关于B树的学习总结和B+树,B*树的简介
概念
B树,英文是B-tree,是一种平衡多路树,这个不叫B减树,就是B树。
B树是一种多路树。因为他的子节点不止2个,可以是多个。
B树是一种平衡树。所谓平衡树,指的是他的左右两个子树的高度差小于等于1,而且左右子树的子树高度差也小于等于1。其实B树算是一种特殊的平衡树,因为B树的要求更高,要求左右子树高度相同,也就是说,根节点到每个叶子节点的距离都相同。
约定
1,ceil(x),这是一个向上取整的函数,比如ceil(1.1)=2。注意这不是四舍五入,而且是得到比参数大的那个整数。
2,B树可以用阶数来定义,阶数代表了B树的节点最多可以拥有的子节点数,后面用m来代表B树的阶数。
一个m阶B树的特性
1,除了叶子节点外,树中每个节点,最少有ceil(m/2)个子节点,最多有m个子节点。
2,只要根节点不是叶子节点(那种情况只能是整个树就一个根节点),那么根节点最少有2个子节点。
3,所有叶子节点出现在同一层,即根节点到所有子节点的距离相同。
4,除了根节点之外,树中每个节点最少有ceil(m/2)-1个关键字,最多有m-1个关键字。
5,假设一个节点中有x个关键字(K1,K2,……Kx),那么需要满足以下条件:
- 有x+1个子节点(P0,P1,……Px)。
- 节点中的x个关键字升序排列,即K(n-1)
- 子节点Pn中的元素都小于Kn,都大于K(n-1),也就是说,节点和子节点中的关键字排序是P0,K1,P1,K2,P2,……Kx,Px。
比如下面的树:
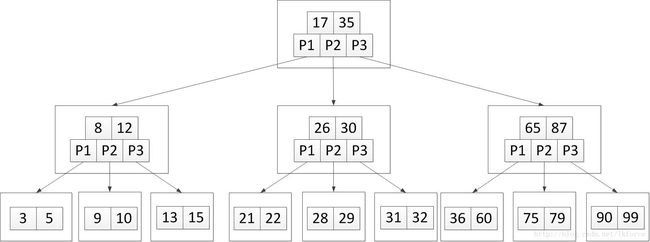
每个方框是一个节点
节点中的数字是关键字
Pn是指向子节点的指针
最上面是根节点,最下面是叶子节点,叶子节点没有指向子节点的指针
B树的查找
在上面的B树中,比如我们要找关键字32
