论文分享-- >SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient
博客内容将首发在微信公众号"跟我一起读论文啦啦",上面会定期分享机器学习、深度学习、数据挖掘、自然语言处理等高质量论文,欢迎关注!

本次要分享和总结的论文为: S e q G A N : S e q u e n c e G e n e r a t i v e A d v e r s a r i a l N e t s w i t h P o l i c y G r a d i e n t SeqGAN:\ Sequence\ Generative\ Adversarial\ Nets\ with\ Policy\ Gradient SeqGAN: Sequence Generative Adversarial Nets with Policy Gradient,其论文链接SeqGAN,源自 A A A I − 17 AAAI-17 AAAI−17,参考的实现代码链接代码实现。
本篇论文结合了 G A N GAN GAN 和 R L RL RL 的知识,整篇论文读下来难度较大,在这里就浅薄的谈下自己的见解。
好了,老规矩,带着代码分析论文。
动机
- 我们知道 G A N GAN GAN 网络在计算机视觉上得到了很好的应用,然而很可惜的是,其在自然语言处理上并不 w o r k work work,最初的 G A N s GANs GANs 仅仅定义在实数领域, G A N s GANs GANs 通过训练出的生成器来产生合成数据,然后在合成数据上运行判别器,判别器的输出梯度将会告诉你,如何通过略微改变合成数据而使其更加现实。一般来说只有在数据连续的情况下,你才可以略微改变合成的数据,而如果数据是离散的,则不能简单的通过改变合成数据。例如,如果你输出了一张图片,其像素值是 1.0 1.0 1.0,那么接下来你可以将这个值改为 1.0001 1.0001 1.0001。如果输出了一个单词“penguin”,那么接下来就不能将其改变为“penguin + .001”,因为没有“penguin +.001”这个单词。 因为所有的自然语言处理( N L P NLP NLP)的基础都是离散值,如“单词”、“字母”或者“音节”, N L P NLP NLP 中应用 G A N s GANs GANs 是非常困难的。
- G A N GAN GAN 只能衡量一个完整的句子的好坏程度,对于部分生成的句子,很难预测其后面的部分,无法很好的对其打分。
- 在传统的 s e q 2 s e q seq2seq seq2seq 模型中,我们通常用 m a x l i k e l i h o o d max\ likelihood max likelihood 来训练模型,但是这个训练方式也存在一个严重的问题,也就是论文中所说的 e x p o s u r e b i a s exposure\ bias exposure bias ,在模型训练阶段,我们用 t r u e t o k e n s true\ tokens true tokens 作为 d e c o d e r _ i n p u t decoder\_input decoder_input,但是在真正的预测阶段时,我们只能从上一步产生的分布中以某种方式抽样某一个 t o k e n token token 作为下一步的 d e c o d e r _ i n p u t decoder\_input decoder_input,也就是这个阶段的 d e o c d e r _ i n p u t deocder\_input deocder_input 的分布可能是不一样的。
论文的大体思路
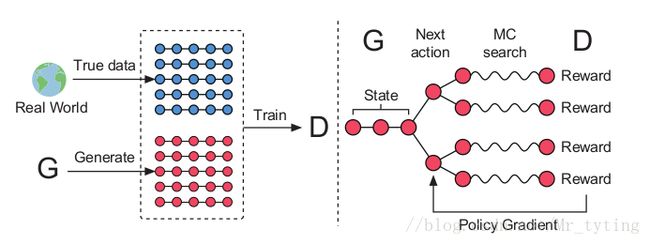
我们先看左图:现在有一批 t r u e _ d a t a true\_data true_data,生成器生成一批假数据,我们利用 M L E MLE MLE 的方式来 p r e t r a i n pretrain pretrain 生成器,也就是让生成器不断拟合 t r u e _ d a t a true\_data true_data 的分布。这个过程经过几个回合;然后把训练好的生成器生成的数据作为 n e g t i v e _ d a t a negtive\_data negtive_data, T r u e _ d a t a True\_data True_data 作为 p o s i t i v e _ d a t a positive\_data positive_data 来 p r e t r a i n pretrain pretrain 判别器。 这样就 p r e t r a i n pretrain pretrain 出了生成器和判别器。
再看右图:先了解下强化学习的四个重要概率: s t a t e , a c t i o n , p o l i c y , r e w a r d state, action, policy, reward state,action,policy,reward, s t a t e state state 为现在已经生成的 t o k e n s tokens tokens , a c t i o n action action是下一个即将生成的 t o k e n token token , p o l i c y policy policy 为 G A N GAN GAN 的生成器, r e w a r d reward reward 为 G A N GAN GAN 的判别器所回传的信息。
