【分析】Ceph编程实例 接口Librbd(C++) -- 映像创建与数据读写
目前我们有两种路径使用Ceph的块存储:
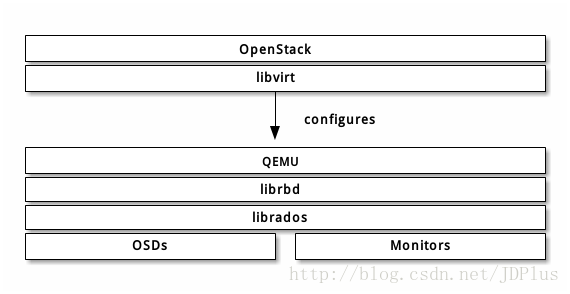
- 利用QEMU/KVM通过librbd与 Ceph 块设备交互,主要为虚拟机提供块存储设备,如下图所示;
- 利用kernel module与Host kernel交互,主要为物理机提供块设备支持。
Librbd 是Ceph提供的块存储接口的抽象,它提供C/C++、Python等多种接口。对于C++,最主要的两个类就是RBD 和 Image。 RBD 主要负责创建、删除、克隆映像等操作,而Image 类负责映像的读写等操作。
准备工作
对于任何客户端应用,都需要首先连接到一个运行良好的Ceph集群。
获取集群句柄
//声明Rados对象,并初始化
librados::Rados rados;
ret = rados.init("admin"); // just use the client.admin keyring
if (ret < 0) { // let's handle any error that might have come back
std::cerr << "couldn't initialize rados! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "we just set up a rados cluster object" << std::endl;
}
//获取配置文件信息: /etc/ceph/ceph.conf
// 1. 根据命令行参数
/*
ret = rados.conf_parse_argv(argc, argv);
if (ret < 0) {
// This really can't happen, but we need to check to be a good citizen.
std::cerr << "failed to parse config options! error " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "we just parsed our config options" << std::endl;
// We also want to apply the config file if the user specified
// one, and conf_parse_argv won't do that for us.
for (int i = 0; i < argc; ++i) {
if ((strcmp(argv[i], "-c") == 0) || (strcmp(argv[i], "--conf") == 0)) {
ret = rados.conf_read_file(argv[i+1]);
if (ret < 0) {
// This could fail if the config file is malformed, but it'd be hard.
std::cerr << "failed to parse config file " << argv[i+1]
<< "! error" << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
}
break;
}
}
}
*/
// 2. 程序里面指定
ret = rados.conf_read_file("/etc/ceph/ceph.conf");
if (ret < 0) {
// This could fail if the config file is malformed, but it'd be hard.
std::cerr << "failed to parse config file! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
}连接集群
ret = rados.connect();
if (ret < 0) {
std::cerr << "couldn't connect to cluster! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "we just connected to the rados cluster" << std::endl;
}创建I/O上下文环境
如果没有存储池,需要先新建一个存储池。
新建存储池
const char *pool_name = "gnar";
ret = rados.pool_create(pool_name);
if (ret < 0) {
std::cerr << "couldn't create pool! error " << ret << std::endl;
ret = EXIT_FAILURE;
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "we just created a new pool named " << pool_name << std::endl;
}新建I/O上下文环境
librados::IoCtx io_ctx; //I/O上下文
const char *pool_name = "gnar";
ret = rados.ioctx_create(pool_name, io_ctx);
if (ret < 0) {
std::cerr << "couldn't setup ioctx! err " << ret << std::endl;
ret = EXIT_FAILURE;
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "we just created an ioctx for our pool" << std::endl;
}若干RBD映像API
声明RBD对象,创建rbd映像
librbd::RBD rbd;
const char *image_name = "rumboo";
uint64_t init_size = (uint64_t) 200 * 1024 * 1024; //映像初始化大小200MB
uint64_t features = 1; //影响feature个数
int order = 22; //默认值为22, 即4MB (1 << 22)
ret = rbd.create2(io_ctx, image_name, init_size, features, &order);
if (ret < 0) {
std::cerr << "couldn't create rbd image! err " << ret << std::endl;
ret = EXIT_FAILURE;
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "We just created an rbd image" << std::endl;
}打开rbd映像
librbd::RBD rbd;
const char *image_name = "rumboo";
librbd::Image image;
ret = rbd.open(io_ctx, image, image_name);
if (ret < 0) {
std::cerr << "couldn't open rbd image! err " << ret << std::endl;
ret = EXIT_FAILURE;
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "We just opened an rbd image" << std::endl;
}查看映像大小
uint64_t size = 0;
ret = image.size(&size);
if (ret < 0) {
std::cerr << "couldn't get image size! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "The size of the image is " << size << std::endl;
}调整映像大小
size = (uint64_t) 500 * 1024 * 1024; //调整映像大小500MB
ret = image.resize(size);
if (ret < 0) {
std::cerr << "couldn't change the size of the image! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "We just change the size of the image" << std::endl;
}查看映像ID
std::string id;
ret = image.get_id(&id);
if (ret < 0) {
std::cerr << "couldn't get image ID! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "The ID of the image is " << id << std::endl;
}查看映像features
features = 0;
ret = image.features(&features);
if (ret < 0) {
std::cerr << "couldn't get image features! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "The features of the image are " << features << std::endl;
}查看映像状态信息
librbd::image_info_t info;
ret = image.stat(info, sizeof(info));
if (ret < 0) {
