Hough圆检测的matlab实现
源代码:
m文件1:
function newPic=hough_circle_main(oldPic)
close all
clear
clc
[filename,pathname]=uigetfile({'*.bmp;*.jpg;*.tif;*.gif'},'newpic');
if isequal(filename,0)
disp('User selected cancel')
else
disp(['User selected: ',fullfile(pathname,filename)])
end
root=fullfile(pathname,filename);
oldPic=imread(root);
I=oldPic;
% close all
% clear
% clc
%
% I=imread('circle.bmp');
[m,n,k] = size(I);
if k>1
I = rgb2gray(I);
end
BW = edge(I,'sobel');
step_r = 10;
step_angle = 0.1;% 5.7296 degrees
minr = 100; %need to modify by fact
maxr = 200; %need to modify by fact
thresh = 0.5; % 76.8000
[hough_space,hough_circle,para] = hough_Circle(BW,step_r,step_angle,minr,maxr,thresh);
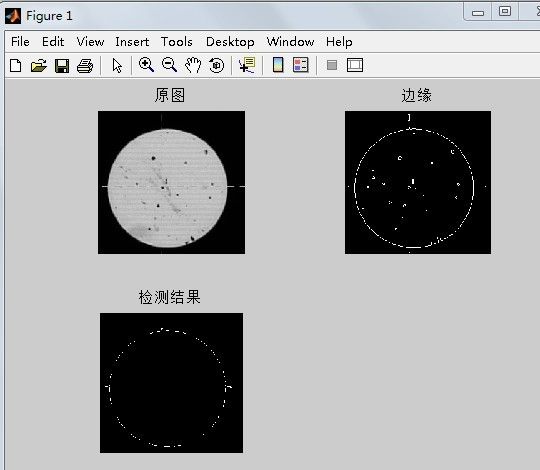
subplot(221),imshow(I),title('原图')
subplot(222),imshow(BW),title('边缘')
subplot(223),imshow(hough_circle),title('检测结果')
M文件2:
function [hough_space,hough_circle,para] = hough_Circle(BW,step_r,step_angle,r_min,r_max,p)
% %%%%%%%%%%%%%%%%%%%%%%%%%%
% input
% BW:二值图像;
% step_r:检测的圆半径步长
% step_angle:角度步长,单位为弧度
% r_min:最小圆半径
% r_max:最大圆半径
% p:以p*hough_space的最大值为阈值,p取0,1之间的数
% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% output
% hough_space:参数空间,h(a,b,r)表示圆心在(a,b)半径为r的圆上的点数
% hough_circl:二值图像,检测到的圆
% para:检测到的圆的圆心、半径
[m,n] = size(BW);
size_r = round((r_max-r_min)/step_r)+1;
size_angle = round(2*pi/step_angle);
hough_space = zeros(m,n,size_r);
[rows,cols] = find(BW);
ecount = size(rows);
% Hough变换
% 将图像空间(x,y)对应到参数空间(a,b,r)
% a = x-r*cos(angle)
% b = y-r*sin(angle)
for i=1:ecount
for r=1:size_r
for k=1:size_angle
a = round(rows(i)-(r_min+(r-1)*step_r)*cos(k*step_angle));
b = round(cols(i)-(r_min+(r-1)*step_r)*sin(k*step_angle));
if(a>0&a<=m&b>0&b<=n)
hough_space(a,b,r) = hough_space(a,b,r)+1;
end
end
end
end
% 搜索超过阈值的聚集点
max_para = max(max(max(hough_space)));
index = find(hough_space>=max_para*p);
length = size(index);
hough_circle=zeros(m,n);
for i=1:ecount
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;
if((rows(i)-par1)^2+(cols(i)-par2)^2<(r_min+(par3-1)*step_r)^2+5&...
(rows(i)-par1)^2+(cols(i)-par2)^2>(r_min+(par3-1)*step_r)^2-5)
hough_circle(rows(i),cols(i)) = 1;
end
end
end
% 打印结果
for k=1:length
par3 = floor(index(k)/(m*n))+1;
par2 = floor((index(k)-(par3-1)*(m*n))/m)+1;
par1 = index(k)-(par3-1)*(m*n)-(par2-1)*m;
par3 = r_min+(par3-1)*step_r;
fprintf(1,'k=%d Center (%d,%d) radius %d\n',k,par2,par1,par3);
para(:,k) = [par1,par2,par3];
end
end