet_v2_50'):
'''
以下面Block('block1', bottleneck, [(256, 64, 1)] * 2 + [(256, 64, 2)])为例
block1: 是这个Block的名称
bottleneck: 前面定义的残差学习单元(有三层)
[(256, 64, 1)] * 2 + [(256, 64, 2)]: 是一个列表,其中每个元素都对应一个bottleneck
残差学习单元,前面两个元素都是(256, 64, 1),最后一个是(256, 64, 2)。每个元素都
时一个3元组,即(depth, depth_bottleneck, stride),代表构建的bottleneck残差学
习单元中,第三层的输出通道为256(depth),前两层的输出通道数为64(depth_bottleneck)
且中间那层的步长stride为1(stride)
'''
blocks = [
Block('block1', bottleneck, [(256, 64, 1)] * 2 + [(256, 64, 2)]),
Block('block2', bottleneck, [(512, 128, 1)] * 3 + [(512, 128, 2)]),
Block('block3', bottleneck, [(1024, 256, 1)] * 5 + [(1024, 256, 2)]),
Block('block4', bottleneck, [(2048, 512, 1)] * 3)]
return resnet_v2(inputs, blocks, num_classes, global_pool,
include_root_block = True, reuse = reuse,
scope = scope)
# 101层深度的ResNet网络配置
def resnet_v2_101(inputs, num_classes = None,
global_pool = True,
reuse = None,
scope = 'resnet_v2_101'):
blocks = [
Block('block1', bottleneck, [(256, 64, 1)] * 2+ [(256, 64, 2)]),
Block('block2', bottleneck, [(512, 128, 1)] * 3 + [(512, 128, 2)]),
Block('block3', bottleneck, [(1024, 256, 1)] * 22 + [(1024, 256, 2)]),
Block('block4', bottleneck, [(2048, 512, 1)] * 3)]
return resnet_v2(inputs, blocks, num_classes, global_pool,
include_root_block = True, reuse = reuse,
scope = scope)
# 152层深度的ResNet网络配置
def resnet_v2_152(inputs, num_classes = None,
global_pool = True,
reuse = None,
scope = 'resnet_v2_152'):
blocks = [
Block('block1', bottleneck, [(256, 64, 1)] * 2 + [(256, 64, 2)]),
Block('block2', bottleneck, [(512, 128, 1)] * 7 + [(512, 128, 2)]),
Block('block3', bottleneck, [(1024, 256, 1)] * 35 + [(1024, 256, 2)]),
Block('block4', bottleneck, [(2048, 512, 1)] * 3)]
return resnet_v2(inputs, blocks, num_classes, global_pool,
include_root_block = True, reuse = reuse,
scope = scope)
# 200层深度的ResNet网络配置
def resnet_v2_200(inputs, num_classes = None,
global_pool = True,
reuse = None,
scope = 'resnet_v2_200'):
blocks = [
Block('block1', bottleneck, [(256, 64, 1)] * 2 + [(256, 64, 2)]),
Block('block2', bottleneck, [(512, 128, 1)] * 23 + [(512, 128, 2)]),
Block('block3', bottleneck, [(1024, 256, 1)] * 35 + [(1024, 256, 2)]),
Block('block4', bottleneck, [(2048, 512, 1)] * 3)]
return resnet_v2(inputs, blocks, num_classes, global_pool,
include_root_block = True, reuse = reuse,
scope = scope)
定义耗时:
def time_tensorflow_run(session, target, info_string):
num_steps_burn_in = 10 # 打印阈值
total_duration = 0.0 # 每一轮所需要的迭代时间
total_duration_aquared = 0.0 # 每一轮所需要的迭代时间的平方
for i in range(num_batches + num_steps_burn_in):
start_time = time.time()
_ = session.run(target)
duration = time.time() - start_time # 计算耗时
if i >= num_steps_burn_in:
if not i % 10:
print("%s : step %d, duration = %.3f" % (datetime.now(), i - num_steps_burn_in, duration))
total_duration += duration
total_duration_aquared += duration * duration
mn = total_duration / num_batches # 计算均值
vr = total_duration_aquared / num_batches - mn * mn # 计算方差
sd = math.sqrt(vr) # 计算标准差
print("%s : %s across %d steps, %.3f +/- %.3f sec/batch" % (datetime.now(), info_string, num_batches, mn, sd))
测试:
注:CNN的训练都是比较耗时的,所以这里也就是测试一下几张随机生成图的前向和反向传播过程
batch_size = 32
height, width = 224, 224
inputs = tf.random_uniform((batch_size, height, width, 3))
with slim.arg_scope(resnet_arg_scope(is_training = False)):
net, end_points = resnet_v2_152(inputs, 1000)
with tf.Session() as sess:
init = tf.global_variables_initializer()
sess.run(init)
num_batches = 100
time_tensorflow_run(sess, net, "Forward")
运行效果:
WARNING:tensorflow:From :34: calling reduce_mean (from tensorflow.python.ops.math_ops) with keep_dims is deprecated and will be removed in a future version.
Instructions for updating:
keep_dims is deprecated, use keepdims instead
2019-01-26 08:10:51.879413 : step 0, duration = 0.486
2019-01-26 08:10:56.748640 : step 10, duration = 0.487
2019-01-26 08:11:01.628659 : step 20, duration = 0.489
2019-01-26 08:11:06.511324 : step 30, duration = 0.489
2019-01-26 08:11:11.410210 : step 40, duration = 0.490
2019-01-26 08:11:16.311633 : step 50, duration = 0.491
2019-01-26 08:11:21.219118 : step 60, duration = 0.493
2019-01-26 08:11:26.133231 : step 70, duration = 0.492
2019-01-26 08:11:31.054586 : step 80, duration = 0.493
2019-01-26 08:11:35.984226 : step 90, duration = 0.494
2019-01-26 08:11:40.435636 : Forward across 100 steps, 0.490 +/- 0.002 sec/batch
[1] He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2016: 770-778.
[2] He K, Zhang X, Ren S, et al. Identity mappings in deep residual networks[C]//European conference on computer vision. Springer, Cham, 2016: 630-645.
[3] Tensorflo实战.黄文坚,唐源
如果觉得我有地方讲的不好的或者有错误的欢迎给我留言,谢谢大家阅读(点个赞我可是会很开心的哦)~