如何入门3D视觉?
【3D视觉工坊】星主介绍
小凡,多年从事三维视觉算法的研究,先后在知名研究院及非标自动化公司担任视觉算法工程师,曾负责立体视觉测量系统、3D相机等项目项目的研发,包括相机标定、目标跟踪、点云等,近期重点研究VSlam算法,项目包括扫地机等。
【3D视觉工坊】星球定位
由实践出发,在项目实战中构建我们的计算机视觉知识体系。希望我们都能成为一个既深谙理论,又能实操的技术达人。找到一份好工作,并非你们的最终目标,在星球中激发起对计算机视觉的真正热爱是你们来到这里的原因。
【 3D视觉工坊】知识星球已分享主题
*【T237】*OpenCV中initUndistortRectifyMap函数存在bug原因探究
*【T236】*ubuntu下对外接显示屏操作的一些简单总结
*【T235】*ubuntu下常见的一些操作指令
*【T234】*SLAM问题的数学模型
*【T233】*视觉SLAM基础知识
*【T232】*简单总结一下win10下安装Ubuntu14.04双系统的方法
*【T231】*结构光——格雷码的研究
*【230】*PCL Visualizer可视化类
*【229】*简单点云可视化
*【228】*CropHull任意多边形内部点云提取
*【227】*条件滤波、半径滤波移除离群点
*【226】*argc与argv参数解惑
*【225】*使用参数化模型投影点云
*【224】*统计滤波移除离群点(附代码)
*【223】*体素法滤波(附实现代码)
*【222】*直通滤波(附代码实现)
【T221*】*PCL工程的CMakeList文件书写范例
*【T220】*PCL中的点云滤波方案
*【T219】*Googletest测试框架搭建方法
*【T218】*点云滤波的简介
*【T217】*最终章|一分钟详解PCL编译过程
*【T216】*一分钟详解PCL-1.8.1从源码搭建开发环境四(VTK库的编译)
*【T215】*PCL-1.8.1从源码搭建开发环境三(QHULL库的编译)
*【T214】*PCL-1.8.1从源码搭建开发环境二(FLANN库的编译)
*【T213】*PCL-1.8.1从源码搭建开发环境一(Boost的编译)
*【T212】*使用DoxyWizard生成CHM文档
*【T211】*使用VA助手如何快速添加注释(按doxygen注释规范)
*【T210】*CUDA编程中extern “C” 用法解析
【T209】《工作前五年,决定你一生的财富》
*【T208】*宏定义(#define)在VS测试工程中的妙用
*【T207】*在VS中设置预编译头从而提高编译速度
*【T206】*C++ Templates The Complete Guide (第二版) 高清完整pdf版
*【T205】*对《点云库PCL学习教程》大纲简单梳理
*【T204】*模板函数编程常见的一个小错误
*【T203】*VS中生成lib与dll的工程demo
*【T202】*VS中dll以及lib生成路径设置
*【T201】*C++中typedef的简单用法总结;
*【T200】*最新的SCI-HUB访问地址
*【T199】*C++条款01:尽量以const,enum,inline替换#define
*【T198】*图像质量及质量评价
*【T197】*初代3D相机
*【T196】*VS中「后期生成事件」的用法
*【T195】*机器视觉教程与SLAM教程资源
*【T194】*文件内容的读取fscanf_s
*【T193】*文件内容的读取
*【T192】*makefiles教程
*【T191】*鸟哥的Linux私房菜基础学习
*【T190】*安利三本C++编程方面的书籍
*【T189】*QT中如何读写ini配置文件
*【T188】*关于多线程中的互斥锁
*【T177】*如何成为一流的「匠人」?
*【T176】*CUDA8.0+VS2015+Win10开发环境搭建教程
【T175】《商业的本质》
*【T174】*SLAM是什么
*【T173】*视觉SLAM入门书籍推荐
*【T172】*相机标定与手眼标定界面
*【T171】*主流的深度学习开源工具
*【T170】*一幅图简单介绍机器学习与深度学习的区别
*【T169】*关于程序的编译与链接
*【T168】*Pycharm快速汉化方法
【T167*】*EPSON机械臂通讯,实现手眼标定
*【T166】*机器|深度学习一些实用教程分享
*【T165】*善用搜索引擎:掌握site的用法
*【T164】*Top 25机器学习项目实战总结
*【T163】*深度学习入门资料
*【T162】*EPSON机器人程序控制其到达点位,简单demo
*【T161】*EPSON机器人建立TCP/IP通讯——机械手接收相机发送过来的数据,从而到达 对应位置
【T160】《赢》
*【T159】*图像复原——仅有加性噪声(二)
*【T158】*图像复原——仅有加性噪声(一)
*【T157】*噪声模型
*【T156】*图像复原——学习笔记
*【T1**55】*基于颜色的图像检索
*【T154】*基于颜色的图像分割
*【T153】*彩色图像增强
*【T152】*伪彩化
*【T151】*彩色模型
*【T150】*彩色基础
*【T149】*彩色图像处理——学习笔记
*【T148】*小波变换
*【T147】*短时傅里叶变换
*【T146】*频域滤波器的应用
*【T145】*高通滤波器、频域拉普拉斯算子
*【T144】*频域锐化滤波器
*【T143】*③高斯低通滤波器
*【T142】*②巴特沃斯低通滤波器
*【T141】*频域平滑滤波器
*【T140】*频域滤波和空域滤波关系
*【T139】*频域滤波方法
*【T138】*EPSON机器人的以太网通讯简单总结
*【T137】*EPSON机器人建立工具坐标系
*【T136】*周航的《重新理解创业
*【T135】*打印棋盘格标定板(python代码实现)
*【T134】*频域图像增强——傅里叶变换
*【T133】*频域图像增强_学习笔记
*【T132】*空域图像增强——应用
*【T131】*空域图像增强——锐化滤波器
*【T130】*空域图像增强——空域滤波
*【T129】*空域图像增强——图像间运算
*【T128】*空域图像增强——直方图处理
*【T127】*空域图像增强——灰度级变换
*【T126】*空域图像增强_学习笔记
*【T125】*双视角运动恢复结构——流程图
*【T124】*捆绑调整LM(Levenberg-Marquardt)方法_学习笔记
*【T123】*捆绑调整_学习笔记
*【T122】*3D-2D:PnP问题-PnP
*【T121】*三角量测Triangulation
*【T120】*2D-2D:对极几何——单应性矩阵
*【T119】*RANSAC方法详解
*【T118】*2D-2D:对极几何
*【T117】*针孔相机模型之再学习
*【T116】*PCL相关资料
*【T115】*特征匹配
*【T114】*二进制描述子(BRIEF)
*【T113】*基于直方图的描述子
*【T112】*特征描述子
*【T111】*快速特征检测
*【T110】*基于DoG的特征检测子(SIFT)学习笔记
*【T109】*基于LoG的特征检测子_学习笔记
*【T108】*Harris角点检测_学习笔记
*【T107】*特征点检测与匹配
*【T106】*双目视觉基础
*【T105】*基于平面特征点的位姿测量
*【T104】*相对位姿估计的基本问题(PnP)
*【T103】*为数不多的中文版深度强化学习综述
*【T102】*摄像机线性模型与非线性模型
*【T101】*视觉中常用到的几个坐标系(基础)
*【T100】*手眼标定之基本原理
*【T099】*Python深度学习+电子书+源代码
【T098】《商业的本质》里对于领导者的描述
*【T097】*直线检测(附示例代码)
*【T096】*一则父母「惊艳」到你的教育
*【T095】*459页《Python深度学习》
*【T094】*QT子对话框中的变量如何相互调用
【T093】《一百岁感言》——杨绛
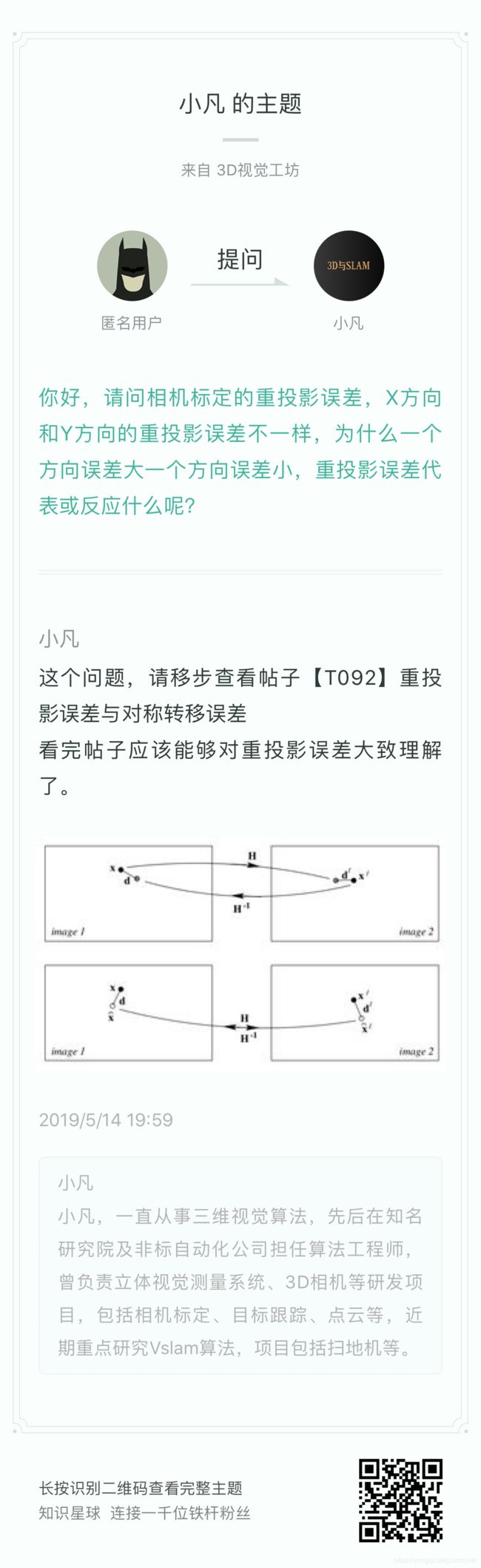
*【T092】*重投影误差与对称转移误差
*【T091】*TensorFlow学习资料
*【T090】*基于CPU的图像处理算法的SSE指令集优化
*【T089】*Visual Studio视觉编程工具(推荐4个)
*【T088】*光流估计
*【T087】*关于提问
*【T086】*通知 分享有奖 *【T085】*背景建模
*【T084】*角点检测 *【T083】*图像特征描述
*【T082】*直方图与阈值分割
*【T081】*直线检测
*【T080】*图像边缘检测
*【T079】*图像滤波及去噪
*【T078】*VS如何将核心函数封装成dll、lib,并供给第三方调用?
*【T077】*好书推荐,值得收藏
*【T076】*视觉内容的相关知识体系
*【T075】*图像/视频显示——分辨率级别
*【T074】*视频编码方式
*【T073】*模拟、数字视频传输
*【T072】*CCD传感器基本原理(灰度图)
*【T071】*颜色模型——OpenCV代码实现
*【T070】*颜色模型 *【T069】*一个概念——「辐照度」
*【T068】*一个概念——「光通量」
【T067】「好奇号」火星探测车
*【T066】*机器视觉系统
*【T065】*视觉系统构成要素
*【T064】*一日三问
*【T063】*再谈「相机标定」
*【T062】*善用朋友圈
*【T061】*计算机视觉基本原理——RANSAC
*【T060】*一分钟详解「本质矩阵」推导过程
*【T059】*C++多线程
*【T058】*共勉 学习不像吃快餐,需要细嚼慢咽。
*【T057】*彩色图像处理
*【T056】*形态学处理
*【T055】*图像复原
*【T054】*图像频域处理与小波初步
*【T053】*图像空域处理
*【T052】*图像处理与计算机视觉基础总结
*【T051】*QT中如何显示调试界面
*【T050】*VS2015 Visual Assistant X破解版安装教程
*【T049】*Google C++ 编程规范
*【T048】*安利几本计算机视觉中很棒的参考书,可以收藏
*【T047】*对极几何与基本矩阵(补充)
*【T046】*相机几何模型与对极几何
*【T045】*数字图像概论与基础
*【T044】*安利一些基于图像三维建模方面的文献,感兴趣者可以收藏。
*【T043】*安利两本关于图像三维建模方面的书籍,感兴趣者可以收藏
*【T042】*安利一款好用的界面布局软件:mockplus
*【T041】*俞敏洪最新演讲:在一个动荡的时代,做不动荡的自己。
*【T040】*机器学习的基本问题 (二 机器学习的对象与分类)
*【T039】*机器学习的基本问题 (一 机器学习的特点)&&什么是机器学习?
*【T038】*关于成熟 *【T037】*Python IDE ——Anaconda+PyCharm的安装与配置
【T036】 Homography matrix(单应性矩阵)在广告投放中的实践(补充篇)
*【T035】*一分钟详解Homography matrix(单应性矩阵)
*【T034】*福利:课件——基于图像的三维建模
*【T033】*一张图解释「立体视觉中极限几何约束的几个基本概念」
*【T032】*机器人的手眼标定
【T031】「计算机视觉」与「机器视觉」两个术语的联系与区别
*【T030】*读书心得:「要想成功,就必须弄清基础问题」——亚里士多德
*【T029】*初入阿里——10天
*【T028】*真正决定你人生高度的,是深度学习能力。
*【T027】*3D技术综述
*【T026】*机器学习与深度学习,电子书福利
*【T02**5】*主动双目立体视觉 (附原论文)
【T024】《OpenCV3编程入门》知识大纲整理
*【T023】*安利一款好用的绘制流程图大纲的软件:Edraw Max
*【T022】*关于每次使用不同的标定结果(投影仪与相机构成的立体视觉),为什么三维 重建一个平面,整体的数据会「飘」,会有微移?
*【T021】*一分钟详解OpenCV之相机标定calibrateCamera() (下篇)
*【T020】*一分钟详解OpenCV之相机标定calibrateCamera() (中篇)
*【T019】*一分钟详解OpenCV之相机标定calibrateCamera() (上篇)
*【T019】*透过《任正非传》,解读任正非与李一男之江湖恩怨
*【T018】*真正拉开人生差距的,不是能力!而是“指数型思维”
*【T017】*机器视觉设计者如何选择合适的镜头
*【T016】*相机与投影仪标定
*【T015】*printf和cout的比较
*【T014】*OpenCV实战经典书籍
*【T013】*Python3.x入门教程
*【T012】*从零开始学习「张氏标定法」
*【T011】*职场高效率:用印象笔记来提升你的工作效率
*【T010】*格雷码的编码与解码(附实现代码)
*【T009】*每天都精力充沛,做事效率很高,他是怎么做到的?
【T008】《跃迁——成为高手的技术》读书笔记(下)
【T007】《跃迁——成为高手的技术》读书笔记(上)
*【T006】*关于棋盘格的一点疑惑
*【T005】*精确绘制椭圆
*【T004】*文献资源下载经验总结
*【T003】*星球的宗旨
*【T002】*星球的主要交流话题
*【T001】*建立星球的出发点
关于【3D视觉工坊】知识星球:
重点关注:
1、3D视觉技术;
2、图像处理技术;
3、技术干货与代码分享。
4、Vslam算法(接下来的重点任务)
活动价:89元/人(原价129元)
截止日期:6月1日晚12点。
邀请有赏:邀请好友加入,每成功一次可获得星球定价的30%收益。
加入方式:扫码或者点击阅读原文点击加入即可。
你可能不信,优秀的人总是会在一起
附:星球中提问demo展示如下。