1,比较根节点,32大于第一个关键字17,小于第二个关键字35,那么查找17和35之间的指针(P2)指向的节点(26和30那个)。
2,子节点中有关键字26和30,目标关键字32大于30,那么查找大于30的那个指针(P3)指向的节点(31和32那个)。
3,找到的子节点中有关键字31和32,在这个节点中可以找到目标关键字32。
向B树中添加关键字
向一棵m阶B树中添加关键字时,需要考虑节点中的关键字数是否超过了上限。
m阶B树每个节点最多有m-1个关键字。
如果节点在添加完关键字之后(排好序),关键字数已经达到了m,该节点将分裂成两个节点。
节点分裂的方式是,最中间的关键字向上移到父节点,大于和小于中间关键字的部分分别成为两个新的节点。可以看到,节点分裂的时候父节点得到了一个新的关键字,如果分裂前父节点关键字树已经饱和了(m-1个),会导致父节点也分裂,在最坏的情况下,分裂会一直进行到根节点,根节点一分裂,整个树的高度都会加一。
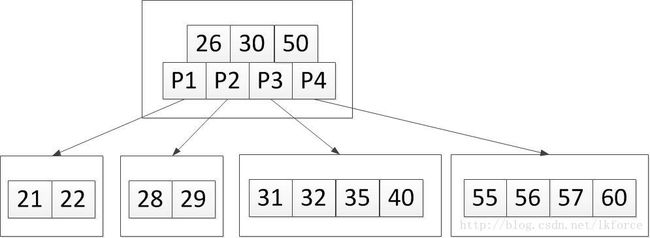
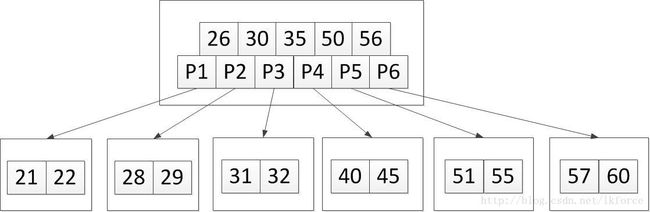
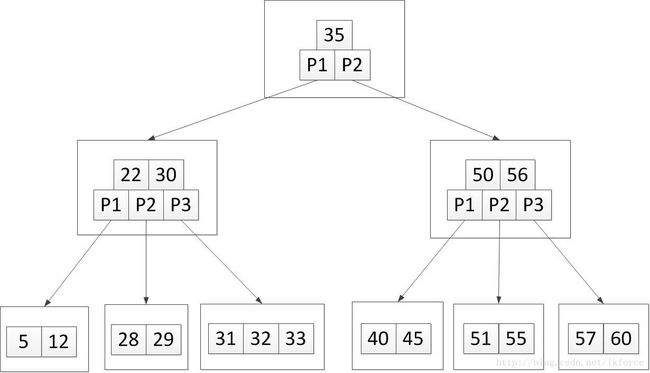
举个例子,以下五阶B树:
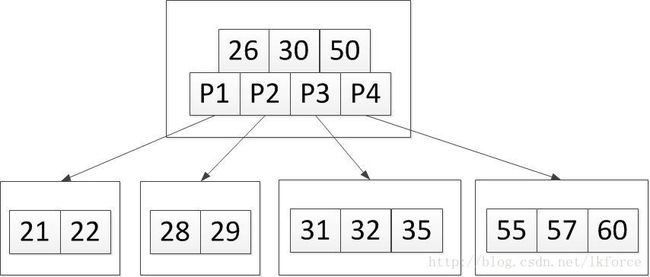
1,加入关键字40。可以很快定位到加入元素的位置是第三个叶子节点,加完之后树变成了这样:
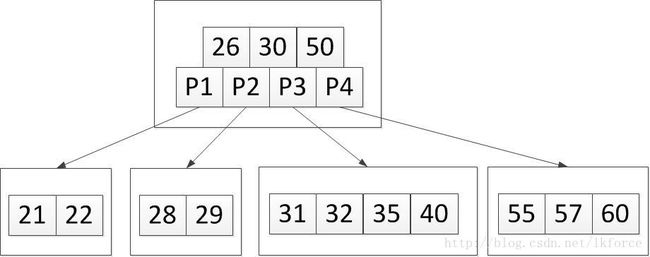
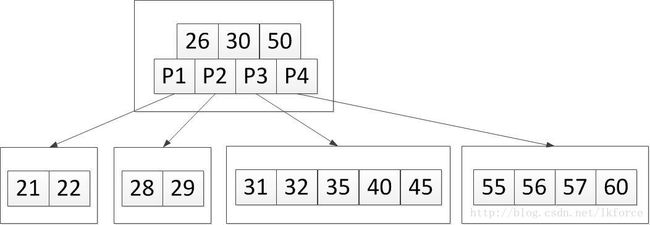
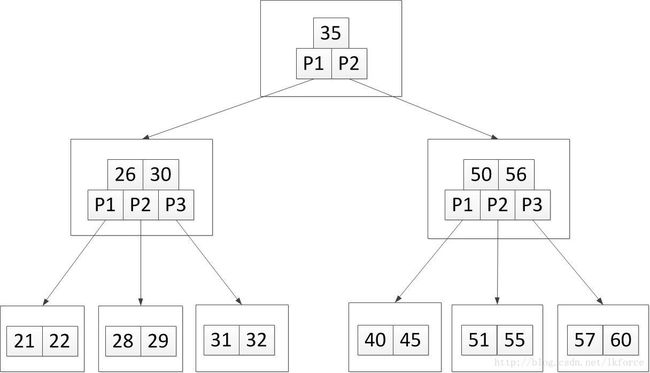
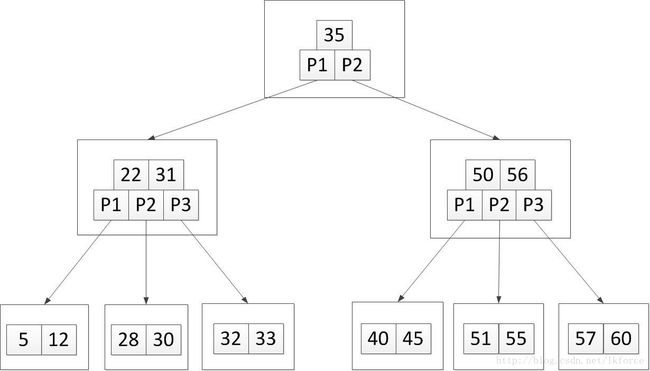
