频域处理:傅里叶变换及小波变换
频域处理:傅里叶变换及小波变换
- 引言
- 1、傅里叶变换
- 2、小波变换
- 3、程序
引言
图像处理–>频域处理–>傅里叶变换、小波变换。用另一种方法来观察世界的话,你会发现世界是永恒不变的。
1、傅里叶变换
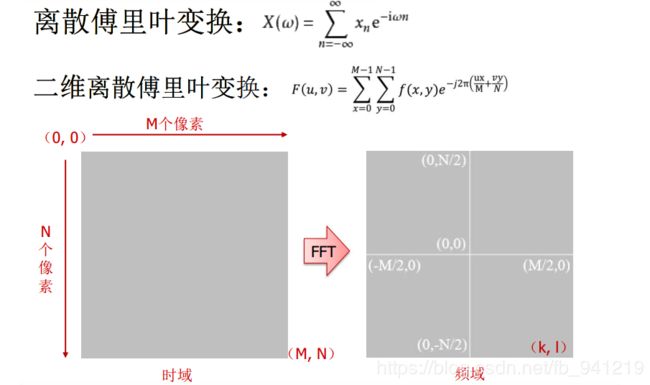
傅里叶变换
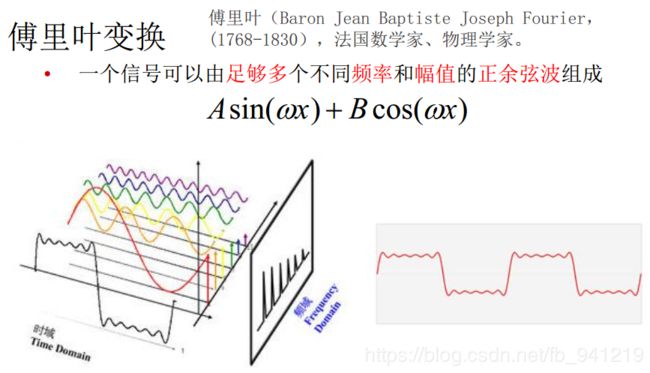
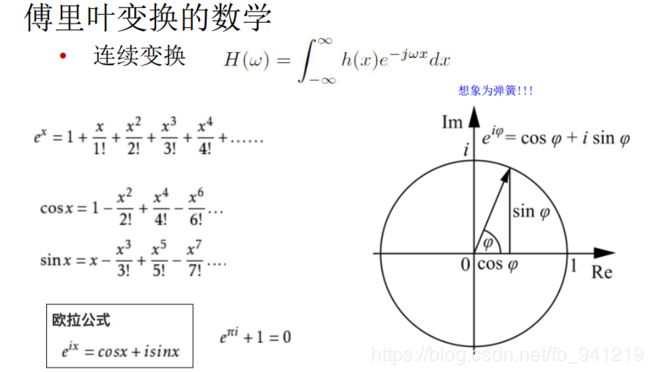
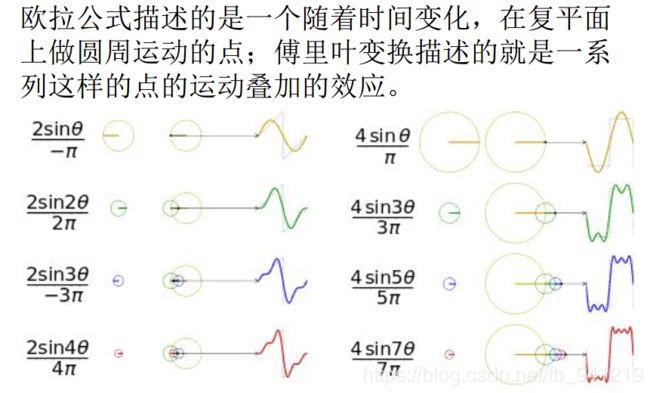
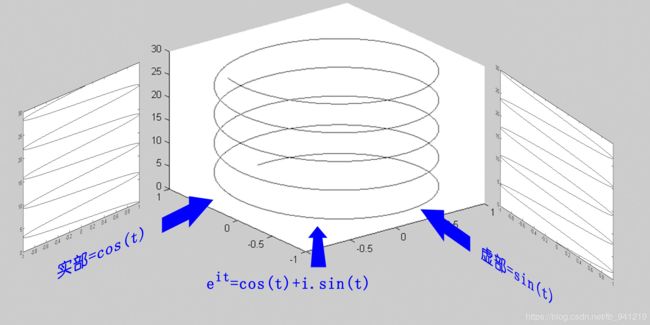
欧拉公式所描绘的,是一个随着时间变化,在复平面上做圆周运动的点,随着时间的改变,在时间轴上就成了一条螺旋线。如果只看它的实数部分,也就是螺旋线在左侧的投影,就是一个最基础的余弦函数。而右侧的投影则是一个正弦函数。
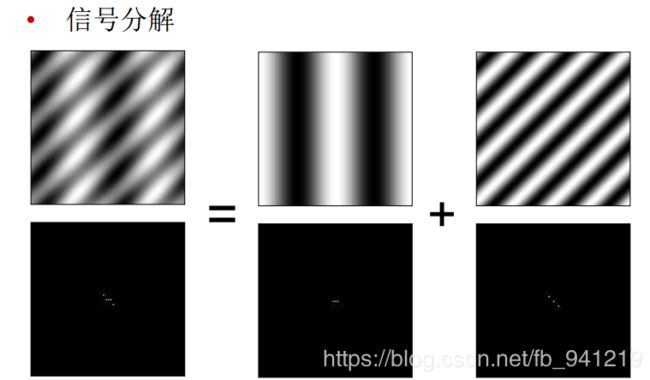
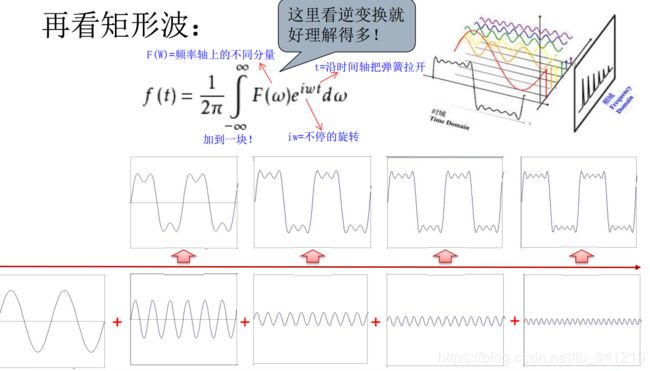
由欧拉公式知道:正弦波的叠加,也可以理解为螺旋线的叠加在实数空间的投影。而螺旋线的叠加:
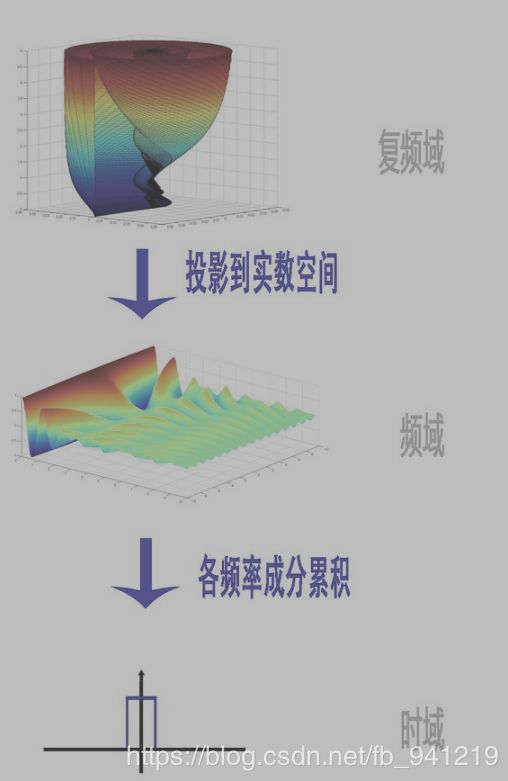
复数就是一个能把平面进行均匀缩放和旋转的乘子。
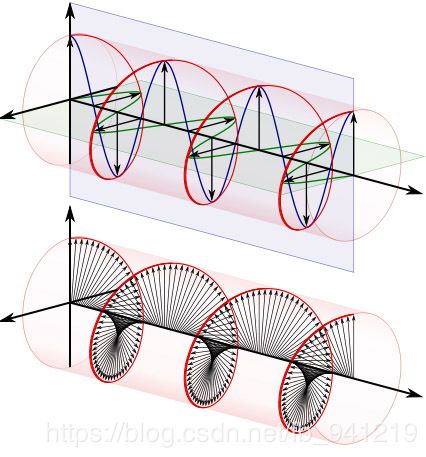
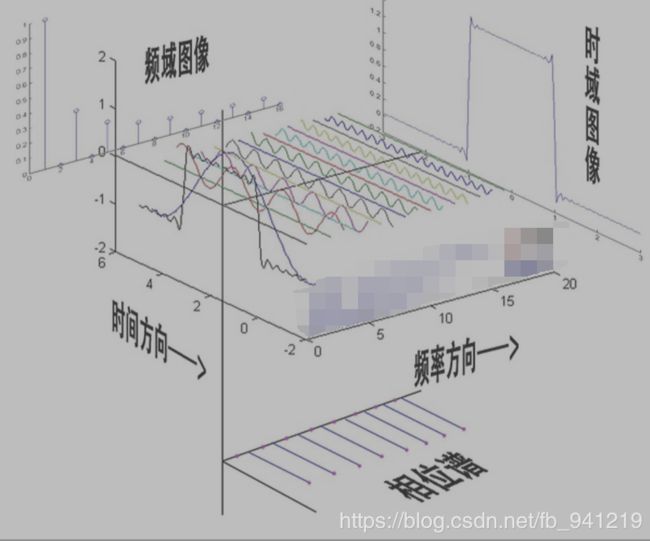