带着代码仔细分析各个部分
在实现代码中,生成器是一个 L S T M LSTM LSTM 神经网络,判别器是一个 C N N CNN CNN 网络,其 t r u e _ d a t a true\_data true_data 是由一个 t a r g e t _ L S T M target\_LSTM target_LSTM 生成的。
pretrain
由上面的分析可知,在 p r e t r a i n pretrain pretrain 生成器时,只是利用 M L E MLE MLE 的方法来训练,不需要考虑 r e w a r d reward reward。
我们先看看代码中是如何 p r e t a i n pretain pretain 生成器的:
for epoch in xrange(PRE_EPOCH_NUM):
## gen_data_loader存储真实数据。
loss = pre_train_epoch(sess, generator, gen_data_loader)##该操作为利用MLE训练生成器
if epoch % 5 == 0:
┆ generate_samples(sess, generator, BATCH_SIZE, generated_num, eval_file)## 利用生成器生成一批假数据
┆ likelihood_data_loader.create_batches(eval_file)##将假数据存进likelihood_data_loader
┆ test_loss = target_loss(sess, target_lstm, likelihood_data_loader)##测试下当前生成的假数据与target_lstm生成的真实数据的loss
┆ print 'pre-train epoch ', epoch, 'test_loss ', test_loss
┆ buffer = 'epoch:\t'+ str(epoch) + '\tnll:\t' + str(test_loss) + '\n'
┆ log.write(buffer)
以上过程循环 P R E _ E P O C H _ N U M PRE\_EPOCH\_NUM PRE_EPOCH_NUM 个循环,不断的 p r e t r a i n pretrain pretrain 生成器。
再来看看怎么 p r e t r a i n pretrain pretrain 判别器的:
for _ in range(50):
generate_samples(sess, generator, BATCH_SIZE, generated_num, negative_file)##上面的生成器生成一批负样本
dis_data_loader.load_train_data(positive_file, negative_file)
for _ in range(3):
┆ dis_data_loader.reset_pointer()
┆ for it in xrange(dis_data_loader.num_batch):
┆ ┆ x_batch, y_batch = dis_data_loader.next_batch()##获取一个batch数据,二分类
┆ ┆ feed = {
┆ ┆ ┆ discriminator.input_x: x_batch,
┆ ┆ ┆ discriminator.input_y: y_batch,
┆ ┆ ┆ discriminator.dropout_keep_prob: dis_dropout_keep_prob
┆ ┆ }
## 判别器是一个二分类的CNN网络,利用cross-entropy作为损失函数。
┆ ┆ _ = sess.run(discriminator.train_op, feed)##训练判别器
生成器的目标函数
由强化学习的相关知识,我们可知其目标就是 m a x i m i z e e x p e c t e d e n d r e w a r d maximize\ expected\ end\ reward maximize expected end reward,也就是生成器生成了一句完整的句子后,我们希望尽可能的使其所有 t o k e n s tokens tokens 的 r e w a r d reward reward 之和尽可能的大,也就是如何公式:
J ( θ ) = E [ R T ∣ S 0 , θ ] = ∑ y 1 ∈ Y G θ ( y 1 ∣ s 0 ) ∗ Q D ϕ G θ ( s 0 , y 1 ) J(\theta) = E[R_T|S_0,\theta]=\sum_{y1\in Y}G_{\theta}(y_1|s_0)*Q_{D_\phi }^{G_\theta}(s_0,y_1) J(θ)=E[RT∣S0,θ]=y1∈Y∑Gθ(y1∣s0)∗QDϕGθ(s0,y1)