2,加入关键字56。定位到新增关键字的位置,第四个叶子节点,加完之后树变成这样:
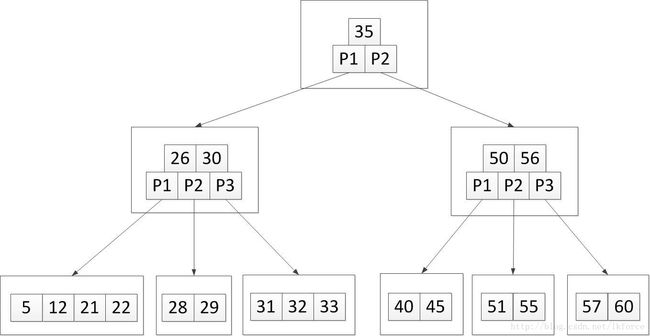
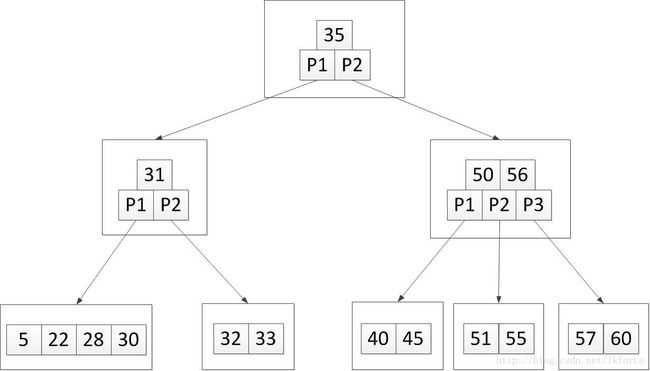
3, 加入关键字45。应该添加到第三个叶子节点,加完之后树变成这样:
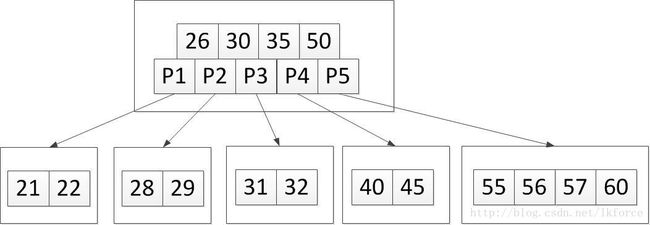
还没完,5阶B树每个节点最多4个关键字,这样第三个叶子节点关键字超上限了,需要分裂。中间关键字35上升到父元素,因为35是从P3的节点来的,所以35在父节点中的位置就在小于P3的关键字30和大于P3的关键字50之间。叶子节点中小于35的关键字(31和32)组成新节点,大于35的关键字(40和45)组成新节点,然后树变成这样:
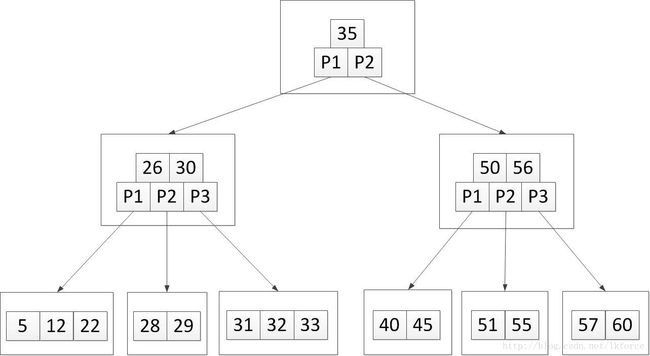
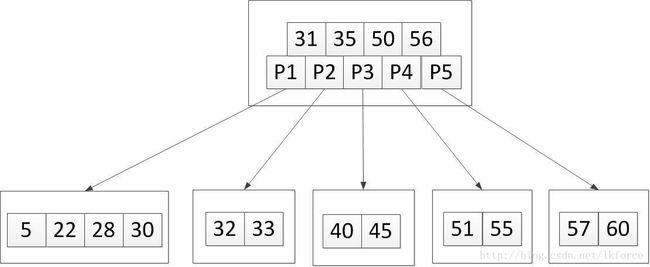
4, 加入关键字51。应该添加到第5个叶子节点,加完是这样:
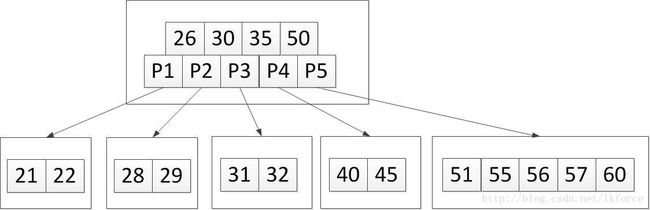
第五个叶子节点关键字数超上限,分裂之后中间元素56上移到父元素,变成这样:
父节点得到了关键字56之后,关键字数也超上限了,也需要分裂,中间关键字35上移,大于和小于35的关键字分别形成新的节点,P3和P4指针的位置其实还是不变的,最终树变成这样:
整个树增加了一层。
从B树中删除关键字
从B树的节点中删除关键字时,需要考虑删除之后节点的关键字数量是否小于下限。
m阶B树的节点最少包含ceil(m/2)-1个关键字。
如果删除之后节点中的关键字小于下限,则需要从子树中获取关键字,或从相邻兄弟节点获取关键字,或和相邻兄弟节点合并。如果从子树获取关键字之后子树依然能保持B树的基本要求,则可以从子树中获取,否则看相邻兄弟节点元素是否富余,富余的话可以从兄弟节点获取元素,相邻兄弟节点也不富余就需要和兄弟节点合并。
