Kwp2000协议的应用(程序后续篇)
作者:良知犹存
转载授权以及围观:欢迎添加微信:becom_me
总述
接上上篇文章Kwp2000协议的应用(硬件原理使用篇),本篇继续对基于PID解析数据,如何依据J1979的标准进行解析数据
先给昨天的文章补上一张故障码对照表,昨天分析了如何读取故障码,但是如何把16bit的hex数据转为我们可以解释的故障码,一般各大厂家的维修手册会有显示,第二就是ECU的协议手册里面会进行描述故障码对应的hex数据。
下面就是部分故障码展示:

四、继续读取ECU常用数据

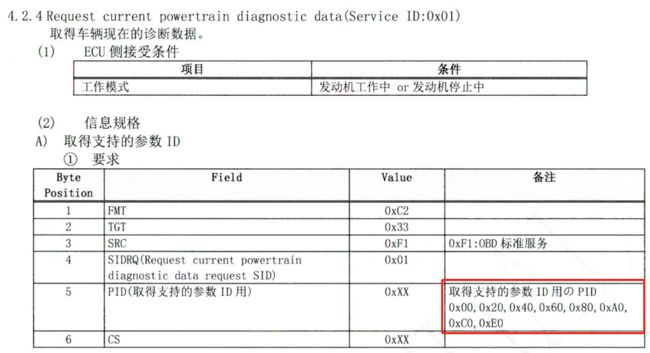
通过服务ID:0x01 读取整车状态数据:
从上面可以看到支持的整车的数据的ID 有0x20 0x40 0xC0打头的整段ID
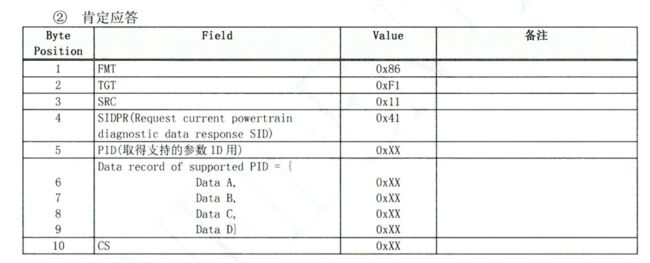
或者我们也可以通过向ECU发送相应格式的数据,用来解析能够支持的PID有哪些。
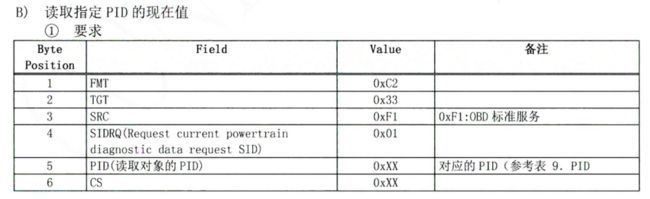
TEST->ECU (设备端发往ECU请求读取转速的数据)hex:C2 33 F1 01 0C F3
读取代码如下:仅供参考
__packed typedef struct{u8 fmt;u8 tgt;u8 src;u8 sid;}KlineSend;u8 KLineReadrpm(void)/*读发动机转速*/{KLIN_RecOK = 0;u8* p1;KlineSend *p = (KlineSend*)malloc(20);p->fmt = 0xC2;p->tgt = 0x33;p->src = 0xF1;p->sid = 0x01;p1=(u8*)&(p->sid);*++p1= 0x0C;*++p1=CheckSum((u8*)p, sizeof(KlineSend)+1);SendBuf_KLin((u8*)p, sizeof(KlineSend)+2);free(p);return 0;}
ECU ->TEST (ECU 应答设备转速的回复)德尔福hex ::C4 F1 11 41 0C 0000 13
BOSH ECU回应数据格式 hex:C4 F1 11 41 0C 0000 13
虽然数据内容有些不同,但是都是符合kwp2000的数据格式,这样对我们来说我们只需要把握数据整体是否能用,再解析关键字即可,不需要一种ECU写一套代码。
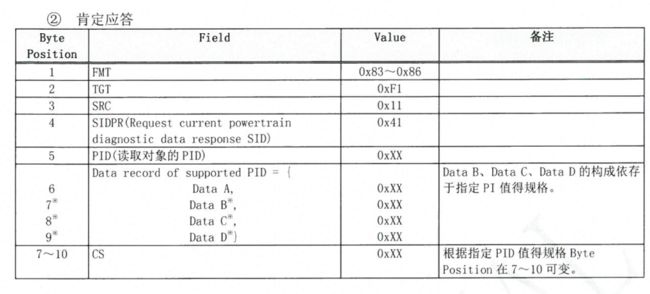
其中解析方式可以参照当前协议中ID支持的标准解析方式,我开发的PID都符合J1979的解析方式,所以我就按照如下表进行解析数据。
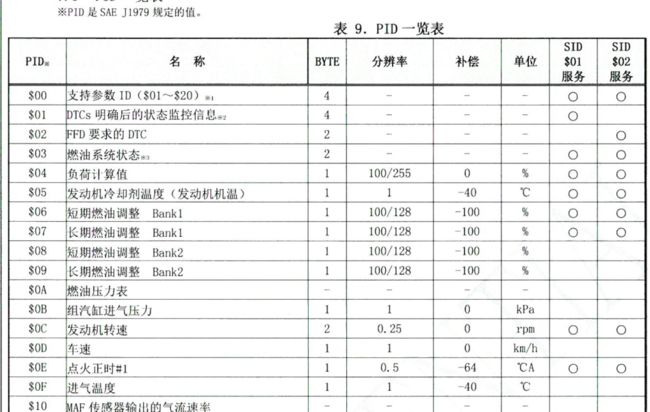
汽车现在有新的解析标准,大家可以自行查找,这里给大家描述的是一种方法,至于最终开发的产品,请严格按ECU所符合的标准来操作。
同理:车速的读取信息
tester ->德尔福ECU hex:C2 33 F1 01 0D F4
德尔福ECU-> tester hex:83 F1 10 41 0D 23 F5
读取关键词车速为 0x23
BOSH ECU回应格式为 hex:C3 F1 11 41 0D 00 13
读取关键词车速为 0x00
解析判断代码如下:
u8 ReceiveReadCommData(u8 *p,u8 len){u16 EngRpm,carSpeed;switch(*++p)//关键字判断{case 0x0C:{EngRpm=((*(((u8*)p)+1))*256+(*(((u8*)p)+2)))/4;break;}case 0x0D:{carSpeed=*(((u8*)p)+1);break;}default:break;}return 0;}
