Code.V光学设计学习(三)——公差分析
文章目录
- 1、公差评价指标
- 2、公差示例分析
- 2.1 不考虑公差补偿器
- 2.2 考虑公差补偿器
- 2.3 改变光学后焦补偿
- 2.4 公差概率函数
- 3、曲面公差类型
- 4、零件公差类型
1、公差评价指标
公差分析是光学设计重要的一步,主要评估加工精度和生产可行性。在code.v中公差(TOR)评价指标主要有,具体可见 分析>>公差:
(1)、MTF
(2)、RMS波前
(3)、光纤耦合效率
(4)、偏振依赖损耗
(5)、畸变
2、公差示例分析
-
打开code.v中单透镜示例文件(Command:RES CV_LENS:SINGLET);
-
寻找最佳焦点位置(Command:WAV;RFO Y; GO),可见RMS波前差为0.4334

2.1 不考虑公差补偿器
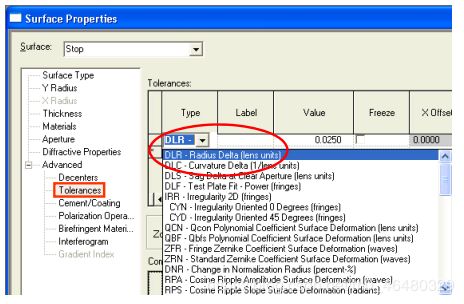
设置加工公差,本例中考虑S1面曲率和厚度进行公差限制(DLR S1;DLT S1)
默认公差范围均是±0.025mm
反敏感度分析,分析>>公差>>RMS波前,tab栏 “计算”,可以将 每个公差 的的敏感度进行分析,具体设置如下(TOR;ROU N;INV 0.01;GO):
对于公差引起的RMS波前,允许的下降为0.01

输出结果为:
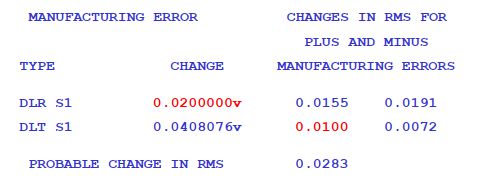
可以看出S1面曲率变化为0.02mm,即未达到设定的±0.025mm时,RMS波前就已经超出的0.01的承受范围;
S1面厚度在+0.0480876时,RMS波前会引起0.01的下降。
2.2 考虑公差补偿器
补偿器是在设计分析中考虑实际镜头装配过程中对光学后焦的调节;
对Image面设置补偿,具体设置如下(CMP DLZ SI):
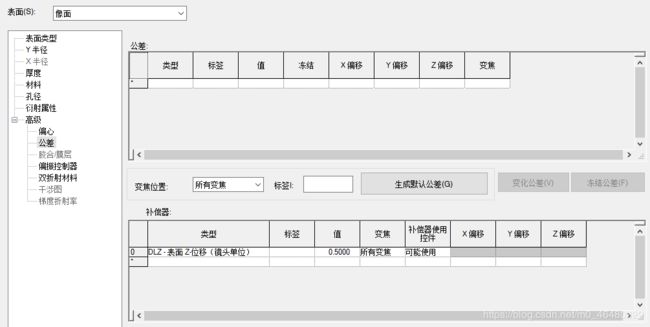
再次进行公差分析,输出结果如下:

实际上,S1的厚度公差已经达到上限(±0.5mm),默认为20x输入的数据,20*0.025mm=±0.5mm;
S1曲面改变量达到公差补偿器限制。
2.3 改变光学后焦补偿
将image面光学后焦修改为3(CMP DLZ SI 3.0),如下所示:
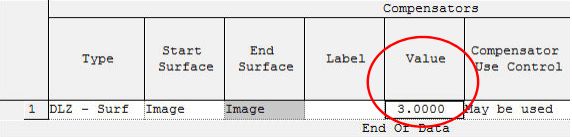
再次进行公差分析,可得:

公差取整

更改公差限制(TOR;INV 0.01;LIM DLT 0.02 1.0 0.02;LIM DLR 0.02 0.5 0.02;GO)
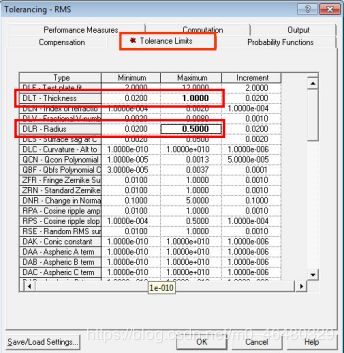
公差分析
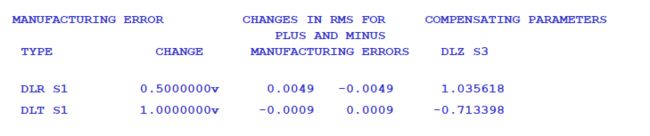
可见达到最大的公差范围,光学性能RMS波前依然在允许范围内。
2.4 公差概率函数
基于公差概率函数的概率变化和累积概率分析
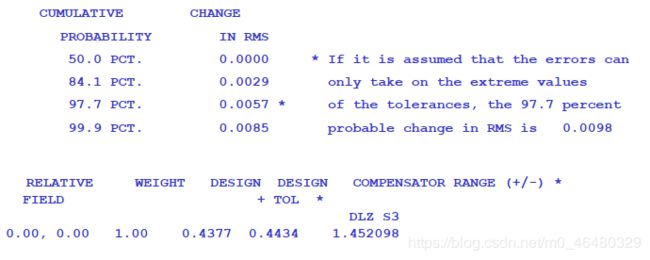
公差分析中的概率函数主要有:均匀,高斯,终点,第二矩和第四矩;
主要用于预测加工可行性;

TOR’s inverse sensitivity analysis will help reduce system sensitivity by attempting to set each tolerance to contribute equally to the performance degradation of the system。
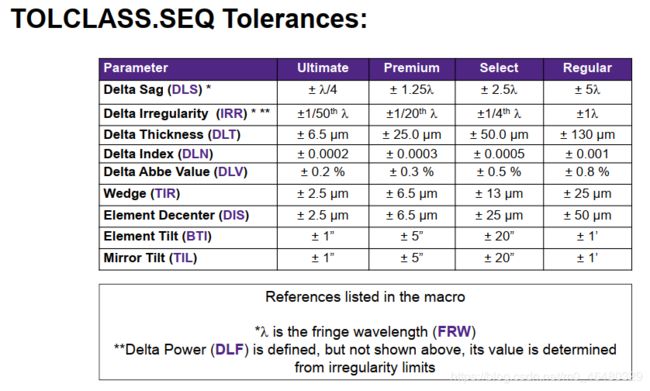
3、曲面公差类型
- Changes in radius
–DLR (delta radius)
–DLC (delta curvature)
–DLS (delta sag at clear aperture)
–DLF (delta fringe - test plate fit)
–IRR (cylindrical irregularity in fringes)
– CYN (cylinder normal - oriented at 0°)
– CYD (cylinder diagonal - oriented at 45°)

曲率公差函数(DLR、DLF、DLS或DLC)

玻璃性质公差函数
DLN—折射率、DLV—阿贝数。
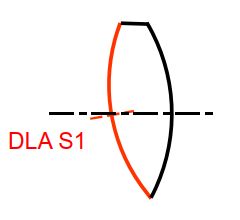
偏心和倾斜
DEC(偏心)、DLX、DLY和DLZ

TIL(倾斜)、DLA(α倾斜)、DLB(β倾斜),DLG(γ倾斜)
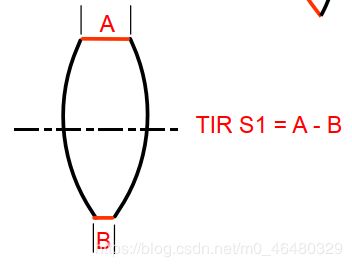
楔子公差
TIR,TRX(TIR in X),TRY(TIR in Y)
DLT和DLZ的区别
4、零件公差类型
Group tilt
– BTI (barrel tilt in radians)
• BTX (barrel tilt in X in radians)
• BTY (barrel tilt in Y in radians)
– BRL (barrel roll about Z in radians)
• Group displacement
– DIS (displacement)
• DSX (displacement in X)
• DSY (displacement in Y)
– DSZ (displacement in Z)
• Group roll (cemented surfaces)
– ROL (roll)
• RLX (roll in X)
• RLY (roll in Y)
• R = “reverse”
(roll about second surface)