利用Steger算法提取激光中心线的亚像素坐标(Matlab)
最近一直在做线结构光扫描三维成像方面的内容,采用结构光进行扫描检测时,需要提取激光条纹的中心线,我利用Steger算法提取激光中心线的亚像素坐标,在Matlab 2018b 软件上运行。
联系方式:QQ:936874728
邮箱:[email protected]
[email protected]
欢迎读者指正错误,希望和大家一起交流线结构光扫描三维成像相关的内容
下面先介绍一下steger算法的运行思路:(借鉴的别人的总结,直接截图白嫖过来了)
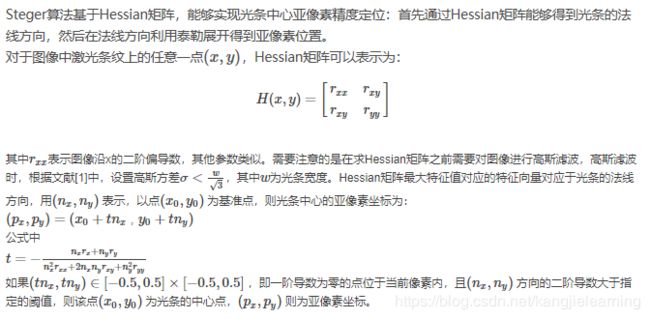
根据算法思路,我们
①输入图像
②图像处理
③利用高斯模板与图像卷积构造hessian矩阵
④求解hessian的特征值得到光条的法线方向
⑤法线方向泰勒展开获得亚像素位置
⑥选择合适的像素点,此时获得的是像素坐标(x0,y0),和对应的(tnx,tny)相加获得亚像素坐标。
根据上述思路编写matlab代码:(代码主题是嫖的网上的开源码,然后结合自己需要进行的修改)。
①Steger:
linePixel = steger(EinRDR)
%采用steger算法提取光条中心
im = double(EinRDR);
im = im/max(im(:)); %%归一化
bw=im2bw(im, 0.4); %%二值化
bw = bwmorph(bw, 'clean', 1); % 去孤立点
[x0,y0]=find(bw==1); %%找到白点坐标
sigma=25/sqrt(3);%求Hessian矩阵之前需要对图像进行高斯滤波,高斯滤波时,设置高斯方差σ<(w/√3),w是光条宽度
[Dx,Dy,Dxx,Dxy,Dyy] = Hessian2D(im,sigma);
[eigenvalue1, eigenvalue2, eigenvectorx, eigenvectory]=eig2image(Dxx, Dxy, Dyy);
%eigenvectorx,eigenvectory:Hessian矩阵最大特征值对应的特征向量对应于光条的法线方向
t = -(Dx.*eigenvectorx + Dy .* eigenvectory) ./...
(Dxx .* eigenvectorx.^2 + 2*Dxy.*eigenvectorx.*eigenvectory + Dyy.*eigenvectory.^2 );
px = t.*eigenvectorx;
py = t.*eigenvectory;
[candidateX1, candidateY1] = find(px >= -0.5 & px <= 0.5 & py >= -0.5 & py <= 0.5 & bw==1);
%判断:如果(px,py)∈[?0.5,0.5]×[?0.5,0.5]
%即一阶导数为零的点位于当前像素内,
%且(nx,ny)方向的二阶导数大于指定的阈值,
%则该点(candidataX1,candidataY1)为光条的中心点,candidataX1+px,candidataY1+py 则为亚像素坐标。
linePixel_t = [candidateX1, candidateY1];
for i=1:size(candidateX1,1)
m1=candidateX1(i,1);
n1=candidateY1(i,1);
px1(i,1)=px(m1,n1);
py1(i,1)=py(m1,n1);
x1(i,1)=m1+px(m1,n1);
x2(i,1)=py(m1,n1)+n1;
end
linePixel = [x1,x2];
%获得激光线像素数点坐标
end②构造hessian矩阵
利用高斯模板和图像卷积获得
图像沿x,y方向上的二阶导数
```c
function [Dx,Dy,Dxx,Dxy,Dyy] = Hessian2D(I,Sigma)
%构造高斯模板
if nargin < 2, Sigma = 1; end
[X,Y] = ndgrid(-round(3*Sigma):round(3*Sigma));
DGaussx = 1/(2*pi*Sigma^4)*(-X).* exp(-(X.^2 + Y.^2)/(2*Sigma^2));
DGaussy = 1/(2*pi*Sigma^4)*(-Y).* exp(-(X.^2 + Y.^2)/(2*Sigma^2));
DGaussxx = 1/(2*pi*Sigma^4) * (X.^2/Sigma^2 - 1) .* exp(-(X.^2 + Y.^2)/(2*Sigma^2));
DGaussxy = 1/(2*pi*Sigma^6) * (X .* Y) .* exp(-(X.^2 + Y.^2)/(2*Sigma^2));
DGaussyy = DGaussxx';
%卷积
Dx = imfilter(I,DGaussx,'conv');
Dy = imfilter(I,DGaussy,'conv');
Dxx = imfilter(I,DGaussxx,'conv');
Dxy = imfilter(I,DGaussxy,'conv');
Dyy = imfilter(I,DGaussyy,'conv');
end
③计算黑森矩阵的特征值
function [Lambda1,Lambda2,Ix,Iy]=eig2image(Dxx,Dxy,Dyy)
tmp = sqrt((Dxx - Dyy).^2 + 4*Dxy.^2);
v2x = 2*Dxy; v2y = Dyy - Dxx + tmp;
% Normalize
%标准化
mag = sqrt(v2x.^2 + v2y.^2); i = (mag ~= 0);
v2x(i) = v2x(i)./mag(i);
v2y(i) = v2y(i)./mag(i);
% The eigenvectors are orthogonal
%实对称矩阵性质:不同特征值对应的特征向量是正交的
v1x = -v2y;
v1y = v2x;
% Compute the eigenvalues
%计算特征值
mu1 = 0.5*(Dxx + Dyy + tmp);
mu2 = 0.5*(Dxx + Dyy - tmp);
% Sort eigen values by absolute value abs(Lambda1)<abs(Lambda2)
%按绝对值abs(Lambda1)<abs(Lambda2)对特征值排序
check=abs(mu1)>abs(mu2);
Lambda1=mu1; Lambda1(check)=mu2(check);
Lambda2=mu2; Lambda2(check)=mu1(check);
Ix=v1x; Ix(check)=v2x(check);
Iy=v1y; Iy(check)=v2y(check);
end附上程序所需的图片:
我也不知道什么原因,可能网页原因或者我的网络原因吧,原图没传上去。。。。下面截图,大小发生了变化,读者还原过程时需要重新选择感兴趣区域,,,

试验结果:


部分坐标值:

可能叙述和代码还有些许问题,请大家加以指正,目前在做线结构光扫描三维成像相关的内容,有相关课题的可以加好友讨论。
QQ:936874728
邮箱:[email protected]
[email protected]
Steger读取图像