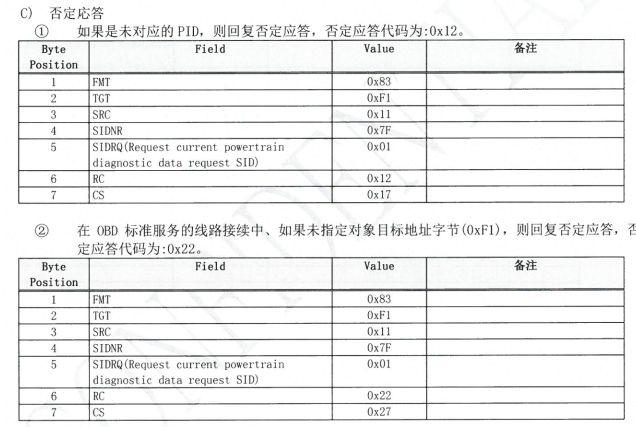
但是有些时间我们会遇到读取过来的数据无法使用,那么我们第一要判断的就是否是服务ID不支持,虽然上面可以看到很多ID的解析方式,甚至ECU都会回应你正确的格式,但是有些时候外部接线以及其他原因,我们获得的数据是无法使用的。
比如车速,如果ECU没有此项功能,ECU则会回复0x12否定代码,示例如下:
tester->:C233F1010DF4
ECU ->: 83F1117F011217
但是有些时候,因为一些原因该功能ECU支持信息回复,但是实际上ECU上硬线并没有连接,所以需要我们及时分辨:
五、读取一体的函数结构
加上昨天现在有几个ID的读取了,昨天没有分享读取的总函数,现在展示一下读取执行的总函数:仅供参考
KlinSendTimTypeDefTab KlineSendTimTab[KlineTask] ={{ 0, 0, 3 , *Tester }, //用来与ECU保持长连接{ 0, 0, 1 , *KLineReadrpm },{ 0, 0, 1 , *KLineReadSpeed},{ 0, 0, 15 , *ReadDTC },{ 1, 0, 20 , *KLineDtcClear },};u8 KlineScan(void){if(KlinRcvLen()>3){KlineAnalyz(KlinRcvBuff(), KlinRcvLen());//调用串口接收函数memset((u8*)KlinRcvBuff(),0x00, 0xff);}KLIN_RecOK = 0;KlinClsRecvd();}if (KlineSendIndFlag.flag == 0){if (KlineSendIndFlag.init == 1){printf("Klin_init\r\n");KlineFastInit();KlineSendIndFlag.count = 0;KlineSendIndFlag.src = 600;KlineSendIndFlag.flag = 1;(KlineSendIndFlag.cnt > 8)? (KlineSendIndFlag.cnt =0):(KlineSendIndFlag.cnt++);if(KlineSendIndFlag.cnt>3&&KlineSendIndFlag.cnt<6){KlineSendIndFlag.init =1;KlineSendIndFlag.count = 0;KlineSendIndFlag.flag =0;KlineSendIndFlag.sta=0;/*判断为0*/}else{KlinComInit();}}else{for (char i = 0; i < sizeof(KlineSendTimTab)/sizeof(KlinSendTimTypeDefTab); i++){if (KlineSendTimTab[i].flag == 0){KlineSendTimTab[i].flag = 1;KlineSendTimTab[i].count = 0;//计算接收时间长度KlineSendTimTab[i].p() ;KlineSendIndFlag.flag = 1;KlineSendIndFlag.count = 0;if(KlineSendIndFlag.cnt)KlineSendIndFlag.cnt =0; /*转为0*/break;}}}}return 0;}
这就是我分享的kwp2000解析,还有很多细节操作,实际开发和文字描述上还是差距很多,如有需要欢迎大家联系我与我交流,添加我的微信:become_me。

更多分享,扫码关注我