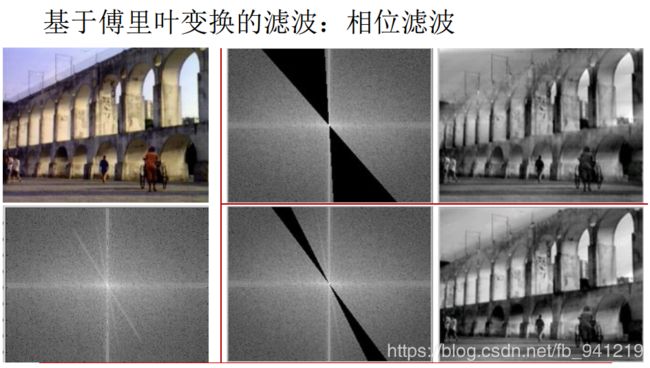
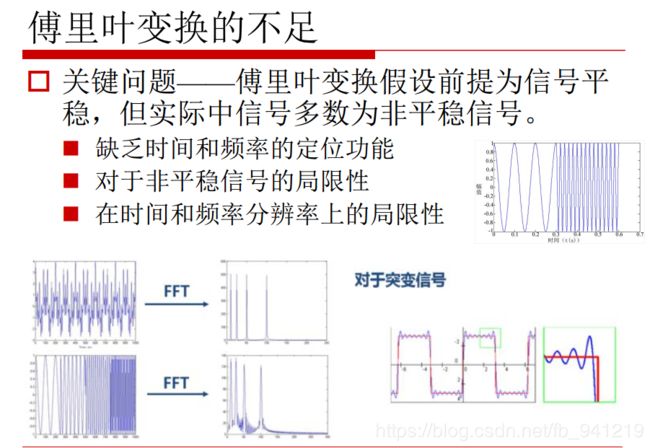
通过时域到频域的变换,得到了一个从侧面看的频谱,但是这个频谱并没有包含时域中全部的信息。因为频谱只代表每一个对应的正弦波的振幅是多少,而没有提到相位。基础的正弦波A.sin(wt+θ)中,振幅,频率,相位缺一不可,不同相位决定了波的位置,所以对于频域分析,仅仅有频谱(振幅谱)是不够的,还需要一个相位谱。
纠正一个概念:时间差并不是相位差。如果将全部周期看作2Pi或者360度的话,相位差则是时间差在一个周期中所占的比例。我们将时间差除周期再乘2Pi,就得到了相位差。
在完整的立体图中,将投影得到的时间差依次除以所在频率的周期,就得到了最下面的相位谱。所以,频谱是从侧面看,相位谱是从下面看。
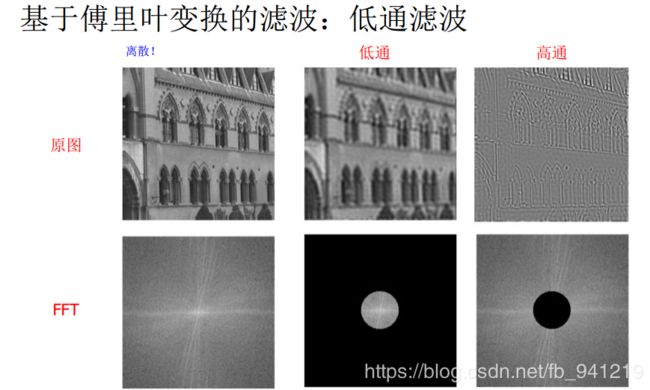
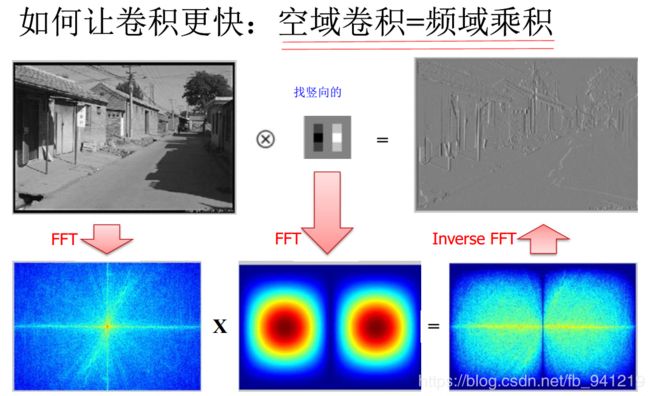
频 率 内 低 外 高 , 图 二 只 留 下 中 间 部 分 也 就 是 中 间 部 分 也 就 是 主 体 部 分 , 细 节 部 分 去 除 ; 高 通 相 反 。 频率内低外高,图二只留下中间部分也就是中间部分也就是主体部分,细节部分去除;高通相反。 频率内低外高,图二只留下中间部分也就是中间部分也就是主体部分,细节部分去除;高通相反。
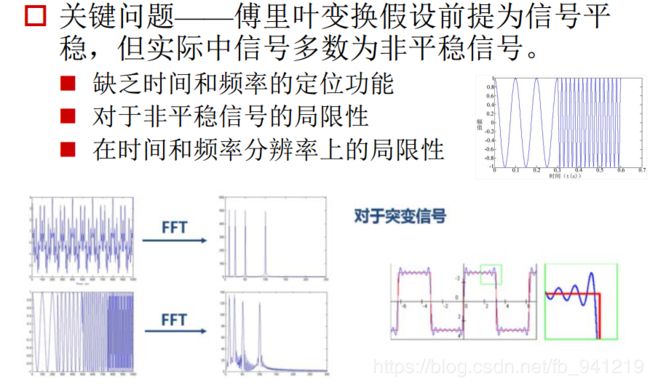
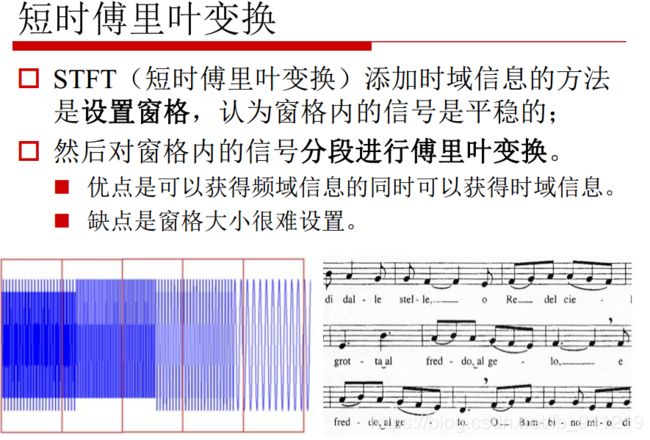
短时傅立叶变换(Short-time Fourier Transform,STFT)也叫加窗傅立叶变换,顾名思义,就是因为傅立叶变换的时域太长了,所以要弄短一点,这样就有了局部性。
定义:把整个时域过程分解成无数个等长的小过程,每个小过程近似平稳,再傅里叶变换,就知道在哪个时间点上出现了什么频率了。”这就是短时傅里叶变换。
时域上分成一段一段做FFT,就可以知道频率成分随着时间的变化情况。
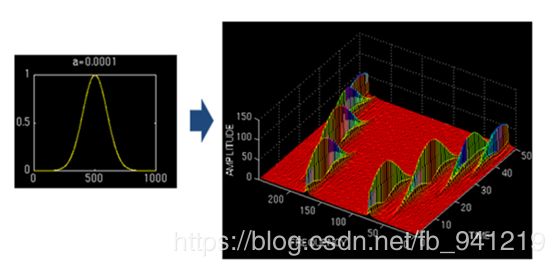
时 频 图 时频图 时频图
2、小波变换
小波变换
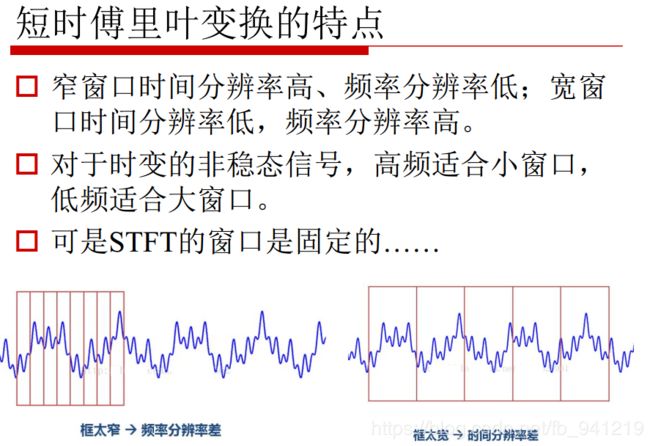
对于加窗傅立叶变换让人头疼的就是窗口的大小问题,如果让窗口的大小可以改变,就完美了。小波就是基于这个思路,但是不同的是。STFT是给信号加窗,分段做FFT;而小波变换并没有采用窗的思想,更没有做傅里叶变换。小波直接把傅里叶变换的基给换了——将无限长的三角函数基换成了有限长的会衰减的小波基。这样不仅能够获取频率,还可以定位到时间。即是做傅里叶变换只能得到一个频谱,做小波变换却可以得到一个时频谱。
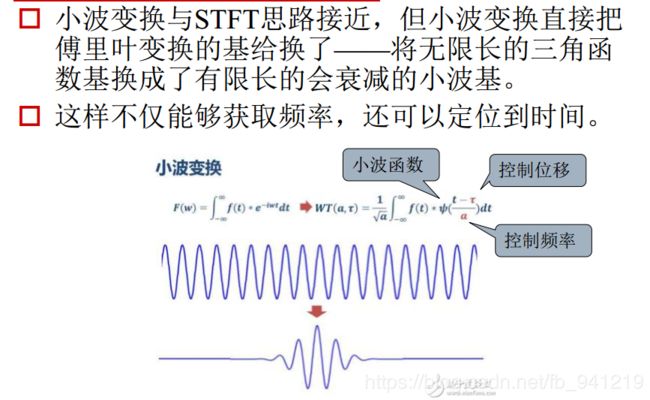
从公式可以看出,不同于傅里叶变换,变量只有频率ω,小波变换有两个变量:尺度a(scale)和平移量 τ(translation)。尺度a控制小波函数的伸缩,平移量 τ控制小波函数的平移。尺度就对应于频率(反比),平移量 τ就对应于时间。
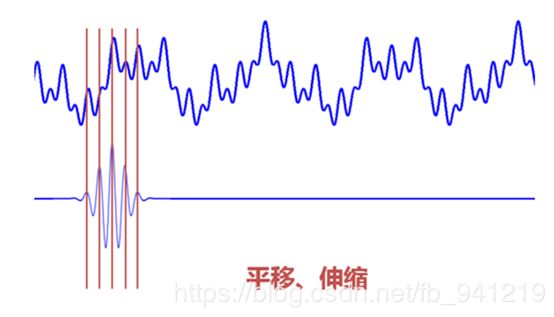
当伸缩、平移到这么一种重合情况时,也会相乘得到一个大的值。这时候和傅里叶变换不同的是,这不仅可以知道信号有这样频率的成分,而且知道它在时域上存在的具体位置。而当每个尺度下都平移着和信号乘过一遍后,就知道信号在每个位置都包含哪些频率成分,就可以对非稳定信号做时频分析。
3、程序
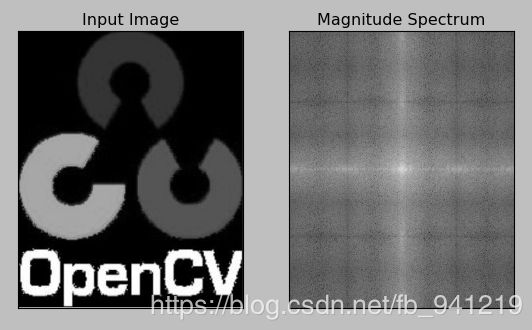
fft:
import cv2 as cv
import numpy as np
from matplotlib import pyplot as plt
img = cv.imread('./opencv.png',0)
f = np.fft.fft2(img)
fshift = np.fft.fftshift(f)
magnitude_spectrum = 20*np.log(np.abs(fshift))
plt.subplot(121),plt.imshow(img, cmap = 'gray')
plt.title('Input Image'), plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(magnitude_spectrum, cmap = 'gray')
plt.title('Magnitude Spectrum'), plt.xticks([]), plt.yticks([])
plt.show()
opencv+dft
#include
#include
#include
#include
using namespace std;
using namespace cv;
int main()
{
Mat I = imread("lena.jpg", IMREAD_GRAYSCALE); //读入图像灰度图
