图像边缘检测的Sobel和Laplace算子和图像最近邻插值和双线性插值算法的Python实现(附完整代码)
1.概述
计算机视觉课程要求实现一下图像边缘检测算法,但并没有明确要求实现哪种具体的算法,在网上看了相关图像边缘检测算子,都有非常具体的介绍,也有实现代码或者Python集成库里的代码,有的算子比较简单,很容易理解,例如Sobel、Laplace等,Sobel还有一系列延伸的算子,很相似,这些都还是比较简单的,还有一些稍微复杂点的算子,例如Canny,具体关于这些算法原理的介绍推荐去看深入学习OpenCV中几种图像边缘检测算子这篇文章,写的非常棒。看了一些博主写的代码,写的非常好,但是跟我想象中所要求的还是有一些出入,所以我在这个代码的基础上进行了一些修改。本次作业我选择了实现Sobel和Laplace两个比较简单的算法,这里作个记录。
2.Sobel和Laplace简单介绍和实现
2.1 Sobel算子
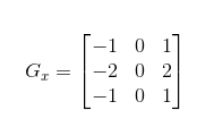
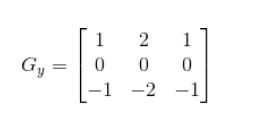
Sobel算子包括横向和纵向两种模板,把横向模板记为 G x Gx Gx,把纵向模板记为 G y Gy Gy,其中:
在计算时,首先需要将图像转成灰度图,直接用下面的方法即可,参数 0 0 0代表读取灰度图。
gray_saber = cv2.imread("C:/Users/ALIENWARE/Pictures/Camera Roll/mcqueen.jpg",0)
然后只需要将上述模板看成一个“元素矩阵”或者“基本矩阵”,然后依次与灰度图中每个相同大小的矩阵进行相乘(当然,图像中每个矩阵中的值都代表图中的灰度值),然后将每个矩阵与“基本矩阵”相乘之后所有元素求和,即:
G x ′ = s u m ( G x ∗ A i ) G y ′ = s u m ( G y ∗ A i ) Gx^\prime=sum(Gx*A_i)\\Gy^\prime=sum(Gy*A_i) Gx′=sum(Gx∗Ai)Gy′=sum(Gy∗Ai)其中 A A A为灰度图矩阵, A i A_i Ai即代表灰度图矩阵中每个大小为 3 × 3 3\times3 3×3的矩阵, s u m ( ) sum( ) sum()就代表将矩阵中所有元素求和操作。
def SobelOperator(roi, operator_type):
if operator_type == "horizontal":
sobel_operator = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]]) #横向模板
elif operator_type == "vertical":
sobel_operator = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]]) #纵向模板
else:
raise ("type Error")
result = np.abs(np.sum(roi * sobel_operator))
return result
这样计算之后,再取这两个模板结果的几何平均值作为每个坐标位置的新的灰度值(其实这样必然会造成图片上某些点没有被处理,但是几乎没有什么影响),即:
G = G x ′ 2 + G y ′ 2 G=\sqrt{{Gx^\prime}^2+{Gy^\prime}^2} G=Gx′2+Gy′2
实现代码如下:
def SobelAlogrithm(image):
new_image1 = np.zeros(image.shape)
new_image2 = np.zeros(image.shape)
for i in range(1, image.shape[0] - 1):
for j in range(1, image.shape[1] - 1):
new_image1[i - 1, j - 1] = SobelOperator(image[i - 1:i + 2, j - 1:j + 2], 'horizontal')
new_image2[i - 1, j - 1] = SobelOperator(image[i - 1:i + 2, j - 1:j + 2], 'vertical')
new_image1 = np.sqrt(new_image1*new_image1+new_image2*new_image2)
new_image1 = 255 - new_image1*(255 / np.max(new_image1)) #将图片像素值取反
return new_image1.astype(np.uint8)
2.2 LapLace算子
Laplace算子的操作过程与Sobel算子基本一样,但是原理肯定大不相同。Laplace算子具有4邻域模板和8邻域模板,与Sobel算子不同的是,Sobel算子在计算最终图像的灰度值时,需要同时利用到横向模板和纵向模板计算的结果,而Laplace算子的两个模板只是多了一种选择,可以根据不同情况选择使用哪种模板进行操作。4邻域模板和8邻域模板分别为:

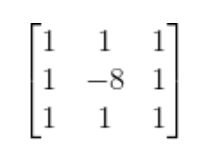
同样的,把模板看做为“元素矩阵”或“基本矩阵”与灰度图矩阵相乘,并将相乘得到的矩阵中所有元素求和,作为图像对应坐标位置的灰度值。(这里以4邻域模板 G 4 G_4 G4作为例子)
G = s u m ( G 4 ∗ A i ) G = sum(G_4*A_i) G=sum(G4∗Ai)代码如下:
def LaplaceOperator(roi, operator_type):
if operator_type == "fourfields":
laplace_operator = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]])
elif operator_type == "eightfields":
laplace_operator = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]])
else:
raise ("type Error")
result = np.abs(np.sum(roi * laplace_operator))
return result
3.实验结果与完整代码
3.1 实验结果
首先放张原图(太白山游客照)

读取到的灰度图为

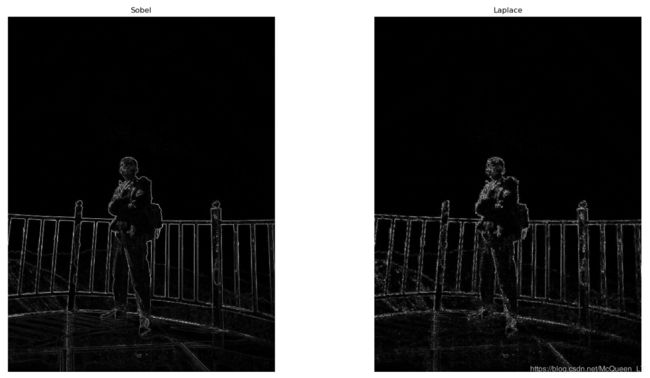
最后用Sobel和Laplace方法得到的边缘检测结果如下
3.2 完整代码
接下来就是完整代码了!!!
import cv2
import matplotlib.pyplot as plt
import numpy as np
def SobelOperator(roi, operator_type):
if operator_type == "horizontal":
sobel_operator = np.array([[-1, -2, -1], [0, 0, 0], [1, 2, 1]])
elif operator_type == "vertical":
sobel_operator = np.array([[-1, 0, 1], [-2, 0, 2], [-1, 0, 1]])
else:
raise ("type Error")
result = np.abs(np.sum(roi * sobel_operator))
return result
def SobelAlogrithm(image):
new_image1 = np.zeros(image.shape)
new_image2 = np.zeros(image.shape)
for i in range(1, image.shape[0] - 1):
for j in range(1, image.shape[1] - 1):
new_image1[i - 1, j - 1] = SobelOperator(image[i - 1:i + 2, j - 1:j + 2], 'horizontal')
new_image2[i - 1, j - 1] = SobelOperator(image[i - 1:i + 2, j - 1:j + 2], 'vertical')
new_image1 = np.sqrt(new_image1*new_image1+new_image2*new_image2)
new_image1 = 255 - new_image1*(255 / np.max(new_image1))
return new_image1.astype(np.uint8)
def LaplaceOperator(roi, operator_type):
if operator_type == "fourfields":
laplace_operator = np.array([[0, 1, 0], [1, -4, 1], [0, 1, 0]])
elif operator_type == "eightfields":
laplace_operator = np.array([[1, 1, 1], [1, -8, 1], [1, 1, 1]])
else:
raise ("type Error")
result = np.abs(np.sum(roi * laplace_operator))
return result
def LaplaceAlogrithm(image, operator_type):
new_image = np.zeros(image.shape)
image = cv2.copyMakeBorder(image, 1, 1, 1, 1, cv2.BORDER_DEFAULT)
for i in range(1, image.shape[0] - 1):
for j in range(1, image.shape[1] - 1):
new_image[i - 1, j - 1] = LaplaceOperator(image[i - 1:i + 2, j - 1:j + 2], operator_type)
new_image = 255-new_image * (255 / np.max(image))
return new_image.astype(np.uint8)
gray_saber = cv2.imread("C:/Users/ALIENWARE/Pictures/Camera Roll/mcqueen.jpg",0)
plt.subplot(121)
plt.title("Sobel")
plt.imshow(SobelAlogrithm(gray_saber),cmap="binary")
plt.axis("off")
plt.subplot(122)
plt.title("Laplace")
plt.imshow(LaplaceAlogrithm(gray_saber, "fourfields"), cmap="binary")
plt.axis("off")
plt.show()
最后,再次感谢深入学习OpenCV中几种图像边缘检测算子这边文章!!!
补充一个图像最近邻插值和双线性插值算法的代码(就是把代码存在这里,等有时间了在好好整理一下)
import cv2
import numpy as np
import matplotlib.pyplot as plt
def nearestInterpolation(originImg, scale):
newImgRows = round(originImg.shape[0]*scale)
newImgCols = round(originImg.shape[1]*scale)
newImg = np.zeros(shape= [newImgRows,newImgCols,3],dtype=np.uint8) #3通道图像
for i in range(newImg.shape[0]):
for j in range(newImg.shape[1]):
row_int = round(i/scale)
col_int = round(j/scale)
if row_int == originImg.shape[0] or col_int == originImg.shape[1]:
row_int -= 1
col_int -= 1
newImg[i][j] = originImg[row_int][col_int]
return newImg
def bilinearInterpolation(originImg, scale):
newImgRows = round(originImg.shape[0]*scale)
newImgCols = round(originImg.shape[1]*scale)
newImg = np.zeros(shape=[newImgRows,newImgCols,3],dtype=np.uint8)
for i in range(newImg.shape[0]):
for j in range(newImg.shape[1]):
row = i/scale
col = j/scale
row_int = int(row)
col_int = int(col)
u = row-row_int
v = col-col_int
if row_int == originImg.shape[0]-1 or col_int == originImg.shape[1]-1:
row_int -= 1
col_int -= 1
newImg[i][j] = (1-u)*(1-v)*originImg[row_int][col_int]+(1-u)*v*originImg[row_int][col_int+1]+\
+ u * (1 - v) * originImg[row_int + 1][col_int] + u * v * originImg[row_int + 1][col_int + 1]
return newImg
if __name__ == '__main__':
img = cv2.imread("C:/Users/ALIENWARE/Pictures/Camera Roll/mcqueen.jpg",1)
method = int(input('choose a method(1/nearest 2/bilinear): '))
scale = float(input('input a scale you want: '))
if method == 1:
newImg = nearestInterpolation(img,scale)
if method == 2:
newImg = bilinearInterpolation(img,scale)
print("new img's shape is: ",newImg.shape)
newImg = cv2.cvtColor(newImg, cv2.COLOR_RGB2BGR)
plt.title('newImg')
plt.imshow(newImg)
plt.show()
img = cv2.cvtColor(img,cv2.COLOR_RGB2BGR)
plt.title('img')
plt.imshow(img)
plt.show()