180724 图解MaskRCNN模型代码(待更新)
本文内容:主要针对目前Github上的matterport/Mask_RCNN代码进行解读,该代码多达2875行, 对代码进行解读,有利于对文章及原理有进一步的理解.
参考文献
- ResNet及mask_rcnn中使用的ResNet网络结构 -【mask_rcnn】
- ResNet50 结构
- Andrew Ng deeplearning courese-4:Convolutional Neural Network
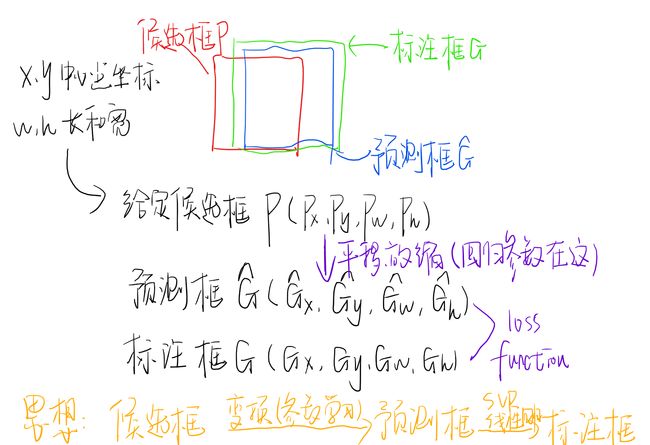
- Bounding box regression详解
- 物体检测论文-RCNN
Mask-RCNN model代码框架
- Utility Functions
- def log()
- class BatchNorm()
- Resnet Graph
- def identity_block()
- def conv_block()
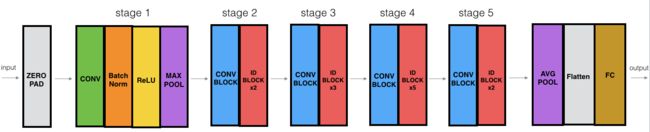
- def resnet_graph()
- Proposal Layer
- def apply_box_deltas_graph()
- def clip_boxes_graph()
- class ProposalLayer()
- ROIAlign Layer
- def log2_graph
- class PyramidROIAlign
- Detection Target Layer
- Detection Layer
- Region Proposal Network (RPN)
- Feature Pyramid Network Heads
- Loss Functions
- Data Generator
- MaskRCNN Class
- Data Formatting
- Miscellenous Graph Functions
Utility Functions
def log()
def log(text, array=None):
"""Prints a text message. And, optionally, if a Numpy array is provided it
prints it's shape, min, and max values.
"""
if array is not None:
text = text.ljust(25)
text += ("shape: {:20} min: {:10.5f} max: {:10.5f} {}".format(
str(array.shape),
array.min() if array.size else "",
array.max() if array.size else "",
array.dtype))
print(text)class BatchNorm()
class BatchNorm(KL.BatchNormalization):
"""Extends the Keras BatchNormalization class to allow a central place
to make changes if needed.
Batch normalization has a negative effect on training if batches are small
so this layer is often frozen (via setting in Config class) and functions
as linear layer.
"""
def call(self, inputs, training=None):
"""
Note about training values:
None: Train BN layers. This is the normal mode
False: Freeze BN layers. Good when batch size is small
True: (don't use). Set layer in training mode even when making inferences
"""
return super(self.__class__, self).call(inputs, training=training)Resnet Graph
Code adopted from:
https://github.com/fchollet/deep-learning-models/blob/master/resnet50.py
def identity_block()
def identity_block(input_tensor, kernel_size, filters, stage, block,
use_bias=True, train_bn=True):
"""The identity_block is the block that has no conv layer at shortcut
# Arguments
input_tensor: input tensor
kernel_size: default 3, the kernel size of middle conv layer at main path
filters: list of integers, the nb_filters of 3 conv layer at main path
stage: integer, current stage label, used for generating layer names
block: 'a','b'..., current block label, used for generating layer names
use_bias: Boolean. To use or not use a bias in conv layers.
train_bn: Boolean. Train or freeze Batch Norm layers
"""
nb_filter1, nb_filter2, nb_filter3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
x = KL.Conv2D(nb_filter1, (1, 1), name=conv_name_base + '2a',
use_bias=use_bias)(input_tensor)
x = BatchNorm(name=bn_name_base + '2a')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.Conv2D(nb_filter2, (kernel_size, kernel_size), padding='same',
name=conv_name_base + '2b', use_bias=use_bias)(x)
x = BatchNorm(name=bn_name_base + '2b')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.Conv2D(nb_filter3, (1, 1), name=conv_name_base + '2c',
use_bias=use_bias)(x)
x = BatchNorm(name=bn_name_base + '2c')(x, training=train_bn)
x = KL.Add()([x, input_tensor])
x = KL.Activation('relu', name='res' + str(stage) + block + '_out')(x)
return xdef conv_block()
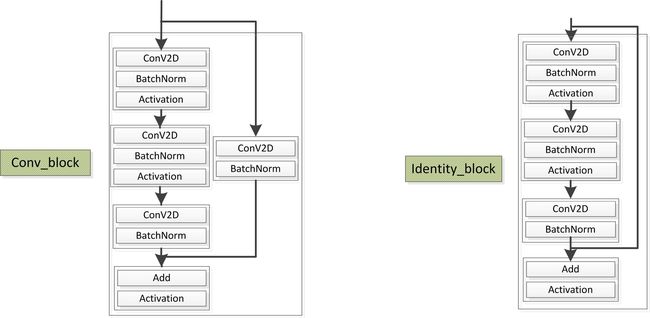
def conv_block(input_tensor, kernel_size, filters, stage, block,
strides=(2, 2), use_bias=True, train_bn=True):
"""conv_block is the block that has a conv layer at shortcut
# Arguments
input_tensor: input tensor
kernel_size: default 3, the kernel size of middle conv layer at main path
filters: list of integers, the nb_filters of 3 conv layer at main path
stage: integer, current stage label, used for generating layer names
block: 'a','b'..., current block label, used for generating layer names
use_bias: Boolean. To use or not use a bias in conv layers.
train_bn: Boolean. Train or freeze Batch Norm layers
Note that from stage 3, the first conv layer at main path is with subsample=(2,2)
And the shortcut should have subsample=(2,2) as well
"""
nb_filter1, nb_filter2, nb_filter3 = filters
conv_name_base = 'res' + str(stage) + block + '_branch'
bn_name_base = 'bn' + str(stage) + block + '_branch'
x = KL.Conv2D(nb_filter1, (1, 1), strides=strides,
name=conv_name_base + '2a', use_bias=use_bias)(input_tensor)
x = BatchNorm(name=bn_name_base + '2a')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.Conv2D(nb_filter2, (kernel_size, kernel_size), padding='same',
name=conv_name_base + '2b', use_bias=use_bias)(x)
x = BatchNorm(name=bn_name_base + '2b')(x, training=train_bn)
x = KL.Activation('relu')(x)
x = KL.Conv2D(nb_filter3, (1, 1), name=conv_name_base +
'2c', use_bias=use_bias)(x)
x = BatchNorm(name=bn_name_base + '2c')(x, training=train_bn)
shortcut = KL.Conv2D(nb_filter3, (1, 1), strides=strides,
name=conv_name_base + '1', use_bias=use_bias)(input_tensor)
shortcut = BatchNorm(name=bn_name_base + '1')(shortcut, training=train_bn)
x = KL.Add()([x, shortcut])
x = KL.Activation('relu', name='res' + str(stage) + block + '_out')(x)
return xdef resnet_graph()
def resnet_graph(input_image, architecture, stage5=False, train_bn=True):
"""Build a ResNet graph.
architecture: Can be resnet50 or resnet101
stage5: Boolean. If False, stage5 of the network is not created
train_bn: Boolean. Train or freeze Batch Norm layers
"""
assert architecture in ["resnet50", "resnet101"]
# Stage 1
x = KL.ZeroPadding2D((3, 3))(input_image)
x = KL.Conv2D(64, (7, 7), strides=(2, 2), name='conv1', use_bias=True)(x)
x = BatchNorm(name='bn_conv1')(x, training=train_bn)
x = KL.Activation('relu')(x)
C1 = x = KL.MaxPooling2D((3, 3), strides=(2, 2), padding="same")(x)
# Stage 2
x = conv_block(x, 3, [64, 64, 256], stage=2, block='a', strides=(1, 1), train_bn=train_bn)
x = identity_block(x, 3, [64, 64, 256], stage=2, block='b', train_bn=train_bn)
C2 = x = identity_block(x, 3, [64, 64, 256], stage=2, block='c', train_bn=train_bn)
# Stage 3
x = conv_block(x, 3, [128, 128, 512], stage=3, block='a', train_bn=train_bn)
x = identity_block(x, 3, [128, 128, 512], stage=3, block='b', train_bn=train_bn)
x = identity_block(x, 3, [128, 128, 512], stage=3, block='c', train_bn=train_bn)
C3 = x = identity_block(x, 3, [128, 128, 512], stage=3, block='d', train_bn=train_bn)
# Stage 4
x = conv_block(x, 3, [256, 256, 1024], stage=4, block='a', train_bn=train_bn)
block_count = {"resnet50": 5, "resnet101": 22}[architecture]
for i in range(block_count):
x = identity_block(x, 3, [256, 256, 1024], stage=4, block=chr(98 + i), train_bn=train_bn)
C4 = x
# Stage 5
if stage5:
x = conv_block(x, 3, [512, 512, 2048], stage=5, block='a', train_bn=train_bn)
x = identity_block(x, 3, [512, 512, 2048], stage=5, block='b', train_bn=train_bn)
C5 = x = identity_block(x, 3, [512, 512, 2048], stage=5, block='c', train_bn=train_bn)
else:
C5 = None
return [C1, C2, C3, C4, C5]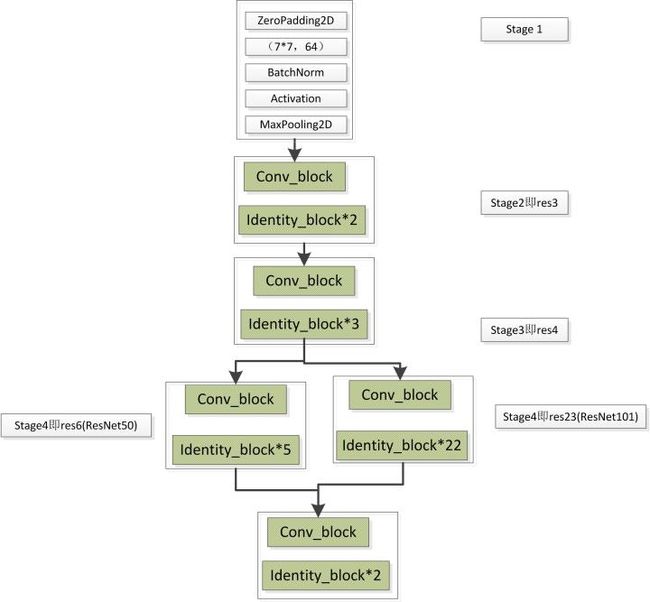
Proposal Layer
def apply_box_deltas_graph()
def apply_box_deltas_graph(boxes, deltas):
"""Applies the given deltas to the given boxes.
boxes: [N, (y1, x1, y2, x2)] boxes to update
deltas: [N, (dy, dx, log(dh), log(dw))] refinements to apply
Where N is the number of stages???
"""
# Convert to y, x, h, w
height = boxes[:, 2] - boxes[:, 0]
width = boxes[:, 3] - boxes[:, 1]
center_y = boxes[:, 0] + 0.5 * height
center_x = boxes[:, 1] + 0.5 * width
# Apply deltas
center_y += deltas[:, 0] * height
center_x += deltas[:, 1] * width
height *= tf.exp(deltas[:, 2])
width *= tf.exp(deltas[:, 3])
# Convert back to y1, x1, y2, x2
y1 = center_y - 0.5 * height
x1 = center_x - 0.5 * width
y2 = y1 + height
x2 = x1 + width
# result is a tensor
result = tf.stack([y1, x1, y2, x2], axis=1, name="apply_box_deltas_out")
return result
def clip_boxes_graph()
def clip_boxes_graph(boxes, window):
"""
boxes: [N, (y1, x1, y2, x2)]
window: [4] in the form y1, x1, y2, x2
"""
# Split
wy1, wx1, wy2, wx2 = tf.split(window, 4)
y1, x1, y2, x2 = tf.split(boxes, 4, axis=1)
# Clip
y1 = tf.maximum(tf.minimum(y1, wy2), wy1)
x1 = tf.maximum(tf.minimum(x1, wx2), wx1)
y2 = tf.maximum(tf.minimum(y2, wy2), wy1)
x2 = tf.maximum(tf.minimum(x2, wx2), wx1)
clipped = tf.concat([y1, x1, y2, x2], axis=1, name="clipped_boxes")
clipped.set_shape((clipped.shape[0], 4))
return clipped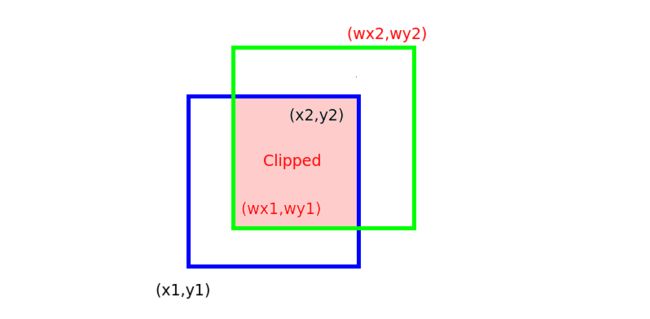
class ProposalLayer()
class ProposalLayer(KE.Layer):
"""Receives anchor scores and selects a subset to pass as proposals
to the second stage. Filtering is done based on anchor scores and
non-max suppression to remove overlaps. It also applies bounding
box refinement deltas to anchors.
Inputs:
rpn_probs: [batch, anchors, (bg prob, fg prob)]
rpn_bbox: [batch, anchors, (dy, dx, log(dh), log(dw))]
anchors: [batch, (y1, x1, y2, x2)] anchors in normalized coordinates
Returns:
Proposals in normalized coordinates [batch, rois, (y1, x1, y2, x2)]
"""
def __init__(self, proposal_count, nms_threshold, config=None, **kwargs):
super(ProposalLayer, self).__init__(**kwargs)
self.config = config
self.proposal_count = proposal_count
self.nms_threshold = nms_threshold
def call(self, inputs):
# Box Scores. Use the foreground class confidence. [Batch, num_rois, 1]
scores = inputs[0][:, :, 1]
# Box deltas [batch, num_rois, 4]
deltas = inputs[1]
deltas = deltas * np.reshape(self.config.RPN_BBOX_STD_DEV, [1, 1, 4])
# Anchors
anchors = inputs[2]
# Improve performance by trimming to top anchors by score
# and doing the rest on the smaller subset.
pre_nms_limit = tf.minimum(6000, tf.shape(anchors)[1])
ix = tf.nn.top_k(scores, pre_nms_limit, sorted=True,
name="top_anchors").indices
scores = utils.batch_slice([scores, ix], lambda x, y: tf.gather(x, y),
self.config.IMAGES_PER_GPU)
deltas = utils.batch_slice([deltas, ix], lambda x, y: tf.gather(x, y),
self.config.IMAGES_PER_GPU)
pre_nms_anchors = utils.batch_slice([anchors, ix], lambda a, x: tf.gather(a, x),
self.config.IMAGES_PER_GPU,
names=["pre_nms_anchors"])
# Apply deltas to anchors to get refined anchors.
# [batch, N, (y1, x1, y2, x2)]
boxes = utils.batch_slice([pre_nms_anchors, deltas],
lambda x, y: apply_box_deltas_graph(x, y),
self.config.IMAGES_PER_GPU,
names=["refined_anchors"])
# Clip to image boundaries. Since we're in normalized coordinates,
# clip to 0..1 range. [batch, N, (y1, x1, y2, x2)]
window = np.array([0, 0, 1, 1], dtype=np.float32)
boxes = utils.batch_slice(boxes,
lambda x: clip_boxes_graph(x, window),
self.config.IMAGES_PER_GPU,
names=["refined_anchors_clipped"])
# Filter out small boxes
# According to Xinlei Chen's paper, this reduces detection accuracy
# for small objects, so we're skipping it.
# Non-max suppression
def nms(boxes, scores):
indices = tf.image.non_max_suppression(
boxes, scores, self.proposal_count,
self.nms_threshold, name="rpn_non_max_suppression")
proposals = tf.gather(boxes, indices)
# Pad if needed
padding = tf.maximum(self.proposal_count - tf.shape(proposals)[0], 0)
proposals = tf.pad(proposals, [(0, padding), (0, 0)])
return proposals
proposals = utils.batch_slice([boxes, scores], nms,
self.config.IMAGES_PER_GPU)
return proposals
def compute_output_shape(self, input_shape):
return (None, self.proposal_count, 4)
ROIAlign Layer
def log2_graph
def log2_graph(x):
"""Implementation of Log2. TF doesn't have a native implementation."""
return tf.log(x) / tf.log(2.0)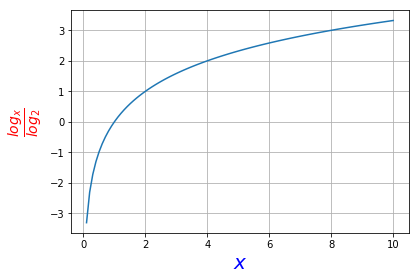
class PyramidROIAlign
class PyramidROIAlign(KE.Layer):
"""Implements ROI Pooling on multiple levels of the feature pyramid.
Params:
- pool_shape: [height, width] of the output pooled regions. Usually [7, 7]
Inputs:
- boxes: [batch, num_boxes, (y1, x1, y2, x2)] in normalized
coordinates. Possibly padded with zeros if not enough
boxes to fill the array.
- image_meta: [batch, (meta data)] Image details. See compose_image_meta()
- Feature maps: List of feature maps from different levels of the pyramid.
Each is [batch, height, width, channels]
Output:
Pooled regions in the shape: [batch, num_boxes, height, width, channels].
The width and height are those specific in the pool_shape in the layer
constructor.
"""
def __init__(self, pool_shape, **kwargs):
super(PyramidROIAlign, self).__init__(**kwargs)
self.pool_shape = tuple(pool_shape)
def call(self, inputs):
# Crop boxes [batch, num_boxes, (y1, x1, y2, x2)] in normalized coords
boxes = inputs[0]
# Image meta
# Holds details about the image. See compose_image_meta()
image_meta = inputs[1]
# Feature Maps. List of feature maps from different level of the
# feature pyramid. Each is [batch, height, width, channels]
feature_maps = inputs[2:]
# Assign each ROI to a level in the pyramid based on the ROI area.
y1, x1, y2, x2 = tf.split(boxes, 4, axis=2)
h = y2 - y1
w = x2 - x1
# Use shape of first image. Images in a batch must have the same size.
image_shape = parse_image_meta_graph(image_meta)['image_shape'][0]
# Equation 1 in the Feature Pyramid Networks paper. Account for
# the fact that our coordinates are normalized here.
# e.g. a 224x224 ROI (in pixels) maps to P4
image_area = tf.cast(image_shape[0] * image_shape[1], tf.float32)
roi_level = log2_graph(tf.sqrt(h * w) / (224.0 / tf.sqrt(image_area)))
roi_level = tf.minimum(5, tf.maximum(
2, 4 + tf.cast(tf.round(roi_level), tf.int32)))
roi_level = tf.squeeze(roi_level, 2)
# Loop through levels and apply ROI pooling to each. P2 to P5.
pooled = []
box_to_level = []
for i, level in enumerate(range(2, 6)):
ix = tf.where(tf.equal(roi_level, level))
level_boxes = tf.gather_nd(boxes, ix)
# Box indices for crop_and_resize.
box_indices = tf.cast(ix[:, 0], tf.int32)
# Keep track of which box is mapped to which level
box_to_level.append(ix)
# Stop gradient propogation to ROI proposals
level_boxes = tf.stop_gradient(level_boxes)
box_indices = tf.stop_gradient(box_indices)
# Crop and Resize
# From Mask R-CNN paper: "We sample four regular locations, so
# that we can evaluate either max or average pooling. In fact,
# interpolating only a single value at each bin center (without
# pooling) is nearly as effective."
#
# Here we use the simplified approach of a single value per bin,
# which is how it's done in tf.crop_and_resize()
# Result: [batch * num_boxes, pool_height, pool_width, channels]
pooled.append(tf.image.crop_and_resize(
feature_maps[i], level_boxes, box_indices, self.pool_shape,
method="bilinear"))
# Pack pooled features into one tensor
pooled = tf.concat(pooled, axis=0)
# Pack box_to_level mapping into one array and add another
# column representing the order of pooled boxes
box_to_level = tf.concat(box_to_level, axis=0)
box_range = tf.expand_dims(tf.range(tf.shape(box_to_level)[0]), 1)
box_to_level = tf.concat([tf.cast(box_to_level, tf.int32), box_range],
axis=1)
# Rearrange pooled features to match the order of the original boxes
# Sort box_to_level by batch then box index
# TF doesn't have a way to sort by two columns, so merge them and sort.
sorting_tensor = box_to_level[:, 0] * 100000 + box_to_level[:, 1]
ix = tf.nn.top_k(sorting_tensor, k=tf.shape(
box_to_level)[0]).indices[::-1]
ix = tf.gather(box_to_level[:, 2], ix)
pooled = tf.gather(pooled, ix)
# Re-add the batch dimension
pooled = tf.expand_dims(pooled, 0)
return pooled
def compute_output_shape(self, input_shape):
return input_shape[0][:2] + self.pool_shape + (input_shape[2][-1], )Detection Target Layer
Detection Layer
Region Proposal Network (RPN)
Feature Pyramid Network Heads
Loss Functions
Data Generator
MaskRCNN Class
class MaskRCNN():
"""Encapsulates the Mask RCNN model functionality.
The actual Keras model is in the keras_model property.
"""
def __init__(self, mode, config, model_dir):
"""
mode: Either "training" or "inference"
config: A Sub-class of the Config class
model_dir: Directory to save training logs and trained weights
"""
assert mode in ['training', 'inference']
self.mode = mode
self.config = config
self.model_dir = model_dir
self.set_log_dir()
self.keras_model = self.build(mode=mode, config=config)
def build(self, mode, config):
"""Build Mask R-CNN architecture.
input_shape: The shape of the input image.
mode: Either "training" or "inference". The inputs and
outputs of the model differ accordingly.
"""
assert mode in ['training', 'inference']
# Image size must be dividable by 2 multiple times
h, w = config.IMAGE_SHAPE[:2]
if h / 2**6 != int(h / 2**6) or w / 2**6 != int(w / 2**6):
raise Exception("Image size must be dividable by 2 at least 6 times "
"to avoid fractions when downscaling and upscaling."
"For example, use 256, 320, 384, 448, 512, ... etc. ")
# Inputs
input_image = KL.Input(
shape=[None, None, 3], name="input_image")
input_image_meta = KL.Input(shape=[config.IMAGE_META_SIZE],
name="input_image_meta")
if mode == "training":
# RPN GT
input_rpn_match = KL.Input(
shape=[None, 1], name="input_rpn_match", dtype=tf.int32)
input_rpn_bbox = KL.Input(
shape=[None, 4], name="input_rpn_bbox", dtype=tf.float32)
# Detection GT (class IDs, bounding boxes, and masks)
# 1. GT Class IDs (zero padded)
input_gt_class_ids = KL.Input(
shape=[None], name="input_gt_class_ids", dtype=tf.int32)
# 2. GT Boxes in pixels (zero padded)
# [batch, MAX_GT_INSTANCES, (y1, x1, y2, x2)] in image coordinates
input_gt_boxes = KL.Input(
shape=[None, 4], name="input_gt_boxes", dtype=tf.float32)
# Normalize coordinates
gt_boxes = KL.Lambda(lambda x: norm_boxes_graph(
x, K.shape(input_image)[1:3]))(input_gt_boxes)
# 3. GT Masks (zero padded)
# [batch, height, width, MAX_GT_INSTANCES]
if config.USE_MINI_MASK:
input_gt_masks = KL.Input(
shape=[config.MINI_MASK_SHAPE[0],
config.MINI_MASK_SHAPE[1], None],
name="input_gt_masks", dtype=bool)
else:
input_gt_masks = KL.Input(
shape=[config.IMAGE_SHAPE[0], config.IMAGE_SHAPE[1], None],
name="input_gt_masks", dtype=bool)
elif mode == "inference":
# Anchors in normalized coordinates
input_anchors = KL.Input(shape=[None, 4], name="input_anchors")
# Build the shared convolutional layers.
# Bottom-up Layers
# Returns a list of the last layers of each stage, 5 in total.
# Don't create the thead (stage 5), so we pick the 4th item in the list.
if callable(config.BACKBONE):
_, C2, C3, C4, C5 = config.BACKBONE(input_image, stage5=True,
train_bn=config.TRAIN_BN)
else:
_, C2, C3, C4, C5 = resnet_graph(input_image, config.BACKBONE,
stage5=True, train_bn=config.TRAIN_BN)
# Top-down Layers
# TODO: add assert to varify feature map sizes match what's in config
P5 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c5p5')(C5)
P4 = KL.Add(name="fpn_p4add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p5upsampled")(P5),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c4p4')(C4)])
P3 = KL.Add(name="fpn_p3add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p4upsampled")(P4),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c3p3')(C3)])
P2 = KL.Add(name="fpn_p2add")([
KL.UpSampling2D(size=(2, 2), name="fpn_p3upsampled")(P3),
KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (1, 1), name='fpn_c2p2')(C2)])
# Attach 3x3 conv to all P layers to get the final feature maps.
P2 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p2")(P2)
P3 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p3")(P3)
P4 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p4")(P4)
P5 = KL.Conv2D(config.TOP_DOWN_PYRAMID_SIZE, (3, 3), padding="SAME", name="fpn_p5")(P5)
# P6 is used for the 5th anchor scale in RPN. Generated by
# subsampling from P5 with stride of 2.
P6 = KL.MaxPooling2D(pool_size=(1, 1), strides=2, name="fpn_p6")(P5)
# Note that P6 is used in RPN, but not in the classifier heads.
rpn_feature_maps = [P2, P3, P4, P5, P6]
mrcnn_feature_maps = [P2, P3, P4, P5]
# Anchors
if mode == "training":
anchors = self.get_anchors(config.IMAGE_SHAPE)
# Duplicate across the batch dimension because Keras requires it
# TODO: can this be optimized to avoid duplicating the anchors?
anchors = np.broadcast_to(anchors, (config.BATCH_SIZE,) + anchors.shape)
# A hack to get around Keras's bad support for constants
anchors = KL.Lambda(lambda x: tf.Variable(anchors), name="anchors")(input_image)
else:
anchors = input_anchors
# RPN Model
rpn = build_rpn_model(config.RPN_ANCHOR_STRIDE,
len(config.RPN_ANCHOR_RATIOS), config.TOP_DOWN_PYRAMID_SIZE)
# Loop through pyramid layers
layer_outputs = [] # list of lists
for p in rpn_feature_maps:
layer_outputs.append(rpn([p]))
# Concatenate layer outputs
# Convert from list of lists of level outputs to list of lists
# of outputs across levels.
# e.g. [[a1, b1, c1], [a2, b2, c2]] => [[a1, a2], [b1, b2], [c1, c2]]
output_names = ["rpn_class_logits", "rpn_class", "rpn_bbox"]
outputs = list(zip(*layer_outputs))
outputs = [KL.Concatenate(axis=1, name=n)(list(o))
for o, n in zip(outputs, output_names)]
rpn_class_logits, rpn_class, rpn_bbox = outputs
# Generate proposals
# Proposals are [batch, N, (y1, x1, y2, x2)] in normalized coordinates
# and zero padded.
proposal_count = config.POST_NMS_ROIS_TRAINING if mode == "training"\
else config.POST_NMS_ROIS_INFERENCE
rpn_rois = ProposalLayer(
proposal_count=proposal_count,
nms_threshold=config.RPN_NMS_THRESHOLD,
name="ROI",
config=config)([rpn_class, rpn_bbox, anchors])
if mode == "training":
# Class ID mask to mark class IDs supported by the dataset the image
# came from.
active_class_ids = KL.Lambda(
lambda x: parse_image_meta_graph(x)["active_class_ids"]
)(input_image_meta)
if not config.USE_RPN_ROIS:
# Ignore predicted ROIs and use ROIs provided as an input.
input_rois = KL.Input(shape=[config.POST_NMS_ROIS_TRAINING, 4],
name="input_roi", dtype=np.int32)
# Normalize coordinates
target_rois = KL.Lambda(lambda x: norm_boxes_graph(
x, K.shape(input_image)[1:3]))(input_rois)
else:
target_rois = rpn_rois
# Generate detection targets
# Subsamples proposals and generates target outputs for training
# Note that proposal class IDs, gt_boxes, and gt_masks are zero
# padded. Equally, returned rois and targets are zero padded.
rois, target_class_ids, target_bbox, target_mask =\
DetectionTargetLayer(config, name="proposal_targets")([
target_rois, input_gt_class_ids, gt_boxes, input_gt_masks])
# Network Heads
# TODO: verify that this handles zero padded ROIs
mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\
fpn_classifier_graph(rois, mrcnn_feature_maps, input_image_meta,
config.POOL_SIZE, config.NUM_CLASSES,
train_bn=config.TRAIN_BN,
fc_layers_size=config.FPN_CLASSIF_FC_LAYERS_SIZE)
mrcnn_mask = build_fpn_mask_graph(rois, mrcnn_feature_maps,
input_image_meta,
config.MASK_POOL_SIZE,
config.NUM_CLASSES,
train_bn=config.TRAIN_BN)
# TODO: clean up (use tf.identify if necessary)
output_rois = KL.Lambda(lambda x: x * 1, name="output_rois")(rois)
# Losses
rpn_class_loss = KL.Lambda(lambda x: rpn_class_loss_graph(*x), name="rpn_class_loss")(
[input_rpn_match, rpn_class_logits])
rpn_bbox_loss = KL.Lambda(lambda x: rpn_bbox_loss_graph(config, *x), name="rpn_bbox_loss")(
[input_rpn_bbox, input_rpn_match, rpn_bbox])
class_loss = KL.Lambda(lambda x: mrcnn_class_loss_graph(*x), name="mrcnn_class_loss")(
[target_class_ids, mrcnn_class_logits, active_class_ids])
bbox_loss = KL.Lambda(lambda x: mrcnn_bbox_loss_graph(*x), name="mrcnn_bbox_loss")(
[target_bbox, target_class_ids, mrcnn_bbox])
mask_loss = KL.Lambda(lambda x: mrcnn_mask_loss_graph(*x), name="mrcnn_mask_loss")(
[target_mask, target_class_ids, mrcnn_mask])
# Model
inputs = [input_image, input_image_meta,
input_rpn_match, input_rpn_bbox, input_gt_class_ids, input_gt_boxes, input_gt_masks]
if not config.USE_RPN_ROIS:
inputs.append(input_rois)
outputs = [rpn_class_logits, rpn_class, rpn_bbox,
mrcnn_class_logits, mrcnn_class, mrcnn_bbox, mrcnn_mask,
rpn_rois, output_rois,
rpn_class_loss, rpn_bbox_loss, class_loss, bbox_loss, mask_loss]
model = KM.Model(inputs, outputs, name='mask_rcnn')
else:
# Network Heads
# Proposal classifier and BBox regressor heads
mrcnn_class_logits, mrcnn_class, mrcnn_bbox =\
fpn_classifier_graph(rpn_rois, mrcnn_feature_maps, input_image_meta,
config.POOL_SIZE, config.NUM_CLASSES,
train_bn=config.TRAIN_BN,
fc_layers_size=config.FPN_CLASSIF_FC_LAYERS_SIZE)
# Detections
# output is [batch, num_detections, (y1, x1, y2, x2, class_id, score)] in
# normalized coordinates
detections = DetectionLayer(config, name="mrcnn_detection")(
[rpn_rois, mrcnn_class, mrcnn_bbox, input_image_meta])
# Create masks for detections
detection_boxes = KL.Lambda(lambda x: x[..., :4])(detections)
mrcnn_mask = build_fpn_mask_graph(detection_boxes, mrcnn_feature_maps,
input_image_meta,
config.MASK_POOL_SIZE,
config.NUM_CLASSES,
train_bn=config.TRAIN_BN)
model = KM.Model([input_image, input_image_meta, input_anchors],
[detections, mrcnn_class, mrcnn_bbox,
mrcnn_mask, rpn_rois, rpn_class, rpn_bbox],
name='mask_rcnn')
# Add multi-GPU support.
if config.GPU_COUNT > 1:
from mrcnn.parallel_model import ParallelModel
model = ParallelModel(model, config.GPU_COUNT)
return model
def find_last(self):
"""Finds the last checkpoint file of the last trained model in the
model directory.
Returns:
The path of the last checkpoint file
"""
# Get directory names. Each directory corresponds to a model
dir_names = next(os.walk(self.model_dir))[1]
key = self.config.NAME.lower()
dir_names = filter(lambda f: f.startswith(key), dir_names)
dir_names = sorted(dir_names)
if not dir_names:
import errno
raise FileNotFoundError(
errno.ENOENT,
"Could not find model directory under {}".format(self.model_dir))
# Pick last directory
dir_name = os.path.join(self.model_dir, dir_names[-1])
# Find the last checkpoint
checkpoints = next(os.walk(dir_name))[2]
checkpoints = filter(lambda f: f.startswith("mask_rcnn"), checkpoints)
checkpoints = sorted(checkpoints)
if not checkpoints:
import errno
raise FileNotFoundError(
errno.ENOENT, "Could not find weight files in {}".format(dir_name))
checkpoint = os.path.join(dir_name, checkpoints[-1])
return checkpoint
def load_weights(self, filepath, by_name=False, exclude=None):
"""Modified version of the corresponding Keras function with
the addition of multi-GPU support and the ability to exclude
some layers from loading.
exclude: list of layer names to exclude
"""
import h5py
# Conditional import to support versions of Keras before 2.2
# TODO: remove in about 6 months (end of 2018)
try:
from keras.engine import saving
except ImportError:
# Keras before 2.2 used the 'topology' namespace.
from keras.engine import topology as saving
if exclude:
by_name = True
if h5py is None:
raise ImportError('`load_weights` requires h5py.')
f = h5py.File(filepath, mode='r')
if 'layer_names' not in f.attrs and 'model_weights' in f:
f = f['model_weights']
# In multi-GPU training, we wrap the model. Get layers
# of the inner model because they have the weights.
keras_model = self.keras_model
layers = keras_model.inner_model.layers if hasattr(keras_model, "inner_model")\
else keras_model.layers
# Exclude some layers
if exclude:
layers = filter(lambda l: l.name not in exclude, layers)
if by_name:
saving.load_weights_from_hdf5_group_by_name(f, layers)
else:
saving.load_weights_from_hdf5_group(f, layers)
if hasattr(f, 'close'):
f.close()
# Update the log directory
self.set_log_dir(filepath)
def get_imagenet_weights(self):
"""Downloads ImageNet trained weights from Keras.
Returns path to weights file.
"""
from keras.utils.data_utils import get_file
TF_WEIGHTS_PATH_NO_TOP = 'https://github.com/fchollet/deep-learning-models/'\
'releases/download/v0.2/'\
'resnet50_weights_tf_dim_ordering_tf_kernels_notop.h5'
weights_path = get_file('resnet50_weights_tf_dim_ordering_tf_kernels_notop.h5',
TF_WEIGHTS_PATH_NO_TOP,
cache_subdir='models',
md5_hash='a268eb855778b3df3c7506639542a6af')
return weights_path
def compile(self, learning_rate, momentum):
"""Gets the model ready for training. Adds losses, regularization, and
metrics. Then calls the Keras compile() function.
"""
# Optimizer object
optimizer = keras.optimizers.SGD(
lr=learning_rate, momentum=momentum,
clipnorm=self.config.GRADIENT_CLIP_NORM)
# Add Losses
# First, clear previously set losses to avoid duplication
self.keras_model._losses = []
self.keras_model._per_input_losses = {}
loss_names = [
"rpn_class_loss", "rpn_bbox_loss",
"mrcnn_class_loss", "mrcnn_bbox_loss", "mrcnn_mask_loss"]
for name in loss_names:
layer = self.keras_model.get_layer(name)
if layer.output in self.keras_model.losses:
continue
loss = (
tf.reduce_mean(layer.output, keep_dims=True)
* self.config.LOSS_WEIGHTS.get(name, 1.))
self.keras_model.add_loss(loss)
# Add L2 Regularization
# Skip gamma and beta weights of batch normalization layers.
reg_losses = [
keras.regularizers.l2(self.config.WEIGHT_DECAY)(w) / tf.cast(tf.size(w), tf.float32)
for w in self.keras_model.trainable_weights
if 'gamma' not in w.name and 'beta' not in w.name]
self.keras_model.add_loss(tf.add_n(reg_losses))
# Compile
self.keras_model.compile(
optimizer=optimizer,
loss=[None] * len(self.keras_model.outputs))
# Add metrics for losses
for name in loss_names:
if name in self.keras_model.metrics_names:
continue
layer = self.keras_model.get_layer(name)
self.keras_model.metrics_names.append(name)
loss = (
tf.reduce_mean(layer.output, keep_dims=True)
* self.config.LOSS_WEIGHTS.get(name, 1.))
self.keras_model.metrics_tensors.append(loss)
def set_trainable(self, layer_regex, keras_model=None, indent=0, verbose=1):
"""Sets model layers as trainable if their names match
the given regular expression.
"""
# Print message on the first call (but not on recursive calls)
if verbose > 0 and keras_model is None:
log("Selecting layers to train")
keras_model = keras_model or self.keras_model
# In multi-GPU training, we wrap the model. Get layers
# of the inner model because they have the weights.
layers = keras_model.inner_model.layers if hasattr(keras_model, "inner_model")\
else keras_model.layers
for layer in layers:
# Is the layer a model?
if layer.__class__.__name__ == 'Model':
print("In model: ", layer.name)
self.set_trainable(
layer_regex, keras_model=layer, indent=indent + 4)
continue
if not layer.weights:
continue
# Is it trainable?
trainable = bool(re.fullmatch(layer_regex, layer.name))
# Update layer. If layer is a container, update inner layer.
if layer.__class__.__name__ == 'TimeDistributed':
layer.layer.trainable = trainable
else:
layer.trainable = trainable
# Print trainable layer names
if trainable and verbose > 0:
log("{}{:20} ({})".format(" " * indent, layer.name,
layer.__class__.__name__))
def set_log_dir(self, model_path=None):
"""Sets the model log directory and epoch counter.
model_path: If None, or a format different from what this code uses
then set a new log directory and start epochs from 0. Otherwise,
extract the log directory and the epoch counter from the file
name.
"""
# Set date and epoch counter as if starting a new model
self.epoch = 0
now = datetime.datetime.now()
# If we have a model path with date and epochs use them
if model_path:
# Continue from we left of. Get epoch and date from the file name
# A sample model path might look like:
# /path/to/logs/coco20171029T2315/mask_rcnn_coco_0001.h5
regex = r".*/[\w-]+(\d{4})(\d{2})(\d{2})T(\d{2})(\d{2})/mask\_rcnn\_[\w-]+(\d{4})\.h5"
m = re.match(regex, model_path)
if m:
now = datetime.datetime(int(m.group(1)), int(m.group(2)), int(m.group(3)),
int(m.group(4)), int(m.group(5)))
# Epoch number in file is 1-based, and in Keras code it's 0-based.
# So, adjust for that then increment by one to start from the next epoch
self.epoch = int(m.group(6)) - 1 + 1
print('Re-starting from epoch %d' % self.epoch)
# Directory for training logs
self.log_dir = os.path.join(self.model_dir, "{}{:%Y%m%dT%H%M}".format(
self.config.NAME.lower(), now))
# Create log_dir if not exists
if not os.path.exists(self.log_dir):
os.makedirs(self.log_dir)
# Path to save after each epoch. Include placeholders that get filled by Keras.
self.checkpoint_path = os.path.join(self.log_dir, "mask_rcnn_{}_*epoch*.h5".format(
self.config.NAME.lower()))
self.checkpoint_path = self.checkpoint_path.replace(
"*epoch*", "{epoch:04d}")
def train(self, train_dataset, val_dataset, learning_rate, epochs, layers,
augmentation=None, custom_callbacks=None, no_augmentation_sources=None):
"""Train the model.
train_dataset, val_dataset: Training and validation Dataset objects.
learning_rate: The learning rate to train with
epochs: Number of training epochs. Note that previous training epochs
are considered to be done alreay, so this actually determines
the epochs to train in total rather than in this particaular
call.
layers: Allows selecting wich layers to train. It can be:
- A regular expression to match layer names to train
- One of these predefined values:
heads: The RPN, classifier and mask heads of the network
all: All the layers
3+: Train Resnet stage 3 and up
4+: Train Resnet stage 4 and up
5+: Train Resnet stage 5 and up
augmentation: Optional. An imgaug (https://github.com/aleju/imgaug)
augmentation. For example, passing imgaug.augmenters.Fliplr(0.5)
flips images right/left 50% of the time. You can pass complex
augmentations as well. This augmentation applies 50% of the
time, and when it does it flips images right/left half the time
and adds a Gaussian blur with a random sigma in range 0 to 5.
augmentation = imgaug.augmenters.Sometimes(0.5, [
imgaug.augmenters.Fliplr(0.5),
imgaug.augmenters.GaussianBlur(sigma=(0.0, 5.0))
])
custom_callbacks: Optional. Add custom callbacks to be called
with the keras fit_generator method. Must be list of type keras.callbacks.
no_augmentation_sources: Optional. List of sources to exclude for
augmentation. A source is string that identifies a dataset and is
defined in the Dataset class.
"""
assert self.mode == "training", "Create model in training mode."
# Pre-defined layer regular expressions
layer_regex = {
# all layers but the backbone
"heads": r"(mrcnn\_.*)|(rpn\_.*)|(fpn\_.*)",
# From a specific Resnet stage and up
"3+": r"(res3.*)|(bn3.*)|(res4.*)|(bn4.*)|(res5.*)|(bn5.*)|(mrcnn\_.*)|(rpn\_.*)|(fpn\_.*)",
"4+": r"(res4.*)|(bn4.*)|(res5.*)|(bn5.*)|(mrcnn\_.*)|(rpn\_.*)|(fpn\_.*)",
"5+": r"(res5.*)|(bn5.*)|(mrcnn\_.*)|(rpn\_.*)|(fpn\_.*)",
# All layers
"all": ".*",
}
if layers in layer_regex.keys():
layers = layer_regex[layers]
# Data generators
train_generator = data_generator(train_dataset, self.config, shuffle=True,
augmentation=augmentation,
batch_size=self.config.BATCH_SIZE,
no_augmentation_sources=no_augmentation_sources)
val_generator = data_generator(val_dataset, self.config, shuffle=True,
batch_size=self.config.BATCH_SIZE)
# Callbacks
callbacks = [
keras.callbacks.TensorBoard(log_dir=self.log_dir,
histogram_freq=0, write_graph=True, write_images=False),
keras.callbacks.ModelCheckpoint(self.checkpoint_path,
verbose=0, save_weights_only=True),
]
# Add custom callbacks to the list
if custom_callbacks:
callbacks += custom_callbacks
# Train
log("\nStarting at epoch {}. LR={}\n".format(self.epoch, learning_rate))
log("Checkpoint Path: {}".format(self.checkpoint_path))
self.set_trainable(layers)
self.compile(learning_rate, self.config.LEARNING_MOMENTUM)
# Work-around for Windows: Keras fails on Windows when using
# multiprocessing workers. See discussion here:
# https://github.com/matterport/Mask_RCNN/issues/13#issuecomment-353124009
if os.name is 'nt':
workers = 0
else:
workers = multiprocessing.cpu_count()
self.keras_model.fit_generator(
train_generator,
initial_epoch=self.epoch,
epochs=epochs,
steps_per_epoch=self.config.STEPS_PER_EPOCH,
callbacks=callbacks,
validation_data=val_generator,
validation_steps=self.config.VALIDATION_STEPS,
max_queue_size=100,
workers=workers,
use_multiprocessing=True,
)
self.epoch = max(self.epoch, epochs)
def mold_inputs(self, images):
"""Takes a list of images and modifies them to the format expected
as an input to the neural network.
images: List of image matrices [height,width,depth]. Images can have
different sizes.
Returns 3 Numpy matrices:
molded_images: [N, h, w, 3]. Images resized and normalized.
image_metas: [N, length of meta data]. Details about each image.
windows: [N, (y1, x1, y2, x2)]. The portion of the image that has the
original image (padding excluded).
"""
molded_images = []
image_metas = []
windows = []
for image in images:
# Resize image
# TODO: move resizing to mold_image()
molded_image, window, scale, padding, crop = utils.resize_image(
image,
min_dim=self.config.IMAGE_MIN_DIM,
min_scale=self.config.IMAGE_MIN_SCALE,
max_dim=self.config.IMAGE_MAX_DIM,
mode=self.config.IMAGE_RESIZE_MODE)
molded_image = mold_image(molded_image, self.config)
# Build image_meta
image_meta = compose_image_meta(
0, image.shape, molded_image.shape, window, scale,
np.zeros([self.config.NUM_CLASSES], dtype=np.int32))
# Append
molded_images.append(molded_image)
windows.append(window)
image_metas.append(image_meta)
# Pack into arrays
molded_images = np.stack(molded_images)
image_metas = np.stack(image_metas)
windows = np.stack(windows)
return molded_images, image_metas, windows
def unmold_detections(self, detections, mrcnn_mask, original_image_shape,
image_shape, window):
"""Reformats the detections of one image from the format of the neural
network output to a format suitable for use in the rest of the
application.
detections: [N, (y1, x1, y2, x2, class_id, score)] in normalized coordinates
mrcnn_mask: [N, height, width, num_classes]
original_image_shape: [H, W, C] Original image shape before resizing
image_shape: [H, W, C] Shape of the image after resizing and padding
window: [y1, x1, y2, x2] Pixel coordinates of box in the image where the real
image is excluding the padding.
Returns:
boxes: [N, (y1, x1, y2, x2)] Bounding boxes in pixels
class_ids: [N] Integer class IDs for each bounding box
scores: [N] Float probability scores of the class_id
masks: [height, width, num_instances] Instance masks
"""
# How many detections do we have?
# Detections array is padded with zeros. Find the first class_id == 0.
zero_ix = np.where(detections[:, 4] == 0)[0]
N = zero_ix[0] if zero_ix.shape[0] > 0 else detections.shape[0]
# Extract boxes, class_ids, scores, and class-specific masks
boxes = detections[:N, :4]
class_ids = detections[:N, 4].astype(np.int32)
scores = detections[:N, 5]
masks = mrcnn_mask[np.arange(N), :, :, class_ids]
# Translate normalized coordinates in the resized image to pixel
# coordinates in the original image before resizing
window = utils.norm_boxes(window, image_shape[:2])
wy1, wx1, wy2, wx2 = window
shift = np.array([wy1, wx1, wy1, wx1])
wh = wy2 - wy1 # window height
ww = wx2 - wx1 # window width
scale = np.array([wh, ww, wh, ww])
# Convert boxes to normalized coordinates on the window
boxes = np.divide(boxes - shift, scale)
# Convert boxes to pixel coordinates on the original image
boxes = utils.denorm_boxes(boxes, original_image_shape[:2])
# Filter out detections with zero area. Happens in early training when
# network weights are still random
exclude_ix = np.where(
(boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]) <= 0)[0]
if exclude_ix.shape[0] > 0:
boxes = np.delete(boxes, exclude_ix, axis=0)
class_ids = np.delete(class_ids, exclude_ix, axis=0)
scores = np.delete(scores, exclude_ix, axis=0)
masks = np.delete(masks, exclude_ix, axis=0)
N = class_ids.shape[0]
# Resize masks to original image size and set boundary threshold.
full_masks = []
for i in range(N):
# Convert neural network mask to full size mask
full_mask = utils.unmold_mask(masks[i], boxes[i], original_image_shape)
full_masks.append(full_mask)
full_masks = np.stack(full_masks, axis=-1)\
if full_masks else np.empty(original_image_shape[:2] + (0,))
return boxes, class_ids, scores, full_masks
def detect(self, images, verbose=0):
"""Runs the detection pipeline.
images: List of images, potentially of different sizes.
Returns a list of dicts, one dict per image. The dict contains:
rois: [N, (y1, x1, y2, x2)] detection bounding boxes
class_ids: [N] int class IDs
scores: [N] float probability scores for the class IDs
masks: [H, W, N] instance binary masks
"""
assert self.mode == "inference", "Create model in inference mode."
assert len(
images) == self.config.BATCH_SIZE, "len(images) must be equal to BATCH_SIZE"
if verbose:
log("Processing {} images".format(len(images)))
for image in images:
log("image", image)
# Mold inputs to format expected by the neural network
molded_images, image_metas, windows = self.mold_inputs(images)
# Validate image sizes
# All images in a batch MUST be of the same size
image_shape = molded_images[0].shape
for g in molded_images[1:]:
assert g.shape == image_shape,\
"After resizing, all images must have the same size. Check IMAGE_RESIZE_MODE and image sizes."
# Anchors
anchors = self.get_anchors(image_shape)
# Duplicate across the batch dimension because Keras requires it
# TODO: can this be optimized to avoid duplicating the anchors?
anchors = np.broadcast_to(anchors, (self.config.BATCH_SIZE,) + anchors.shape)
if verbose:
log("molded_images", molded_images)
log("image_metas", image_metas)
log("anchors", anchors)
# Run object detection
detections, _, _, mrcnn_mask, _, _, _ =\
self.keras_model.predict([molded_images, image_metas, anchors], verbose=0)
# Process detections
results = []
for i, image in enumerate(images):
final_rois, final_class_ids, final_scores, final_masks =\
self.unmold_detections(detections[i], mrcnn_mask[i],
image.shape, molded_images[i].shape,
windows[i])
results.append({
"rois": final_rois,
"class_ids": final_class_ids,
"scores": final_scores,
"masks": final_masks,
})
return results
def detect_molded(self, molded_images, image_metas, verbose=0):
"""Runs the detection pipeline, but expect inputs that are
molded already. Used mostly for debugging and inspecting
the model.
molded_images: List of images loaded using load_image_gt()
image_metas: image meta data, also returned by load_image_gt()
Returns a list of dicts, one dict per image. The dict contains:
rois: [N, (y1, x1, y2, x2)] detection bounding boxes
class_ids: [N] int class IDs
scores: [N] float probability scores for the class IDs
masks: [H, W, N] instance binary masks
"""
assert self.mode == "inference", "Create model in inference mode."
assert len(molded_images) == self.config.BATCH_SIZE,\
"Number of images must be equal to BATCH_SIZE"
if verbose:
log("Processing {} images".format(len(molded_images)))
for image in molded_images:
log("image", image)
# Validate image sizes
# All images in a batch MUST be of the same size
image_shape = molded_images[0].shape
for g in molded_images[1:]:
assert g.shape == image_shape, "Images must have the same size"
# Anchors
anchors = self.get_anchors(image_shape)
# Duplicate across the batch dimension because Keras requires it
# TODO: can this be optimized to avoid duplicating the anchors?
anchors = np.broadcast_to(anchors, (self.config.BATCH_SIZE,) + anchors.shape)
if verbose:
log("molded_images", molded_images)
log("image_metas", image_metas)
log("anchors", anchors)
# Run object detection
detections, _, _, mrcnn_mask, _, _, _ =\
self.keras_model.predict([molded_images, image_metas, anchors], verbose=0)
# Process detections
results = []
for i, image in enumerate(molded_images):
window = [0, 0, image.shape[0], image.shape[1]]
final_rois, final_class_ids, final_scores, final_masks =\
self.unmold_detections(detections[i], mrcnn_mask[i],
image.shape, molded_images[i].shape,
window)
results.append({
"rois": final_rois,
"class_ids": final_class_ids,
"scores": final_scores,
"masks": final_masks,
})
return results
def get_anchors(self, image_shape):
"""Returns anchor pyramid for the given image size."""
backbone_shapes = compute_backbone_shapes(self.config, image_shape)
# Cache anchors and reuse if image shape is the same
if not hasattr(self, "_anchor_cache"):
self._anchor_cache = {}
if not tuple(image_shape) in self._anchor_cache:
# Generate Anchors
a = utils.generate_pyramid_anchors(
self.config.RPN_ANCHOR_SCALES,
self.config.RPN_ANCHOR_RATIOS,
backbone_shapes,
self.config.BACKBONE_STRIDES,
self.config.RPN_ANCHOR_STRIDE)
# Keep a copy of the latest anchors in pixel coordinates because
# it's used in inspect_model notebooks.
# TODO: Remove this after the notebook are refactored to not use it
self.anchors = a
# Normalize coordinates
self._anchor_cache[tuple(image_shape)] = utils.norm_boxes(a, image_shape[:2])
return self._anchor_cache[tuple(image_shape)]
def ancestor(self, tensor, name, checked=None):
"""Finds the ancestor of a TF tensor in the computation graph.
tensor: TensorFlow symbolic tensor.
name: Name of ancestor tensor to find
checked: For internal use. A list of tensors that were already
searched to avoid loops in traversing the graph.
"""
checked = checked if checked is not None else []
# Put a limit on how deep we go to avoid very long loops
if len(checked) > 500:
return None
# Convert name to a regex and allow matching a number prefix
# because Keras adds them automatically
if isinstance(name, str):
name = re.compile(name.replace("/", r"(\_\d+)*/"))
parents = tensor.op.inputs
for p in parents:
if p in checked:
continue
if bool(re.fullmatch(name, p.name)):
return p
checked.append(p)
a = self.ancestor(p, name, checked)
if a is not None:
return a
return None
def find_trainable_layer(self, layer):
"""If a layer is encapsulated by another layer, this function
digs through the encapsulation and returns the layer that holds
the weights.
"""
if layer.__class__.__name__ == 'TimeDistributed':
return self.find_trainable_layer(layer.layer)
return layer
def get_trainable_layers(self):
"""Returns a list of layers that have weights."""
layers = []
# Loop through all layers
for l in self.keras_model.layers:
# If layer is a wrapper, find inner trainable layer
l = self.find_trainable_layer(l)
# Include layer if it has weights
if l.get_weights():
layers.append(l)
return layers
def run_graph(self, images, outputs, image_metas=None):
"""Runs a sub-set of the computation graph that computes the given
outputs.
image_metas: If provided, the images are assumed to be already
molded (i.e. resized, padded, and normalized)
outputs: List of tuples (name, tensor) to compute. The tensors are
symbolic TensorFlow tensors and the names are for easy tracking.
Returns an ordered dict of results. Keys are the names received in the
input and values are Numpy arrays.
"""
model = self.keras_model
# Organize desired outputs into an ordered dict
outputs = OrderedDict(outputs)
for o in outputs.values():
assert o is not None
# Build a Keras function to run parts of the computation graph
inputs = model.inputs
if model.uses_learning_phase and not isinstance(K.learning_phase(), int):
inputs += [K.learning_phase()]
kf = K.function(model.inputs, list(outputs.values()))
# Prepare inputs
if image_metas is None:
molded_images, image_metas, _ = self.mold_inputs(images)
else:
molded_images = images
image_shape = molded_images[0].shape
# Anchors
anchors = self.get_anchors(image_shape)
# Duplicate across the batch dimension because Keras requires it
# TODO: can this be optimized to avoid duplicating the anchors?
anchors = np.broadcast_to(anchors, (self.config.BATCH_SIZE,) + anchors.shape)
model_in = [molded_images, image_metas, anchors]
# Run inference
if model.uses_learning_phase and not isinstance(K.learning_phase(), int):
model_in.append(0.)
outputs_np = kf(model_in)
# Pack the generated Numpy arrays into a a dict and log the results.
outputs_np = OrderedDict([(k, v)
for k, v in zip(outputs.keys(), outputs_np)])
for k, v in outputs_np.items():
log(k, v)
return outputs_np