//判断图像是否加载成功
if (I.empty())
{
cout << "图像加载失败!" << endl;
return -1;
}
else
cout << "图像加载成功!" << endl << endl;
Mat padded; //以0填充输入图像矩阵
int m = getOptimalDFTSize(I.rows);
int n = getOptimalDFTSize(I.cols);
//填充输入图像I,输入矩阵为padded,上方和左方不做填充处理
copyMakeBorder(I, padded, 0, m - I.rows, 0, n - I.cols, BORDER_CONSTANT, Scalar::all(0));
Mat planes[] = { Mat_(padded), Mat::zeros(padded.size(),CV_32F) };
Mat complexI;
merge(planes, 2, complexI); //将planes融合合并成一个多通道数组complexI
dft(complexI, complexI); //进行傅里叶变换
//计算幅值,转换到对数尺度(logarithmic scale)
//=> log(1 + sqrt(Re(DFT(I))^2 + Im(DFT(I))^2))
split(complexI, planes); //planes[0] = Re(DFT(I),planes[1] = Im(DFT(I))
//即planes[0]为实部,planes[1]为虚部
magnitude(planes[0], planes[1], planes[0]); //planes[0] = magnitude
Mat magI = planes[0];
magI += Scalar::all(1);
log(magI, magI); //转换到对数尺度(logarithmic scale)
//如果有奇数行或列,则对频谱进行裁剪
magI = magI(Rect(0, 0, magI.cols&-2, magI.rows&-2));
//重新排列傅里叶图像中的象限,使得原点位于图像中心
int cx = magI.cols / 2;
int cy = magI.rows / 2;
Mat q0(magI, Rect(0, 0, cx, cy)); //左上角图像划定ROI区域
Mat q1(magI, Rect(cx, 0, cx, cy)); //右上角图像
Mat q2(magI, Rect(0, cy, cx, cy)); //左下角图像
Mat q3(magI, Rect(cx, cy, cx, cy)); //右下角图像
//变换左上角和右下角象限
Mat tmp;
q0.copyTo(tmp);
q3.copyTo(q0);
tmp.copyTo(q3);
//变换右上角和左下角象限
q1.copyTo(tmp);
q2.copyTo(q1);
tmp.copyTo(q2);
//归一化处理,用0-1之间的浮点数将矩阵变换为可视的图像格式
normalize(magI, magI, 0, 1, CV_MINMAX);
imshow("输入图像", I);
imshow("频谱图", magI);
waitKey(0);
return 0;
}
小波 变换.