std::cerr << "couldn't get image stat_info! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "info.size is " << info.size << std::endl;
std::cout << "info.obj_size is " << info.obj_size << std::endl;
std::cout << "info.num_objs is " << info.num_objs << std::endl;
std::cout << "info.order is " << info.order << std::endl;
std::cout << "info.block_name_prefix is " << info.block_name_prefix << std::endl;
}查看存储池ID
std::cout << "data pool id is " << image.get_data_pool_id() << std::endl;- 1
查看block_name_prefix
std::cout << "block name prefix is " << image.get_block_name_prefix() << std::endl;查看flags
uint64_t flags = 0;
ret = image.get_flags(&flags);
if (ret < 0) {
std::cerr << "couldn't get image flags! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "image flags is " << flags << std::endl;
}查看条带化参数
std::cout << "image stripe unit is " << image.get_stripe_unit() << std::endl;
std::cout << "image stripe count is " << image.get_stripe_count() << std::endl;RBD映像数据读写
数据读写 – synchronous
uint64_t ofs_w = (uint64_t) 0; //读写偏移量
uint64_t ofs_r = (uint64_t) 0;
size_t len_w = 100; //读写长度
size_t len_r = 100;
ceph::bufferlist bl_w; //读写bufferlist
ceph::bufferlist bl_r;
const char *fn_i = "input"; //读写文件名
const char *fn_o = "output";
std::string error;
ret = bl_r.read_file(fn_i, &error);
std::cout << "read file ret = " << ret << std::endl;
if (ret < 0) {
std::cerr << "couldn't read file! err " << ret << std::endl;
ret = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "We just read a file" << std::endl;
}
ssize_t ret_w = image.write2(ofs_w, len_w, bl_r, 0);
ssize_t ret_r = image.read2(ofs_r, len_r, bl_w, 0);
ret = bl_w.write_file(fn_o, 0644);
std::cout << "write file ret = " << ret << std::endl;
if (ret < 0) {
std::cerr << "couldn't write file! err " << ret << std::endl;
ret = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "We just wrote a file" << std::endl;
}数据读写 – asynchronous
std::string data = "foo";
uint64_t ofs_aiow = (uint64_t) 100; //读写偏移量
uint64_t ofs_aior = (uint64_t) 100;
size_t len_aiow = 600; //读写长度
size_t len_aior = 600;
ceph::bufferlist bl_aiow; //读写bufferlist
ceph::bufferlist bl_aior;
librbd::RBD::AioCompletion *write_completion = new librbd::RBD::AioCompletion(
NULL, (librbd::callback_t) simple_write_cb); //读写AioCompletion
librbd::RBD::AioCompletion *read_completion = new librbd::RBD::AioCompletion(
NULL, (librbd::callback_t) simple_read_cb);
for (int i = 0; i < 200; ++i) {
bl_aior.append(data);
}
std::cout << bl_aior.to_str() << std::endl;
ret = image.aio_write2(ofs_aiow, len_aiow, bl_aior, write_completion, 0);
if (ret < 0) {
std::cerr << "couldn't start write! error " << ret << std::endl;
ret = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
}
write_completion->wait_for_complete(); //等待写完成
ret_w = write_completion->get_return_value();
if (ret_w < 0) {
std::cerr << "couldn't write! error " << ret << std::endl;
ret_w = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "we just write data successfully, return value is " << ret_w << std::endl;
}
ret = image.aio_read2(ofs_aior, len_aior, bl_aiow, read_completion, 0);
if (ret < 0) {
std::cerr << "couldn't start read! error " << ret << std::endl;
ret = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
}
read_completion->wait_for_complete(); //等待读完成
ret_r = read_completion->get_return_value();
if (ret_r < 0) {
std::cerr << "couldn't read! error " << ret << std::endl;
ret_r = EXIT_FAILURE;
image.close(); //关闭rbd映像
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_FAILURE;
} else {
std::cout << "we just read data successfully, return value is " << ret_r << std::endl;
}
std::cout << bl_aiow.to_str() << std::endl;
write_completion->release();
read_completion->release();
void simple_write_cb(librbd::completion_t cb, void *arg) {
std::cout << "write completion cb called!" << std::endl;
}
//简单的回调函数,用于librbd::RBD::AioCompletion
void simple_read_cb(librbd::completion_t cb, void *arg) {
std::cout << "read completion cb called!" << std::endl;
}收尾工作
在最后,一定不能忘记关闭rbd映像、I/O上下文,断开集群连接。
ret = image.close(); //关闭rbd映像
if (ret < 0) {
std::cerr << "couldn't close rbd image! err " << ret << std::endl;
ret = EXIT_FAILURE;
return EXIT_FAILURE;
} else {
std::cout << "we just closed an rbd image" << std::endl;
}
io_ctx.close(); //关闭I/O上下文
rados.shutdown(); //断开集群连接
return EXIT_SUCCESS;
摘自http://blog.csdn.net/jdplus/article/details/76522298
摘自
http://blog.csdn.net/jdplus/article/details/76522298