Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint
文章目录
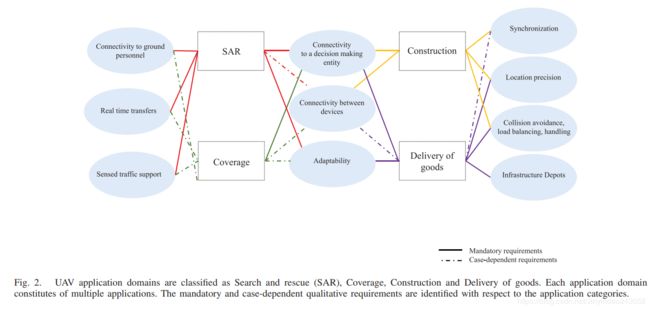
- 目前UAV通信的需求和应用分类
- Mobility 的几个限制因素
- Device Autonomy
- 无人机路径由谁决定?
- 自动化水平决定了UAV和remote controlled (RC)之间信息交换(exchange)的需求量
- 收集来的数据被送往:
- 飞行安全性
- Mission Autonomy
- 中心化计算路径的好处:
- 分布式计算路径的好处:
- mission autonomy 的衡量:
- mission data
文章题目:Survey on Unmanned Aerial Vehicle Networks for Civil Applications: A Communications Viewpoint
链接:https://ieeexplore.ieee.org/document/7463007
以下是精彩片段的摘录
目前UAV通信的需求和应用分类
Mobility 的几个限制因素
-
Thus, not only may the terrain over which the UAVs are flying change frequently, but also the altitude of flight may have to be varied to avoid obstacles and collisions.
因此,不仅UAV在其上飞行的地形可能经常变化,而且飞行高度也可能必须改变以避免障碍物和碰撞。 -
It is stated that even though high altitudes correspond to a larger field of view, the currently available sensors are constrained in their accuracy, and hence prevent the UAVs from flying beyond certain altitude levels.
据指出,即使高海拔对应较大的视野,目前可用的传感器的准确性也受到限制,因此会阻止无人机飞行超过某些海拔高度。 -
Thus, for higher detection probabilities, the UAVs may be constrained in their flight altitudes and speeds.
因此,为了获得更高的检测概率,无人机可能会受到其飞行高度和速度的限制。 -
Wind speed at higher altitude is also a limiting factor, as commercially available UAVs are currently unable to sustain stable operation during high winds and other adverse weather conditions.
高海拔地区的风速也是一个限制因素,因为目前商用无人机在强风和其他不利天气条件下无法维持稳定运行。
Device Autonomy
remote controlled (RC)
无人机路径由谁决定?
It is important to note that to ensure safety, UAVs are obligated by law to stay in RC range for human intervention in case of an emergency.
UAVs can fly autonomously following pre-computed or adaptive waypoints. These waypoints can be decided by a central processing entity, like a base station, and then sent over a communication link to the UAV.
The UAV can also decide its path on-the-fly by using the information collected from the environment (terrain, obstacles, as well as presence of other UAVs) via on-board sensors.
重要的是要注意,为了确保安全,根据法律,无人机必须在紧急情况下保持在RC范围内,以供人为干预。
无人机可以按照预先计算的或自适应的航路点自主飞行:(1) 这些航路点可以由中央处理实体(如基站)确定,然后通过通信链路发送到UAV。 (2) 无人机还可以通过机载传感器使用从环境中收集的信息(地形,障碍物以及其他无人机的存在)动态决定其路径。
自动化水平决定了UAV和remote controlled (RC)之间信息交换(exchange)的需求量
For instance, when there is no device autonomy, and a human operator is responsible for the control and navigation of the UAV through an RC, the traffic that is required to be exchanged between the UAV and the RC unit is the control traffic.
If we go a step further in the level of control autonomy, where a central entity can provide waypoints to the UAV to fly autonomously, the data exchange requirements change and also include support for coordination traffic. For fully autonomous devices, where the next waypoint to fly is decided on-board the UAV itself, the UAV is required to be equipped with some sensors to locate itself related to obstacles and other UAVs in its vicinity. In this case, the RC traffic exchange is accompanied by the demand for sensed data exchange as well.
例如,当没有设备自主权,并且由操作员负责通过RC进行无人机的控制和导航时,需要在无人机和RC单元之间交换的流量就是控制流量。
如果我们在控制自治级别上更进一步,中央实体可以为无人机提供航路点以实现自主飞行,则数据交换要求会发生变化,并且还包括对协调流量的支持。
对于完全自主的设备,要在无人机上确定下一个要飞行的航点,则无人机必须配备一些传感器,以定位与障碍物和附近其他无人机有关的自身。 在这种情况下,RC流量交换也伴随着对感知数据交换的需求。
收集来的数据被送往:
This sensed data is to be provided to the on-board processing unit, and may also be provided to a central entity (for decision making by ground personnel).
部分UAV为其他UAV规划路线
in case of, for example, a disaster situation, or for providing a higher level of redundancy to ensure safety). Additionally, some coordination traffic exchange may be required amongst the decision-making UAVs for acquiring knowledge of the individual path plans of the neighboring UAVs.
飞行安全性
For a fail safe communication system design, it is important to consider the basic control information exchange requirements that enable device autonomy.
例如 The device performs emergency landing if no command is received in a duration of 2 seconds.
Mission Autonomy
Mission autonomy relates to the coordination between the entities in the network, including UAVs, base stations and other devices forming part of the network.
中心化计算路径的好处:
Having a central decision making entity (DME) offers a simpler solution than a distributed system : in terms of design and processing power required on-board each device.
分布式计算路径的好处:
Distributed decision making may offer superior solutions in situations where avoiding a single point of failure is desired.
Also, parallel processing on-board multiple devices may be a desirable attribute to increase time efficiency.
mission autonomy 的衡量:
An offline, centralized decision provides the least amount of mission autonomy, while an online decision, made in a distributed manner, ensures highest level of mission autonomy.
telemetry 遥测技术;


In case of maximum information exchange, additionally, sensed data needs to be exchanged.
mission data
We divide the exchanged mission data into telemetry, coordination, and sensed data.
- telemetry includes the inertial measurement unit (IMU) and global positioning system (GPS) information [71].
- Coordination data is any data that needs to be exchanged for coordinating the entities in the network. This may include synchronization information, flight path decisions, routing information, etc.
- sensed data encompasses anything that is used to measure the physical environment. The information exchange before the mission starts (offline decision dissemination) and RC data exchange is not considered here.