Opencv3笔记33——亚像素级角点检测
1.概述
我们处理图像的目的不是提取用于识别的特征点而是进行几何测量,需要更高的精度。函数goodFeaturesToTrack()只能提供简单的像素坐标,但是有的时候实数坐标值。
亚像素级角点检测的位置在摄像机标定,跟踪并重建摄像机的轨迹,或者重建跟踪目标的三维结构时,是一个基本的测量值。
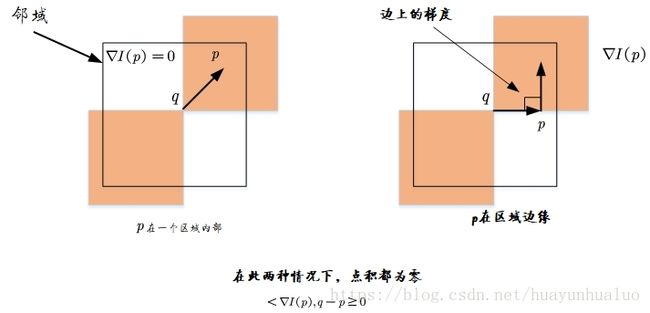
一个向量和与其正交的向量的点积为0.
其中(a)点p附近的图像时均匀的,其梯度为0。(b)边缘的梯度与沿边缘方向的q-p向量正交。在图中的两种情况下,p点梯度与q-p向量的点积均为0
我们假设起始角点q在实际亚像素角点的附近。检测所有的q-p向量。若点p位于一个均匀的区域,则点p处的梯度为0。若q-p向量的所有方向与边缘的方向一致,则此边缘上p点处的梯度与q-p向量正交,在这两种情况下,p点处的梯度与q-p向量的点积为0.我们可以在p点周围找到很多组梯度以及相关的向量q-p,其点集为0,然后通过求解方程组,求出亚像素级精度的位置。
Opencv为我们提供了cornerSubPix()函数,用于发现亚像素精度的角点位置
2.寻找亚像素角点:cornerSubPix()函数
cornerSubpix()函数用于寻找亚像素角点位置。
void cornerSubPiix(InputArray image, InputOutputArray corners,Size winSize, Size zeroZone, TermCriteria criteria)- 第二个参数:InputOutputArray类型的corners,提供输入角点的初始坐标和明确的输出坐标
- 第三个参数:Size类型的winSize,搜索窗口的一半尺寸。若winSize = Size(5,5),表示使用(5*2+1) × × (5*2+1)即 11×11 11 × 11 大小的搜索窗口
- 第四个参数:Size类型的zeroZone,表示死区的一半尺寸。死区为部队搜索区域内的中央位置做求和运算的区域,用来避免自相关矩阵出现的某些可能的奇异性。
- 第五个参数:TermCriteria类型的criteria,求角点的迭代的终止条件。
#include