如何理解上式呢?其中 R T R_T RT 可理解为一个完整句子的 r e w a r d reward reward 之和, s 0 s_0 s0 表示初始状态, θ \theta θ 表示生成器的参数。后面的求和过程表示,每生成一个 t o k e n token token,我们都会计算其生成该 t o k e n token token 的概率与其对应的 r e w a r d reward reward 值,那么两者相乘即表示生成该 t o k e n token token 的期望 r e w a r d reward reward 值。求和后即为该整句的期望 r e w a r d reward reward 值。生成器的目标就是不断的 m a x i m i z e J ( θ ) maximize\ J(\theta) maximize J(θ)。 至于 r e w a r d reward reward 为啥表示成 Q D ϕ G θ Q_{D_\phi }^{G_\theta} QDϕGθ,因为 r e w a r d reward reward 是由后面判别器 D ϕ {D_\phi } Dϕ 决定的。
reward 求法
由上面的 J ( θ ) J(\theta) J(θ) ,如何求每一步的 r e w a r d reward reward 呢?也就是求 D ϕ {D_\phi } Dϕ。论文中提到 G A N GAN GAN 只能对一个完整的句子进行打分,而不能对生成的不完整句子打分,因此引入强化学习的方式:
Q D ϕ G θ ( α = y t , s = Y 1 : T − 1 ) = Q D ϕ ( Y 1 : T ) Q_{D_\phi }^{G_\theta}(\alpha=y_t,s=Y_{1:T-1})=Q_{D_\phi }(Y_{1:T}) QDϕGθ(α=yt,s=Y1:T−1)=QDϕ(Y1:T)
蒙特卡洛树搜索方法:
在 t r a i n train train 的阶段时,我们希望生成器生成的 t o k e n token token 在当前生成概率分布中对应的概率与该 t o k e n token token 的 r e w a r d reward reward 乘积和越大越好(上面的 J ( θ ) J(\theta) J(θ)意义),那么该 t o k e n token token 的 r e w a r d reward reward 如何计算得到呢?要知道只有是一个完整的句子,其判别器才能对其进行打分。例如我们在生成第 t t t 步的 t o k e n token token时,后面的 t o k e n s tokens tokens 是未知的,我们只能让生成器继续向后面生成 t o k e n token token,直到生成一个完整的句子。然后在喂给判别器打分,为了让这个打分更有说服力,我们让这个过程重复 N N N 次,然后取平均的 r e w a r d reward reward,可以用如下图示展示这个过程:
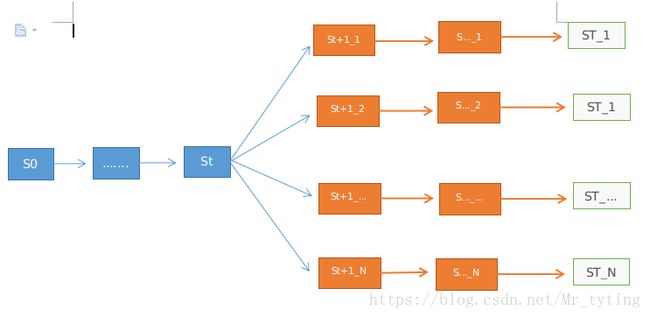
简单来说,就是生成器每生成一个 t o k e n token token 都会有相应的一个 r e w a r d reward reward,而这个 t o k e n token token 后面的 t o k e n s tokens tokens 都是未知的,只能按照生成器来补全,形成一个完整的句子,这个过程进行 N N N 次,会生成 N N N 个不同的完整句子(因为生成器的随机性,不可能出现相同的句子)。然后将这 N N N个句子放到判别器中得到 N N N 个不同的打分结果,对这 N N N 个打分结果取平均作为该 t o k e n token token 最终的 r e w a r d reward reward,论文中讲到当生成第 t t t 个 t o k e n token token 时:
{ Y 1 : T 1 , . . . . , Y 1 : T N } = M C G β ( Y 1 : t ; N ) \{Y_{1:T}^1,....,Y_{1:T}^N\}=MC^{G_{\beta}}(Y_{1:t};N) {Y1:T1,....,Y1:TN}=MCGβ(Y1:t;N)
上式左边表示 s a m p l e sample sample 出来的 N N N 个不同的完整句子。
综上所述:
Q D ϕ G θ ( α = y t , s = Y 1 : T − 1 ) = { 1 N ∑ n = 1 N D ϕ ( Y 1 : T n ) , Y 1 : T n ∈ M C G β ( Y 1 : t ; N ) f o r t < T D ϕ ( Y 1 : t ) f o r t = T Q_{D_\phi }^{G_\theta}(\alpha=y_t,s=Y_{1:T-1})=\left\{\begin{matrix}\frac{1}{N}\sum_{n=1}^{N}D_{\phi }(Y_{1:T}^n),Y_{1:T}^n\in MC^{G_{\beta}}(Y_{1:t};N) & for\ t
那么代码中是如何实现这一步的呢?