从相邻兄弟节点获取关键字时,当然不是把兄弟节点的关键字直接拿过来,而是把当前节点和兄弟节点之间的那个父节点关键字拿过来,然后兄弟节点给父节点补一个关键字。
和兄弟节点合并时,需要把当前节点和兄弟节点之间的那个父节点关键字下移,然后和该节点还有兄弟节点组成新的节点,基于B树节点关键字的数量要求,这样合并出来的新节点关键字数不会超上限。这种方式在极端情况下可能会导致根节点下移合并,也就是树的层数会减少1层。
举个例子,以下五阶B树:
1,删除关键字21。最普通的情况,第一个叶子节点删除21之后,剩余关键字数量3,不需要变动,删完了变成这样:
2,删除关键字26。删除26之后节点只剩下了30一个关键字,已经不满足B树的要求,可以从子节点中获取关键字。在这个例子中只能从第一个叶子节点中获取,把叶子节点中最接近被删除关键字的元素22移到父节点,删完了是这样:
3,删除关键字29。节点删除29之后关键字只剩下了28,已经低于下限,没有子节点可以获取关键字,考虑从相邻兄弟节点获取。第一个叶子节点已经处于下限,只能从第三个叶子节点获取关键字。步骤如下:把第二叶子节点和第三叶子节点之间的父元素关键字30移到第二叶子节点,然后第三叶子节点把距离30最近的关键字31补给父节点,移完之后树是这样的:
4,删除关键字12。删除12之后第一叶子节点就只剩下了5,低于下限。在这个例子中该节点没有子节点,也不能从相邻兄弟节点中获取关键字(兄弟节点只有28和30两个关键字,不能再减少),所以只能和相邻兄弟节点合并。合并的步骤如下:把第一叶子节点和第二叶子节点之间的父节点关键字22下移,然后和第一叶子节点和第二叶子节点组成新的节点,合并完成之后的树是这样的:
此时父节点只有一个关键字31,小于下限,和直接删除该节点的关键字不同,无法再从子节点中获取关键字,在这个例子中也无法从相邻的兄弟节点获取,只能考虑和相邻兄弟节点合并,合并步骤:父节点关键字35下移,和两个子节点组成新的节点,这个节点实际上成为了根节点,整个树的高度减少了1,合并完的结果如下:
最基本的删除例子就是这样,实际上在层数比较多的情况下,删除操作可能会更复杂一些。
关于B+树
B+树是由B树变来的,B+树和B树有这样的区别:
1,B+树的非叶子节点不记录数据本身,只记录引用的连接。基于此特点,B+树在非叶子节点的文件会非常小。叶子节点会包含所有的关键字。
2,B+树每个叶子节点都有指向相邻的下一个兄弟叶子节点的指针。基于此特点,B+树在范围查询上的效率比B树高了很多。
3,这条区别是有争议的,有人说B+树的节点中关键字和子节点个数相同,也有人说B+树和B树一样关键字比子节点少一个。
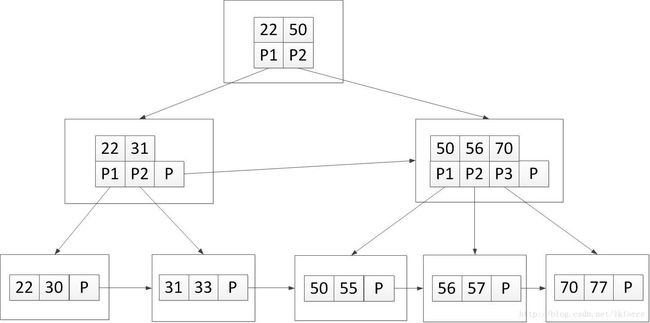
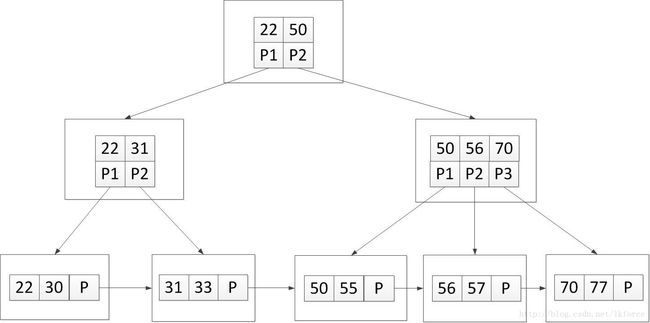
如果我们认为上述第三条中关键字和子节点个数是相同的,那B+树就是这样的:
向B+树中添加关键字时,也存在节点分裂的情况,在节点分裂时,会生成一个新的节点,把原节点中一半的元素复制到新节点,在父节点中添加指向新节点的关键字和指针。
关于B*树
B*树是由B+树变化来的,在B+树的基础上,B*树的非叶子节点也有指向下一个兄弟节点的指针。
B*树要求每个节点至少有2/3m个关键字,比B+树的空间利用率高。
B*树在添加关键字时也存在分裂的问题,在节点分裂时,可能会移动一部分关键字到兄弟节点中,然后在原节点中添加关键字并修改父节点的关键字和指针。如果兄弟节点已满,则新建一个节点,把原节点和兄弟节点各移1/3关键字到新建节点,然后对应修改父节点。B*树的新增关键字时的效率比B+树要低。
以下是一个B*树的例子: