- opencv、torch、torchvision、tensorflow的区别
一、框架定位与核心差异PyTorch动态计算图:实时构建计算图支持Python原生控制流(如循环/条件),调试便捷。学术主导:2025年工业部署份额24%,适合快速原型开发(如无人机自动驾驶、情绪识别)。TensorFlow静态计算图优化:预编译图结构提升部署效率支持动态图(Eager模式)兼顾灵活性。工业部署首选:市场份额38%,擅长边缘计算(YOLO部署)和大规模项目(工业自动化)-59)。O
- 计算机毕设——高校在线学习平台
随着教育信息化改革不断推进,传统教学模式逐渐暴露出诸多弊端,例如资源分散、互动匮乏、教学反馈滞后等。如何借助现代Web技术构建一个功能完善、稳定高效的教学平台,成为许多高校面临的重要课题。本文将从我的毕业设计项目《在线学习平台》出发,分享一个完整在线教育平台的设计与开发过程,涵盖技术选型、系统架构、核心模块实现以及系统测试等内容,适合对SpringBoot+Vue全栈开发感兴趣的同学学习参考。一、
- OpenCV中常用特征提取算法(SURF、ORB、SIFT和AKAZE)用法示例(C++和Python)
点云SLAM
图形图像处理opencv算法ORB算法SIFT算法SURF算法AKAZE算法计算机视觉
OpenCV中提供了多种常用的特征提取算法,广泛应用于图像匹配、拼接、SLAM、物体识别等任务。以下是OpenCV中几个主流特征提取算法的用法总结与代码示例,涵盖C++和Python两个版本。常用特征提取算法列表算法特点是否需额外模块SIFT(尺度不变特征)稳定性强、可旋转缩放xfeatures2d模块SURF(加速稳健特征)快速但专利保护xfeatures2d模块ORB(OrientedFAST
- OpenCV学习(二)-二维、三维识别
香蕉可乐荷包蛋
#OpenCVopencv学习人工智能
OpenCV是一个功能强大的计算机视觉库,可以用于识别和处理二维图像和三维图像。以下是关于二维图像和三维图像识别的基础知识和示例代码。1.二维图像识别二维图像识别通常包括图像分类、对象检测、特征提取等任务。以下是一些常见的操作:1.1图像分类使用预训练模型对图像进行分类,例如使用深度学习模型(如ResNet、MobileNet等)。importcv2#加载预训练的深度学习模型net=cv2.dnn
- 数字图像处理(三:图像如果当作矩阵,那加减乘除处理了矩阵,那图像咋变):从LED冬奥会、奥运会及春晚等等大屏,到手机小屏,快来挖一挖里面都有什么
数字图像处理(三)一、(准备工作:咋玩,用什么玩具)图像以矩阵形式存储,那矩阵一变、图像立刻跟着变?1.Python+JupyterNotebook/Lab+库(NumPy,OpenCV,Matplotlib,scikit-image)2.MATLAB+ImageProcessingToolbox3.JavaScript+HTML5Canvas+浏览器4.专业的图像处理软件(带脚本/插件功能)二、
- 【舰艇控制】基于matlab具有不确定性和扰动的水面舰艇的自适应有限时间平滑非线性滑模跟踪控制【含Matlab源码 13748期】复现含文献
海神之光
Matlab路径规划(进阶版)matlab
欢迎来到海神之光博客之家✅博主简介:热爱科研的Matlab仿真开发者,修心和技术同步精进;个人主页:海神之光代码获取方式:海神之光Matlab王者学习之路—代码获取方式Matlab毕设:Matlab毕设系列–说明期刊发表:发表北大核心,SCI不是梦!!⛳️座右铭:行百里者,半于九十。更多Matlab路径规划仿真内容点击①Matlab路径规划(进阶版)②付费专栏Matlab路径规划(初级版)⛳️关注
- 新手向:基于 Python 的简易视频剪辑工具
在数字媒体时代,视频创作已成为大众表达的重要形式,从个人vlog制作到企业宣传视频,视频内容的需求呈现爆发式增长。传统专业软件如AdobePremierePro虽功能强大,提供完整的非线性编辑系统,但存在学习曲线陡峭(新手通常需要数周系统学习)、资源占用高(最低配置要求8GB内存)、授权费用昂贵(订阅价约20美元/月)等痛点。相比之下,Python凭借其丰富的多媒体库生态系统(如OpenCV、Mo
- 河道污染难溯源?3步搭建陌讯实时目标检测系统
2501_92472966
目标检测人工智能计算机视觉算法视觉检测
开篇痛点「凌晨3点水泵房渗漏报警,运维人员冒雨排查却是一场误判」——这是某水务企业技术总监向我吐槽的真实案例。在智慧水务场景中,传统视觉算法面临三大死穴:水体反光干扰、微小目标漏检、边缘设备算力受限。尤其当暴雨导致水体浑浊时,OpenCV边缘检测的误报率可达35%以上。技术解析:陌讯多模态融合架构为解决复杂环境泛化问题,陌讯视觉算法提出FMT-Net(FusionMultimodalTransfo
- 养老院管理系统基于SpringBoot的养老院管理系统系统设计与实现(源码+论文+部署讲解等)
博主介绍:✌全网粉丝60W+,csdn特邀作者、Java领域优质创作者、csdn/掘金/哔哩哔哩/知乎/道客/小红书等平台优质作者,计算机毕设实战导师,目前专注于大学生项目实战开发,讲解,毕业答疑辅导,欢迎高校老师/同行前辈交流合作✌技术栈范围:SpringBoot、Vue、SSM、Jsp、HLMT、Nodejs、Python、爬虫、数据可视化、小程序、安卓app、大数据、物联网、机器学习、单片机
- 人脸识别实战:使用Python OpenCV 和深度学习进行人脸识别(2)
先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!因此收集整理了一份《2024年最新Python全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课
- 051-OpenCV GrabCut图像分割算法
话不多说,上代码,看结果。importcv2#导入库importnumpyasnp'''cv2.imread(filename,flags)#filename为文件名,图片与.py文件在一个文件夹时输入文件名即可#不在一个文件夹时输入图片的路径和名字#flags为图片的颜色类型,默认为1,灰度图像为0'''img=cv2.imread('89.jpg')mask=np.zeros(img.shap
- opencv常用函数汇总
Sky.Kevin
opencv计算机视觉
一、色彩空间类型转换1、cv2.cvtColordst=cv2.cvtColor(src,code[,dstCn])式中:dst表示输出图像,与原始输入图像具有同样的数据类型和深度。src表示原始输入图像。可以是8位无符号图像、16位无符号图像,或者单精度浮点数等。code是色彩空间转换码,表4-2展示了其枚举值。dstCn是目标图像的通道数。如果参数为默认的0,则通道数自动通过原始输入图像和co
- python ffmpeg pipe_如何使用python从ffmpeg输出管道?
weixin_39611725
pythonffmpegpipe
我正在尝试将FFmpeg的输出用管道输送到Python中。我正在从一个视频采集卡读取图像,我成功地使用dshow从命令行将其读入输出文件。我正在尝试从卡抓取图像到我的OpenCv代码,以便能够进一步处理数据。不幸的是,当我通过管道输出图像时,我只得到视频的显示,如链接所示:link:s000.tinyupload.com/?file_id=15940665795196022618.我使用的代码如下
- 金属表面划痕检测实践指南 - 使用OpenCV
IYA1738
本文还有配套的精品资源,点击获取简介:在机器视觉领域,表面划痕检测是一项关键技术,特别是在金属表面。本文深入探索了如何使用OpenCV库在VisualStudio2019环境下进行表面划痕检测。主要技术包括图像作差、动态阈值处理、边缘检测以及形态学操作。通过这些方法,我们可以有效地从金属表面图像中提取划痕特征。本文详细描述了实施表面划痕检测的步骤,包括图像读取、差分图像计算、阈值处理、边缘检测优化
- opencv 4.12.0版本发布详解:核心优化与新特性全解析
Risehuxyc
#opencvopencv人工智能计算机视觉
OpenCV4.12.0夏季更新带来核心模块优化、图像处理增强、深度学习支持扩展及新兴硬件适配,全面提升计算机视觉开发效率与性能。引言OpenCV(开源计算机视觉库)作为计算机视觉领域最受欢迎的开源库之一,在2025年7月发布了4.12.0版本。这个夏季更新带来了大量性能优化、新功能和错误修复,覆盖了核心模块、图像处理、3D校准、深度学习等多个领域。本文将详细介绍OpenCV4.12.0的主要更新
- 基于Opencv的工业缺陷检测/C++版本
Deeeil
opencvc++人工智能
找工作过程中发现要求会C++的工业检测,用一个项目熟悉整个流程#include#include#include//定义一个结构体来存储缺陷信息structDefect{inttype;//缺陷类型,1代表划痕,2代表污渍intx;//缺陷的x坐标inty;//缺陷的y坐标intwidth;//缺陷的宽度intheight;//缺陷的高度//构造函数,初始化缺陷信息Defect(intt,intx,
- 使用 C++ 和 OpenCV 进行表面划痕检测
whoarethenext
c++opencv开发语言划痕检测
使用C++和OpenCV进行表面划痕检测在工业自动化生产中,产品表面的质量控制至关重要。划痕作为一种常见的表面缺陷,其检测是许多领域(如金属、玻璃、塑料制造)质量保证流程中的一个关键环节。本文将介绍如何使用C++和强大的计算机视觉库OpenCV来实现一个基本的表面划痕检测算法。核心思路划痕通常在图像中表现为具有以下一个或多个特征的区域:高对比度的线性结构:划痕区域的像素强度通常会与其周围背景有明显
- ROS2 视频采集节点实现
ZPC8210
ROS音视频
一个完整的ROS2视频采集节点的实现,使用OpenCV进行视频捕获并通过ROS2发布图像消息。1.创建功能包首先创建一个新的ROS2功能包(如果还没有):bashros2pkgcreatevideo_capture--build-typeament_python--dependenciesrclpysensor_msgscv_bridgeopencv-python2.实现视频采集节点在video_
- ROS2 通过相机确定物品坐标位置
要实现通过相机确定物品坐标位置,通常需要相机标定、物体检测和坐标转换几个步骤。下面我将提供一个完整的解决方案,包括相机标定、物体检测和3D坐标估计。1.系统架构相机标定-获取相机内参和畸变系数物体检测-使用OpenCV或深度学习模型检测物品坐标转换-将2D图像坐标转换为3D世界坐标ROS2集成-将上述功能集成到ROS2节点中2.实现步骤2.1创建功能包bashros2pkgcreateobject
- OpenCV特征点提取算法orb、surf、sift对比
点云SLAM
图形图像处理ORB算法SIFT算法人工智能计算机视觉算法
下面是OpenCV中三种常用特征点提取算法:ORB、SURF和SIFT的详细对比,从算法原理、性能、使用限制和适用场景多维度进行总结,帮助大家在实际项目中合理选择。一览表:ORBvs.SURFvs.SIFT属性/算法ORBSURFSIFT全称OrientedFASTandRotatedBRIEFSpeededUpRobustFeaturesScale-InvariantFeatureTransfo
- C#实现基于ffmpeg加虹软的人脸识别
关于人脸识别目前的人脸识别已经相对成熟,有各种收费免费的商业方案和开源方案,其中OpenCV很早就支持了人脸识别,在我选择人脸识别开发库时,也横向对比了三种库,包括在线识别的百度、开源的OpenCV和商业库虹软(中小型规模免费)。百度的人脸识别,才上线不久,文档不太完善,之前联系百度,官方也给了我基于Android的Example,但是不太符合我的需求,一是照片需要上传至百度服务器(这个是最大的问
- OpenCV 入门指南 —— 从环境搭建到图像处理
m0_74751715
opencv图像处理人工智能python
文章目录前言一、什么是OpenCV?二、环境准备与安装1.Python虚拟环境2.安装OpenCV3.验证安装三、读取与显示图像四、常见图像处理操作1.色彩空间转换2.图像平滑(模糊)3.边缘检测(Canny算法)4.在图像上绘制图形与文字五、视频与摄像头操作六、推荐学习路线七、参考资料前言在计算机视觉领域,OpenCV(OpenSourceComputerVisionLibrary)凭借其开源、
- 手绘电路图的节点和端点检测一个简化版的算法实现框架
zhangfeng1133
算法
于论文描述,我将提供一个简化版的算法实现框架,用于手绘电路图的节点和端点检测,并整合生成电路原理图。以下代码结合了YOLOv5目标检测和传统图像处理技术,符合论文中提到的98.2%mAP和92%节点识别准确率的关键指标。核心算法实现(Python+OpenCV+YOLOv5)importcv2importnumpyasnpimporttorchfromyolov5importYOLOv5#需要安装
- 人脸数目统计系统实现:基于OpenCV和C++的人脸识别
本文还有配套的精品资源,点击获取简介:本项目介绍如何利用OpenCV库和C++语言开发一个人脸识别系统,用于统计图像中的人脸数量。内容涵盖人脸识别的基本原理、关键步骤及技术细节,包括使用Haar级联分类器进行人脸检测,并通过C++编程实现从图像处理到人脸统计的全过程。1.人脸识别基本原理与步骤人脸识别技术已经在安全验证、智能家居、社交媒体等多个领域得到了广泛应用。其基本原理是通过分析人脸图像中的特
- 基于python的图像识别_基于PYTHON的图片文字识别
文本资料的图像文件进行分析识别处理,获取文字及版面信息的过程。一般包括以下几个过程:图像输入、图像前处理、预识别:1图像输入:对于不同的图像格式,有着不同的存储格式,不同的压缩方式,目前有OpenCV、CxImage等开源项目。2预处理:主要包括二值化,噪声去除,倾斜较正等。2.1二值化:对摄像头拍摄的图片,大多数是彩色图像,彩色图像所含信息量巨大,对于图片的内容,我们可以简单的分为前景与背景,为
- 感受大师的代码风格_opencv源代码结构分析一
最近在调用opencv的时候,我总是去看看opencv的原代码.在那些烦琐的宏定义里面感觉自己还是很有意思的.cvGet2D(constCvArr*arr,inty,intx);//第一个坐标是y坐标,第二个是x坐标CV_IMPLCvScalarcvGet2D(constCvArr*arr,inty,intx)//CV_IMPL宏定义extern"C"{CvScalarscalar={{0,0,0
- Opencv学习_2 (opencv结构&显示图像)
opencv结构:1:主要包含:cxcorecvmachinelearninghighguicvcamcvaux2:cxcore:基础结构:CvPoint,CvSize,CvScalar等数组结构:cvCreateImage,cvCreateMat等动态结构:CvMemStorage,CvMemBlock等绘图函数:cvLine,cvRectangle等数据保存和运行时类型信息:CvFileSto
- 探索OpenCV 3.2源码:计算机视觉的架构与实现
轩辕姐姐
本文还有配套的精品资源,点击获取简介:OpenCV是一个全面的计算机视觉库,提供广泛的功能如图像处理、对象检测和深度学习支持。OpenCV3.2版本包含了改进的深度学习和GPU加速特性,以及丰富的示例程序。本压缩包文件提供了完整的OpenCV3.2源代码,对于深入学习计算机视觉算法和库实现机制十分宝贵。源码的模块化设计、C++接口、算法实现、多平台支持和性能优化等方面的深入理解,都将有助于开发者的
- 霍夫变换(Hough Transform)算法原来详解和纯C++代码实现以及OpenCV中的使用示例
点云SLAM
算法图形图像处理算法opencv图像处理与计算机视觉算法直线提取检测目标检测霍夫变换算法
霍夫变换(HoughTransform)是一种经典的图像处理与计算机视觉算法,广泛用于检测图像中的几何形状,例如直线、圆、椭圆等。其核心思想是将图像空间中的“点”映射到参数空间中的“曲线”,从而将形状检测问题转化为参数空间中的峰值检测问题。一、霍夫变换基本思想输入:边缘图像(如经过Canny边缘检测)输出:一组满足几何模型的形状(如直线、圆)关键思想:图像空间中的一个点→参数空间中的一个曲线参数空
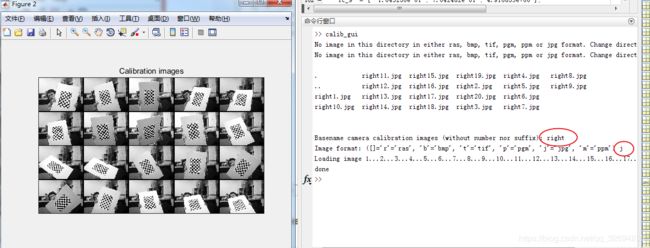
- 用OpenCV标定相机内参应用示例(C++和Python)
下面是一个完整的使用OpenCV进行相机内参标定(CameraCalibration)的示例,包括C++和Python两个版本,基于棋盘格图案标定。一、目标:相机标定通过拍摄多张带有棋盘格图案的图像,估计相机的内参:相机矩阵(内参)K畸变系数distCoeffs可选外参(R,T)标定精度指标(如重投影误差)二、棋盘格参数设置(根据自己的棋盘格设置):棋盘格角点数:9x6(内角点,9列×6行);每个
- 异常的核心类Throwable
无量
java源码异常处理exception
java异常的核心是Throwable,其他的如Error和Exception都是继承的这个类 里面有个核心参数是detailMessage,记录异常信息,getMessage核心方法,获取这个参数的值,我们可以自己定义自己的异常类,去继承这个Exception就可以了,方法基本上,用父类的构造方法就OK,所以这么看异常是不是很easy
package com.natsu;
- mongoDB 游标(cursor) 实现分页 迭代
开窍的石头
mongodb
上篇中我们讲了mongoDB 中的查询函数,现在我们讲mongo中如何做分页查询
如何声明一个游标
var mycursor = db.user.find({_id:{$lte:5}});
迭代显示游标数
- MySQL数据库INNODB 表损坏修复处理过程
0624chenhong
tomcatmysql
最近mysql数据库经常死掉,用命令net stop mysql命令也无法停掉,关闭Tomcat的时候,出现Waiting for N instance(s) to be deallocated 信息。查了下,大概就是程序没有对数据库连接释放,导致Connection泄露了。因为用的是开元集成的平台,内部程序也不可能一下子给改掉的,就验证一下咯。启动Tomcat,用户登录系统,用netstat -
- 剖析如何与设计人员沟通
不懂事的小屁孩
工作
最近做图烦死了,不停的改图,改图……。烦,倒不是因为改,而是反反复复的改,人都会死。很多需求人员不知该如何与设计人员沟通,不明白如何使设计人员知道他所要的效果,结果只能是沟通变成了扯淡,改图变成了应付。
那应该如何与设计人员沟通呢?
我认为设计人员与需求人员先天就存在语言障碍。对一个合格的设计人员来说,整天玩的都是点、线、面、配色,哪种构图看起来协调;哪种配色看起来合理心里跟明镜似的,
- qq空间刷评论工具
换个号韩国红果果
JavaScript
var a=document.getElementsByClassName('textinput');
var b=[];
for(var m=0;m<a.length;m++){
if(a[m].getAttribute('placeholder')!=null)
b.push(a[m])
}
var l
- S2SH整合之session
灵静志远
springAOPstrutssession
错误信息:
Caused by: org.springframework.beans.factory.BeanCreationException: Error creating bean with name 'cartService': Scope 'session' is not active for the current thread; consider defining a scoped
- xmp标签
a-john
标签
今天在处理数据的显示上遇到一个问题:
var html = '<li><div class="pl-nr"><span class="user-name">' + user
+ '</span>' + text + '</div></li>';
ulComme
- Ajax的常用技巧(2)---实现Web页面中的级联菜单
aijuans
Ajax
在网络上显示数据,往往只显示数据中的一部分信息,如文章标题,产品名称等。如果浏览器要查看所有信息,只需点击相关链接即可。在web技术中,可以采用级联菜单完成上述操作。根据用户的选择,动态展开,并显示出对应选项子菜单的内容。 在传统的web实现方式中,一般是在页面初始化时动态获取到服务端数据库中对应的所有子菜单中的信息,放置到页面中对应的位置,然后再结合CSS层叠样式表动态控制对应子菜单的显示或者隐
- 天-安-门,好高
atongyeye
情感
我是85后,北漂一族,之前房租1100,因为租房合同到期,再续,房租就要涨150。最近网上新闻,地铁也要涨价。算了一下,涨价之后,每次坐地铁由原来2块变成6块。仅坐地铁费用,一个月就要涨200。内心苦痛。
晚上躺在床上一个人想了很久,很久。
我生在农
- android 动画
百合不是茶
android透明度平移缩放旋转
android的动画有两种 tween动画和Frame动画
tween动画;,透明度,缩放,旋转,平移效果
Animation 动画
AlphaAnimation 渐变透明度
RotateAnimation 画面旋转
ScaleAnimation 渐变尺寸缩放
TranslateAnimation 位置移动
Animation
- 查看本机网络信息的cmd脚本
bijian1013
cmd
@echo 您的用户名是:%USERDOMAIN%\%username%>"%userprofile%\网络参数.txt"
@echo 您的机器名是:%COMPUTERNAME%>>"%userprofile%\网络参数.txt"
@echo ___________________>>"%userprofile%\
- plsql 清除登录过的用户
征客丶
plsql
tools---preferences----logon history---history 把你想要删除的删除
--------------------------------------------------------------------
若有其他凝问或文中有错误,请及时向我指出,
我好及时改正,同时也让我们一起进步。
email : binary_spac
- 【Pig一】Pig入门
bit1129
pig
Pig安装
1.下载pig
wget http://mirror.bit.edu.cn/apache/pig/pig-0.14.0/pig-0.14.0.tar.gz
2. 解压配置环境变量
如果Pig使用Map/Reduce模式,那么需要在环境变量中,配置HADOOP_HOME环境变量
expor
- Java 线程同步几种方式
BlueSkator
volatilesynchronizedThredLocalReenTranLockConcurrent
为何要使用同步? java允许多线程并发控制,当多个线程同时操作一个可共享的资源变量时(如数据的增删改查), 将会导致数据不准确,相互之间产生冲突,因此加入同步锁以避免在该线程没有完成操作之前,被其他线程的调用, 从而保证了该变量的唯一性和准确性。 1.同步方法&
- StringUtils判断字符串是否为空的方法(转帖)
BreakingBad
nullStringUtils“”
转帖地址:http://www.cnblogs.com/shangxiaofei/p/4313111.html
public static boolean isEmpty(String str)
判断某字符串是否为空,为空的标准是 str==
null
或 str.length()==
0
- 编程之美-分层遍历二叉树
bylijinnan
java数据结构算法编程之美
import java.util.ArrayList;
import java.util.LinkedList;
import java.util.List;
public class LevelTraverseBinaryTree {
/**
* 编程之美 分层遍历二叉树
* 之前已经用队列实现过二叉树的层次遍历,但这次要求输出换行,因此要
- jquery取值和ajax提交复习记录
chengxuyuancsdn
jquery取值ajax提交
// 取值
// alert($("input[name='username']").val());
// alert($("input[name='password']").val());
// alert($("input[name='sex']:checked").val());
// alert($("
- 推荐国产工作流引擎嵌入式公式语法解析器-IK Expression
comsci
java应用服务器工作Excel嵌入式
这个开源软件包是国内的一位高手自行研制开发的,正如他所说的一样,我觉得它可以使一个工作流引擎上一个台阶。。。。。。欢迎大家使用,并提出意见和建议。。。
----------转帖---------------------------------------------------
IK Expression是一个开源的(OpenSource),可扩展的(Extensible),基于java语言
- 关于系统中使用多个PropertyPlaceholderConfigurer的配置及PropertyOverrideConfigurer
daizj
spring
1、PropertyPlaceholderConfigurer
Spring中PropertyPlaceholderConfigurer这个类,它是用来解析Java Properties属性文件值,并提供在spring配置期间替换使用属性值。接下来让我们逐渐的深入其配置。
基本的使用方法是:(1)
<bean id="propertyConfigurerForWZ&q
- 二叉树:二叉搜索树
dieslrae
二叉树
所谓二叉树,就是一个节点最多只能有两个子节点,而二叉搜索树就是一个经典并简单的二叉树.规则是一个节点的左子节点一定比自己小,右子节点一定大于等于自己(当然也可以反过来).在树基本平衡的时候插入,搜索和删除速度都很快,时间复杂度为O(logN).但是,如果插入的是有序的数据,那效率就会变成O(N),在这个时候,树其实变成了一个链表.
tree代码:
- C语言字符串函数大全
dcj3sjt126com
cfunction
C语言字符串函数大全
函数名: stpcpy
功 能: 拷贝一个字符串到另一个
用 法: char *stpcpy(char *destin, char *source);
程序例:
#include <stdio.h>
#include <string.h>
int main
- 友盟统计页面技巧
dcj3sjt126com
技巧
在基类调用就可以了, 基类ViewController示例代码
-(void)viewWillAppear:(BOOL)animated
{
[super viewWillAppear:animated];
[MobClick beginLogPageView:[NSString stringWithFormat:@"%@",self.class]];
- window下在同一台机器上安装多个版本jdk,修改环境变量不生效问题处理办法
flyvszhb
javajdk
window下在同一台机器上安装多个版本jdk,修改环境变量不生效问题处理办法
本机已经安装了jdk1.7,而比较早期的项目需要依赖jdk1.6,于是同时在本机安装了jdk1.6和jdk1.7.
安装jdk1.6前,执行java -version得到
C:\Users\liuxiang2>java -version
java version "1.7.0_21&quo
- Java在创建子类对象的同时会不会创建父类对象
happyqing
java创建子类对象父类对象
1.在thingking in java 的第四版第六章中明确的说了,子类对象中封装了父类对象,
2."When you create an object of the derived class, it contains within it a subobject of the base class. This subobject is the sam
- 跟我学spring3 目录贴及电子书下载
jinnianshilongnian
spring
一、《跟我学spring3》电子书下载地址:
《跟我学spring3》 (1-7 和 8-13) http://jinnianshilongnian.iteye.com/blog/pdf
跟我学spring3系列 word原版 下载
二、
源代码下载
最新依
- 第12章 Ajax(上)
onestopweb
Ajax
index.html
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd">
<html xmlns="http://www.w3.org/
- BI and EIM 4.0 at a glance
blueoxygen
BO
http://www.sap.com/corporate-en/press.epx?PressID=14787
有机会研究下EIM家族的两个新产品~~~~
New features of the 4.0 releases of BI and EIM solutions include:
Real-time in-memory computing –
- Java线程中yield与join方法的区别
tomcat_oracle
java
长期以来,多线程问题颇为受到面试官的青睐。虽然我个人认为我们当中很少有人能真正获得机会开发复杂的多线程应用(在过去的七年中,我得到了一个机会),但是理解多线程对增加你的信心很有用。之前,我讨论了一个wait()和sleep()方法区别的问题,这一次,我将会讨论join()和yield()方法的区别。坦白的说,实际上我并没有用过其中任何一个方法,所以,如果你感觉有不恰当的地方,请提出讨论。
&nb
- android Manifest.xml选项
阿尔萨斯
Manifest
结构
继承关系
public final class Manifest extends Objectjava.lang.Objectandroid.Manifest
内部类
class Manifest.permission权限
class Manifest.permission_group权限组
构造函数
public Manifest () 详细 androi
- Oracle实现类split函数的方
zhaoshijie
oracle
关键字:Oracle实现类split函数的方
项目里需要保存结构数据,批量传到后他进行保存,为了减小数据量,子集拼装的格式,使用存储过程进行保存。保存的过程中需要对数据解析。但是oracle没有Java中split类似的函数。从网上找了一个,也补全了一下。
CREATE OR REPLACE TYPE t_split_100 IS TABLE OF VARCHAR2(100);
cr