基于stm32与l298n的直流电机pwm调速(二)
在上一博文中说了直流电机驱动板的电路原理,现在具体说一下直流电机的调速原理以及代码实现,亲测调速有效。
首先说一下接线,l298n可以控制两路直流电机,在这里仅测试一路,看一下l298n的控制逻辑以及芯片引脚。
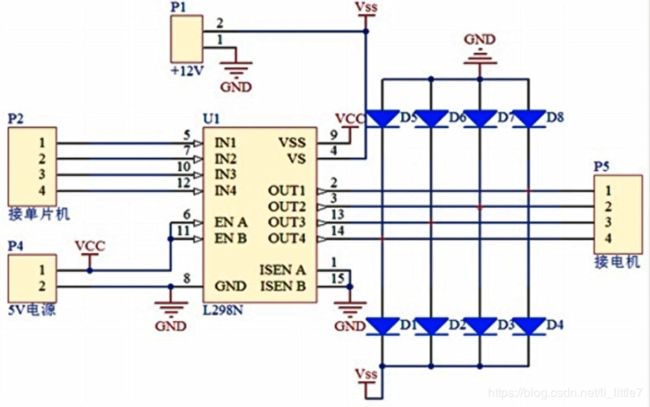
所用到的就是IN1-4,两个使能ENA和ENB,然后OUT1-4。看一下其控制逻辑

使能信号ENA高电平有效,然后逻辑信号IN1和IN2一起控制正反转和刹车。利用stm32进行控制并实现调速,只需要输出两个逻辑信号和一个pwm信号即可。这里采用其通用定时器3的通道2输出pwm,在开发板上对应引脚为pa7,逻辑信号利用pa4和pa5输出。那么,具体接线就简单了,接线图如下:
具体接线描述:L298N的out1和out2接电机的正负极,IN1和IN2分别对应开发板的PA4和PA5,12V电源接入L298N的12V供电和GND,然后将开发板的gnd和l298n的gnd连接(一定要共地)接线完工。
具体代码分析首先要进行gpio口和时钟的初始化,代码利用按键中断来输出不同的pwm波形,所以还需要进行中断初始化,最后主函数循环等待即可。
首先gpio初始化,利用GPIOA的4/5/7,4/5输出高低电平,设置成推挽输出即可,7输出pwm,需要设置为复用推挽。具体代码如下:
GPIO_InitTypeDef GPIO_InitStructure;//定义数组
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIO外设时钟
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形 GPIOA.7
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //LED0-->PB.4 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOB.4
GPIO_ResetBits(GPIOA,GPIO_Pin_4); //Pa.4 输出低
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //LED0-->PB.5 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOB.5
GPIO_ResetBits(GPIOA,GPIO_Pin_5); //Pa.5 输出低
接下来继续初始化通用定时器3通道2的相关设置
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义两个数组作为初始化入口参数
TIM_OCInitTypeDef TIM_OCInitStructure;
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM3 Channel2 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM3 OC2
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIM3在CCR2上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIM3
然后利用按键中断输出不同的pwm或者逻辑,代码中给定固定的pwm,不同的逻辑,分别控制前后转和刹车,具体代码如下:
u16 pwm=350;
//外部中断0服务程序
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
KEY_Init(); // 按键端口初始化,此函数在这里不做讲解,具体代码可通过百度云下载
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //使能复用功能时钟
//GPIOE.2 中断线以及中断初始化配置 下降沿触发
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource2);
EXTI_InitStructure.EXTI_Line=EXTI_Line2; //KEY2
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
//GPIOE.3 中断线以及中断初始化配置 下降沿触发 //KEY1
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);
EXTI_InitStructure.EXTI_Line=EXTI_Line3;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
//GPIOE.4 中断线以及中断初始化配置 下降沿触发 //KEY0
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource4);
EXTI_InitStructure.EXTI_Line=EXTI_Line4;
EXTI_Init(&EXTI_InitStructure); //根据EXTI_InitStruct中指定的参数初始化外设EXTI寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI2_IRQn; //使能按键KEY0所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2,
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x02; //子优先级2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn; //使能按键KEY1所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x01; //子优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; //使能按键KEY2所在的外部中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02; //抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x00; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //使能外部中断通道
NVIC_Init(&NVIC_InitStructure); //根据NVIC_InitStruct中指定的参数初始化外设NVIC寄存器
}
//外部中断2服务程序
void EXTI2_IRQHandler(void)
{
delay_ms(10);//消抖
if(KEY2==0) //按键KEY2
{
TIM_SetCompare2(TIM3,pwm);
GPIO_SetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5); //前进
}
EXTI_ClearITPendingBit(EXTI_Line2); //清除LINE2上的中断标志位
}
//外部中断3服务程序
void EXTI3_IRQHandler(void)
{
delay_ms(10);//消抖
if(KEY1==0) //按键KEY1
{
TIM_SetCompare2(TIM3,pwm);
GPIO_SetBits(GPIOA,GPIO_Pin_5);
GPIO_ResetBits(GPIOA,GPIO_Pin_4); //后退
}
EXTI_ClearITPendingBit(EXTI_Line3); //清除LINE3上的中断标志位
}
//外部中断4服务程序
void EXTI4_IRQHandler(void)
{
delay_ms(10);//消抖
if(KEY0==0) //按键KEY0
{
TIM_SetCompare2(TIM3,0);
GPIO_ResetBits(GPIOA,GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5); //刹车
}
EXTI_ClearITPendingBit(EXTI_Line4); //清除LINE4上的中断标志位
}
最后是主函数,一直等待中断到来即可:
int main(void)
{
delay_init();//延迟初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断分组
EXTIX_Init();//中断初始化
TIM3_PWM_Init(450,7199); //设置频率为72000000/(7199+1)=10khz,然后比较寄存器设置为450
//循环等待
while(1)
{
delay_ms(500);
}
}
代码下载连接代码百度云下载