def get_reward(self, sess, input_x, rollout_num, discriminator):
"""
input_x: 需要打分的序列
rollout_num: 即sample的次数,即上面的N
discriminator: 判别器
"""
rewards = []
for i in range(rollout_num):
┆ # given_num between 1 to sequence_length - 1 for a part completed sentence
会遍历一整句中的每个token,给其打分
┆ for given_num in range(1, self.sequence_length ):
┆ ┆ feed = {self.x: input_x, self.given_num: given_num}
##生成一批样本,前give_num的token由input_x提供,give_num后的token由生成器补上。由此生成一批完整的句子。
┆ ┆ samples = sess.run(self.gen_x, feed)
┆ ┆ feed = {discriminator.input_x: samples, discriminator.dropout_keep_prob: 1.0}
┆ ┆ ypred_for_auc = sess.run(discriminator.ypred_for_auc, feed)##喂给判别器,给每个句子打分,作为reward
┆ ┆ ypred = np.array([item[1] for item in ypred_for_auc])
┆ ┆ if i == 0:
┆ ┆ ┆ rewards.append(ypred)
┆ ┆ else:
┆ ┆ ┆ rewards[given_num - 1] += ypred## 在rollout_num循环中,相同位置的reward相加。
┆ # the last token reward
┆ feed = {discriminator.input_x: input_x, discriminator.dropout_keep_prob: 1.0}##如果give_num已经是最后一个token了,则喂给判别器的样本就全是input_x。
┆ ypred_for_auc = sess.run(discriminator.ypred_for_auc, feed)
##注意下:ypred_for_auc只是softmax_logits,二分类的,第一个数为该样本为假样本概率,第二个数为其为真样本概率
┆ ypred = np.array([item[1] for item in ypred_for_auc])##我们拿其真样本概率作为reward
┆ if i == 0:
┆ ┆ rewards.append(ypred)
┆ else:
┆ ┆ # completed sentence reward
┆ ┆ rewards[self.sequence_length - 1] += ypred
rewards = np.transpose(np.array(rewards)) / (1.0 * rollout_num) # batch_size x seq_length##取平均值。
return rewards
通过上面的分析,我们可知,每个 t o k e n token token 的 r e w a r d reward reward 都是由判别器得到的。那么这个打分的过程是怎么做的呢?我们来看看判别器的实现代码:
不行,代码太多了,简单解说:生成器就是一个 C N N CNN CNN 网络,我们会将 i n p u t _ x input\_x input_x (二分类的) r e s h a p e reshape reshape 成一个四维的张量,然后通过各种的卷积, p o o l i n g pooling pooling 操作得到一个结果,然后再经过一个线性操作最终得到只有二维的张量,再做一个 s o f t m a x softmax softmax 操作得到 y p r e d ypred ypred 作为 r e w a r d reward reward 值等等,直接看下面精华代码:
with tf.name_scope("output"):##num_classes为2,真样本还是假样本
W = tf.Variable(tf.truncated_normal([num_filters_total, num_classes], stddev=0.1), name="W")
b = tf.Variable(tf.constant(0.1, shape=[num_classes]), name="b")
l2_loss += tf.nn.l2_loss(W)
l2_loss += tf.nn.l2_loss(b)
self.scores = tf.nn.xw_plus_b(self.h_drop, W, b, name="scores")
self.ypred_for_auc = tf.nn.softmax(self.scores)##reward
self.predictions = tf.argmax(self.scores, 1, name="predictions")
# CalculateMean cross-entropy loss
with tf.name_scope("loss"):
losses = tf.nn.softmax_cross_entropy_with_logits(logits=self.scores, labels=self.input_y)
self.loss = tf.reduce_mean(losses) + l2_reg_lambda * l2_loss
***其实就是将该整句被判别器判别为真样本的概率作为该 t o k e n token token 的 r e w a r d reward reward***,嗯,就是这么简单。判别为真样本的概率越大,则在当前步选择该 t o k e n token token 越正向。
值得一提的是:这里 r e w a r d reward reward 的方式并不唯一,论文中的对比实验就用了 b l u e blue blue 指标作为 r e w a r d reward reward 来指导生成器的训练。
好了,怎么求 r e w a r d reward reward 已经搞清楚了。
接下来再看看判别器是如何训练的?以及他的目标函数。
判别器的目标函数
简短解说:判别器是一个 C N N CNN CNN 网络,我们喂给判别器的样本是一个二分类的样本,即有生成器生成的一批假样本,也有一批真样本,然后直接做个二分类,损失函数就是一个 c r o s s _ e n t r o p y cross\_entropy cross_entropy :
m i n ϕ − E Y ∼ p d a t a [ l o g D ϕ ( Y ) ] − E Y ∼ G θ [ l o g ( 1 − D ϕ ( Y ) ) ] \underset{\phi }{min}-E_{Y\sim p_{data}}\left [ logD_{\phi } (Y)\right ]-E_{Y\sim G_{\theta}}\left [ log(1-D_{\phi }(Y)) \right ] ϕmin−EY∼pdata[logDϕ(Y)]−EY∼Gθ[log(1−Dϕ(Y))]
实现代码上面已写到。
policy Gradient
这一步有大量的数学公式需要推导。
我们由上面的分析,知道生成器的目标函数为:
J ( θ ) = E [ R T ∣ S 0 , θ ] = ∑ y 1 ∈ Y G θ ( y 1 ∣ s 0 ) ∗ Q D ϕ G θ ( s 0 , y 1 ) J(\theta) = E[R_T|S_0,\theta]=\sum_{y_1\in Y}G_{\theta}(y_1|s_0)*Q_{D_\phi }^{G_\theta}(s_0,y_1) J(θ)=E[RT∣S0,θ]=y1∈Y∑Gθ(y1∣s0)∗QDϕGθ(s0,y1)
我们再来看看上式是如何得到的:
Q G θ ( s = Y 1 : t − 1 , α = y t ) = V G θ ( Y 1 : t ) Q^{G_{\theta}}(s=Y_{1:t-1},\alpha=y_t)=V^{G_{\theta}}(Y_{1:t}) QGθ(s=Y1:t−1,α=yt)=VGθ(Y1:t)
可以这么理解:上式在 G θ G_{\theta} Gθ 为生成器时,状态为已经生成 1 1 1 到 ( t − 1 ) (t-1) (t−1) 的 t o k e n s tokens tokens 情况下,当前第 t t t 步选择 α \alpha α 的 r e w a r d reward reward 值。那么:
V G θ ( s = Y 1 : t − 1 ) = ∑ y t ∈ Y G θ ( y t ∣ Y 1 : t − 1 ) ∗ Q G θ ( Y 1 : t − 1 , y t ) = ∑ y t ∈ Y G θ ( y t ∣ Y 1 : t − 1 ) ∗ V G θ ( Y 1 : t ) V^{G_{\theta}}(s=Y_{1:t-1})=\sum_{y_t\in Y}G_{\theta}(y_t|Y_{1:t-1})*Q^{G_\theta}(Y_{1:t-1},y_t)=\sum_{y_t\in Y}G_{\theta}(y_t|Y_{1:t-1})*V^{G_{\theta}}(Y_{1:t}) VGθ(s=Y1:t−1)=yt∈Y∑Gθ(yt∣Y1:t−1)∗QGθ(Y1:t−1,yt)=yt∈Y∑Gθ(yt∣Y1:t−1)∗VGθ(Y1:t)
这样,一个完整句子的期望 r e w a r d reward reward 就可以表示成 J ( θ ) = E [ R T ∣ S 0 , θ ] = ∑ y 1 ∈ Y G θ ( y 1 ∣ s 0 ) ∗ Q D ϕ G θ ( s 0 , y 1 ) J(\theta) = E[R_T|S_0,\theta]=\sum_{y_1\in Y}G_{\theta}(y_1|s_0)*Q_{D_\phi }^{G_\theta}(s_0,y_1) J(θ)=E[RT∣S0,θ]=y1∈Y∑Gθ(y1∣s0)∗QDϕGθ(s0,y1)
那么如何 m a x i m i z e J ( θ ) maximize\ J(\theta) maximize J(θ) 呢?利用 g r a d i e n t a s c e n d gradient\ ascend gradient ascend 方法,需要对 θ \theta θ 求导。
具体求导过程就不赘述了,如有兴趣请看论文。
最后求出的结果为:


利用梯度上升法来更新生成器参数:
θ = θ + α h ▽ θ J ( θ ) \theta = \theta+\alpha_h \triangledown_{\theta}J(\theta) θ=θ+αh▽θJ(θ)
那么目标函数的优化过程在代码中如何实现呢?
self.g_loss = -tf.reduce_sum(
## self.x 为生成器生成一个序列,我们需要找到这个序列中每个token在生成器分布中的概率,然后与对应的reward相乘。求和取负作为要优化的loss
tf.reduce_sum(
┆ tf.one_hot(tf.to_int32(tf.reshape(self.x, [-1])), self.num_emb, 1.0, 0.0) * tf.log(
┆ ┆ tf.clip_by_value(tf.reshape(self.g_predictions, [-1, self.num_emb]), 1e-20, 1.0)
┆ ), 1) * tf.reshape(self.rewards, [-1])
)
g_opt = self.g_optimizer(self.learning_rate)
self.g_grad, _ = tf.clip_by_global_norm(tf.gradients(self.g_loss, self.g_params), self.grad_clip)
##更新生成器参数
self.g_updates = g_opt.apply_gradients(zip(self.g_grad, self.g_params))
在 t e n s o r f l o w tensorflow tensorflow 可以自动的反向求导,所以许多细节不需要在代码中显示。
整体算法流程

利用 M L E MLE MLE 方法 p r e t r a i n pretrain pretrain 生成器、判别器,这部分上面已经讲过。
下面稍微详细讲下 g _ s t e p 、 d _ s t e p g\_step、d\_step g_step、d_step。
G_step
- 利用生成器生成一批假样本。注意生成器每一步都是生成一个在 v o c a b vocab vocab 上的分布,我们以某种方式抽样一个 t o k e n token token 作为本步生成的 t o k e n token token。
- 在 M L E MLE MLE 作为目标函数时,我们需得到 t r u e _ d a t a true\_data true_data 中当前步的 t o k e n token token 在当前生成分布中的概率,在SeqGAN 中考虑的是当前步得到的 t o k e n token token 在生成分布中的概率以及该 t o k e n token token 的 r e w a r d reward reward,我们利用蒙特卡洛树搜索法得到每个 t o k e n token token 的 r e w a r d reward reward。
- 利用 p o l i c y g r a d i e n t policy\ gradient policy gradient 更新生成器的参数。
实现代码:
for total_batch in range(TOTAL_BATCH):
# Train the generator for one step
for it in range(1):
┆ samples = generator.generate(sess)##生成器生成一批序列
## 获得序列中每个token 的reward
┆ rewards = rollout.get_reward(sess, samples, 16, discriminator)
## 将序列与其对应的reward 喂给生成器,以policy gradient更新生成器
┆ feed = {generator.x: samples, generator.rewards: rewards}
┆ _ = sess.run(generator.g_updates, feed_dict=feed)
以上就是训练生成器的过程, 在这个阶段,判别器不发生改变只是对当前的生成情况做出反馈,也就是 r e w a r d reward reward 。
D_step
利用上面已经训完的生成器生成一批样本作为假样本,加上已有的一批真样本,作为训练数据,来训练一个二分类的判别器。
实现代码:
for _ in range(5):
generate_samples(sess, generator, BATCH_SIZE, generated_num, negative_file)
dis_data_loader.load_train_data(positive_file, negative_file)
for _ in range(3):
┆ dis_data_loader.reset_pointer()
┆ for it in xrange(dis_data_loader.num_batch):
┆ ┆ x_batch, y_batch = dis_data_loader.next_batch()
┆ ┆ feed = {
┆ ┆ ┆ discriminator.input_x: x_batch,
┆ ┆ ┆ discriminator.input_y: y_batch,
┆ ┆ ┆ discriminator.dropout_keep_prob: dis_dropout_keep_prob
┆ ┆ }
┆ ┆ _ = sess.run(discriminator.train_op, feed)
个人总结与疑点
- 如果用传统的 G A N GAN GAN 网络来做 N L P NLP NLP 的任务,那么生成器生成的序列需要喂给判别器,然后利用判别器来反向的纠正生成器,这个时候梯度的微调不再适用在离散的数据上,并且梯度在回传时可能会有一些困难。如下图:
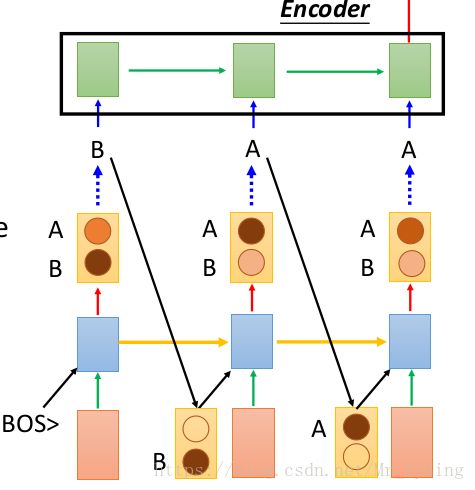
生成器是以某种方式采样生成一批数据传给判别器的,这样判别器反向将梯度回传给生成器时貌似不太好办?
而在 S e q G a n SeqGan SeqGan 中,生成器每生成一个 t o k e n token token 时,都会计算该 t o k e n token token 在生成分别中的概率,并且利用上一次训完的判别器计算出相应的 r e w a r d reward reward,这个 r e w a r d reward reward 可以理解为生成该 t o k e n token token 的权重?经过几轮的训练后, r e w a r d reward reward 越大的 t o k e n token token 越正向,越容易生成(这其实是强化学习的思想)。这里面就不需要判别器反向传梯度给生成器了。这就避免了梯度的微调导致不适用在离散的样本上?
不知道上面我个人的理解是否正确?如有想法欢迎留言讨论。
- 开头就说了传统的 s e q 2 s e q seq2seq seq2seq 方法存在 e x p o s u r e b i a s exposure\ bias exposure bias 问题,在本篇论文中,生成器只是在 p r e t r a i n pretrain pretrain 时用了 t r u e _ d a t a true\_data true_data 来做 M L E MLE MLE ,而在真正训练生成器的时候,生成器并没有用到 t r u e _ d a t a true\_data true_data,只是在判别器 中用到了 t r u e _ d a t a true\_data true_data 来训练生成器 ,训练好的生成器能得到更好、更准确的 r e w a r d reward reward。那么无论在 t r a i n train train,还是在 d e c o d e decode decode 阶段,其生成器的输入时一致的,不存在在 t r a i n train train 时用 t r a i n _ d a t a train\_data train_data 作为 d e c o d e r _ i n p u t decoder\_input decoder_input ,而在预测的时候用 p r e v i o u s _ o u t previous\_out previous_out。