关于OpenCV中常见函数用法总结
- 关于OpenCV中常见函数用法总结
- 一 一般Mat的赋值操作
- 二 求Mat中的最大值以及最小值
- 三 randn()函数给图像添加高斯噪声
- 四 mean()函数的用法
- 五 系统计时器
- 六 矩阵之间的四则运算:gemm()函数
- 七 利用OpenCV如何实现在图像指定位置处生成填充的圆形图案
- 八 将相机中的Image类型转化为Mat类型
关于OpenCV中常见函数用法总结
一 一般Mat的赋值操作
对于一般的Mat如何进行赋值,这里,只是因为经常会忘记,故而单独记录下来:
示例代码:
Mat mask=(Mat_(3,3)<<1,1,1,1,0,1,1,1,1,1);` 二 求Mat中的最大值以及最小值
示例代码:
#include通过以上代码,可以找到Mat中的最大值以及最小值。
三 randn()函数给图像添加高斯噪声
int length=600;
int width=600;
Mat Imgnoise = Mat::zeros(length, width, CV_8UC1);
int meanShiftValue = 50;
randn(Imgnoise, meanShiftValue, sigma);
Imgnoise = Imgnoise + img - meanShiftValue;说明:
此处的meanShiftValue代表的是:噪声均值。sigma:代表标准差。由于 CV_8UC1的像素值范围为(0,255),所以此处像素值不能取负数,故而 meanShiftValue取的值必须要大于0.
四 mean()函数的用法
之前一直想求一个矩阵中的所用值的均值,可是都没能成功使用mean()来取出最终结果,后来无意中使用Google搜索,成功解决了难题。
示例代码
Mat MyMat;
cv::Scalar meanValue=cv::mean(MyMat);
float MyMeanValue = meanValue.val[0];
cout<<"MyMat中的所有元素的平均值为:"<<MyMeanValue<注:对于容器,此方法也同样适用。
五 系统计时器
代码:
double t = (double)getTickCount();////开始计时
//do something......
t = ((double)getTickCount() - t) / getTickFrequency();//放在函数结尾,计算时间,单位为:秒
cout << "时间== " << t << endl;//输出时间 注:
//getTickcount函数:它返回从操作系统启动到当前所经的计时周期数
//getTickFrequency函数:返回每秒的计时周期数
六 矩阵之间的四则运算:gemm()函数
OpenCV 中计算矩阵之间的加减乘除:gemm()
调用方法:
//Tra = C2_mat - Rot*C1_mat
gemm(Rot,C1_mat,-1,C2_mat,1,Tra);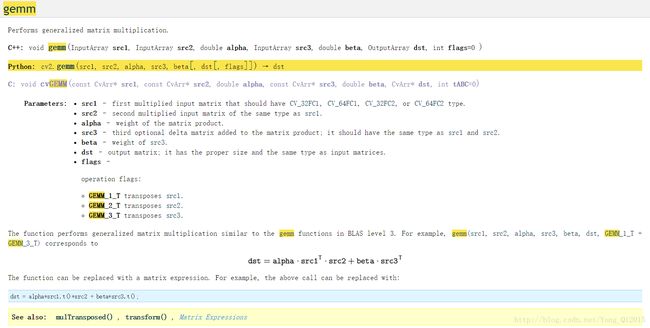
七 利用OpenCV如何实现在图像指定位置处生成填充的圆形图案
例如:如果要生成如下的图案:
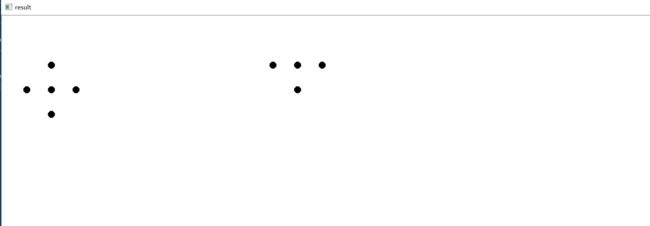
代码:
int main()
{
int radius = 7.5;
int width = 16;
Mat circle = CoreAlgorithm::**circleImg**(radius, width);
Mat image = Mat(1500, 1500, CV_8UC1, Scalar(255));
Point2i offset = Point2i(0,0);//在图像空间内平移整个特征的平移量
vector至于其中用到的两个主要函数为:
主要调用的两个函数:
//radius 圆半径,(单位像素);width,生成模板图像大小,正方形
Mat CoreAlgorithm::circleImg(int radius, int width)
{
Mat img = Mat(width, width, CV_8UC1, Scalar(255));
for (int i = 0; i < img.rows; i++)
{
for (int j = 0; jif (sqrt(pow(i - (width - 1) / 2.0, 2) + pow(j - (width - 1) / 2.0, 2))>radius)
continue;
else
img.at(i, j) = (uchar)0;
}
}
return img;
}
//////////实现将圆重复绘制在指定位置
bool copyCircleToImg(const Mat circleImg, Point2i offset, Point2i location, Mat &writeImg)
{
location.x += offset.x;
location.y += offset.y;
if (location.x - (circleImg.cols - 1) / 2.0<0 || location.y - (circleImg.rows - 1) / 2.0<0 ||
location.x + (circleImg.cols - 1) / 2.0>writeImg.cols || location.y + (circleImg.rows - 1) / 2.0>writeImg.rows)
return false;
Point2i circleImgstart = Point2i(location.x - (circleImg.cols - 1) / 2, location.y - (circleImg.rows - 1)/2);
for (int i = 0; i < circleImg.rows; i++)
{
for (int j = 0; j < circleImg.cols; j++)
{
writeImg.at(circleImgstart.y + i, circleImgstart.x + j) = circleImg.at(i, j);
}
}
return true;
} 主要的实现思想是先生成一个圆形模板,而后将圆形模板在指定位置处不断复制即可。
八 将相机中的Image类型转化为Mat类型
已知相机中Image.h中的相关属性定义为:
/**
* Construct an Image object with the specified arguments.
*
* @param rows Rows in the image.
* @param cols Columns in the image.
* @param format Pixel format.
* @param bayerFormat Format of the Bayer tiled raw image.
*/
Image(
unsigned int rows,
unsigned int cols,
PixelFormat format,
BayerTileFormat bayerFormat = NONE );
/**
* Get the number of rows in the image.
*
* @return The number of rows.
*/
virtual unsigned int GetRows() const;
/**
* Get the number of columns in the image.
*
* @return The number of columns.
*/
virtual unsigned int GetCols() const;
/**
* Get a pointer to the data associated with the image. This function
* is considered unsafe. The pointer returned could be invalidated if
* the buffer is resized or released. The pointer may also be
* invalidated if the Image object is passed to
* Camera::RetrieveBuffer(). It is recommended that a Image::DeepCopy()
* be performed if a seperate copy of the Image data is required
* for further processing.
*
* @return A pointer to the image data.
*/
virtual unsigned char* GetData();而Mat属性为:
Mat(int rows, int cols, int type, void* data, size_t step=AUTO_STEP);因而由image转化为mat的语句如下:
Image img;
cv::Mat image = cv::Mat(img.GetRows(), img.GetCols(), CV_8UC1, (void*)img.GetData()); 个人公众号:
