- 树莓派 5 - Raspberry Pi OS 新版本 Bookworm(书虫)
kuan_li_lyg
树莓派&Jetson教程机器人stm32嵌入式硬件自动驾驶ROS树莓派raspberrypi
文章目录在这里插入图片描述版本说明前言二、PipeWire三、Networking四、Firefox五、Documentation六、What’smissing? 新版本下载地址为:https://www.raspberrypi.com/software/operating-systems/版本说明 2023-10-10:基于Debianbookworm版本支持树莓派5在RaspberryPi4和
- 树莓派 —— 在树莓派4b板卡下编译FFmpeg源码,支持硬件编解码器(mmal或openMax硬编解码加速)
信必诺
FFmpeg树莓派FFmpeg编译源码mmalopenMax树莓派树莓派4b
FFmpeg相关音视频技术、疑难杂症文章合集(掌握后可自封大侠⓿_⓿)(记得收藏,持续更新中…) 正文 1、准备工作 (1)树莓派烧录RaspberryPi系统 (2)树莓派配置固定IP(文末) (3)xshell连接树莓派 (4)
- ARMv7单核CPU上SWI(软件中断)验证
liuluyang530
FPGA验证软件中断armcpu异常处理
在ARMv7单核CPU上验证SWI(软件中断)功能需结合硬件初始化、异常向量表配置、处理函数实现及调试手段,以下是详细验证方案:一、验证环境搭建1.硬件准备开发板:搭载ARMv7单核CPU(如Cortex-A7/A8/A9)的嵌入式板(如树莓派、BeagleBone或自定义板)。调试工具:JTAG/SWD调试器(如J-Link、ST-Link)用于单步调试和寄存器查看。串口工具(如UART转USB
- 【Note】Linux Kernel 主题学习之“完整的嵌入式 Linux 环境、构建工具、编译工具链、CPU 架构”
CodeWithMe
读书笔记linuxlinux学习架构
LinuxKernel主题学习之“完整的嵌入式Linux环境、构建工具、编译工具链、CPU架构”一、完整的嵌入式Linux环境一个嵌入式Linux系统通常包括以下关键组件(以Jetson、树莓派等ARM版SBC为例):交叉编译工具链(crosstoolchain):生成目标CPU可执行代码,如aarch64-linux-gnu-gcc+glibc/musl/uClibc。Bootloader:如U
- 树莓派ubuntu安装jdk17
编程大玩家
java编程开发后端开发linux运维服务器树莓派jdk
jdk17已经成为主流,我自己日常使用都是基于java17,打算在树莓派搭建一个tomcat,所以先来安装一下jdk环境。我的设备是树莓派3B+,安装的系统镜像是:ubuntu-22.04.1-preinstalled-server-arm64+raspi.img接下来开始安装JDK,咱们只说重点,喜欢的朋友给点点赞。1.添加软件仓库,更新仓库数据sudoadd-apt-repositoryppa
- 从小白到进阶:解锁linux与c语言高级编程知识点嵌入式开发的任督二脉(1)
small_wh1te_coder
嵌入式linuxc嵌入式硬件算法c汇编面试linux
【硬核揭秘】Linux与C高级编程:从入门到精通,你的全栈之路!第一部分:初识Linux与环境搭建,玩转软件包管理——嵌入式开发的第一道“坎”嘿,各位C语言的“卷王”们!你可能已经习惯了在Windows或macOS上敲代码,用IDE点点鼠标就能编译运行。但当你踏入嵌入式开发的大门,尤其是涉及到那些跑着Linux系统的“大家伙”(比如树莓派、工控机、智能路由器),你就会发现,一个全新的世界在你面前展
- 树莓派用c语言pwm控制电机,树莓派学习笔记之PWM控制直流电机转速
简单的艾伦
树莓派用c语言pwm控制电机
树莓派控制PWM控制电机转速一、硬件树莓派12V直流电机L298N电机驱动器220V转12V变压器二、连线树莓派与L298N需要共地L298N驱动模块树莓派接线三、树莓派python库配置安装GPIO库sudoapt-getinstallpython3-rpi.gpio电机控制程序importtimeimportRPi.GPIOasGPIO#定义树莓派BCM编码引脚Motor_A_EN=16Mot
- 树莓派4B控制步进电机(电机28BYJ4+驱动板ULN2003)
由于比赛要用到就捣鼓了一下,花了一些时间走了一些弯路,记录一下。使用材料:树莓派4B、电机28BYJ4、驱动板ULN2003、杜邦线若干电机和驱动板的淘宝链接:https://m.tb.cn/h.fmtAmLW?tk=nZVJ2VDNXfWhttps://m.tb.cn/h.fmtAmLW?tk=nZVJ2VDNXfW我使用的是树莓派口是GPIO.21-24,对应的BCM编码是5,6,13,19引
- 树莓派驱动步进电机
easyboot
树莓派树莓派
闲了无聊,想用树莓派驱动步进电机。测试了两天终于OK了下图是DM422C接步进电机和树莓派GPIO步进电机红绿一组,黄蓝一组控制器接的是网线橘色,绿色,蓝色分别对应杜邦线灰色,蓝色,紫色下图是接树莓派控制器接线树莓派OPTO-橘色--25VPUL--蓝色--38GPIODIR--绿色--35GPIO接线OK后开始在树莓派中编程importRPi.GPIOasGPIOimporttime#IN1=4
- 树莓派5-编写python、实现io口点灯
利用树莓派5点亮小灯我们可以用gpiozero库一、安装gpiozero库sudoaptupdatesudoaptinstallpython3-gpiozeropinoutgpiozero库文档:gpiozero—gpiozero2.0.1Documentation复现第一个例子,实现灯闪烁。二、保存代码在树莓派的led.py文件中fromgpi
- 树莓派上 基于Opencv 实现人脸检测与人脸识别
土拨鼠不是老鼠
C++opencv人工智能计算机视觉
一,需求基于树莓派4b,usb1080p摄像头,实现人脸检测与人脸识别。尝试了海陵科的模组和百度的sdk。海陵科的模组无法录入人脸,浪费了100多块钱。百度的sdk在树莓派上也无法录入人脸,官方解决不了。最后只能用opencv自己实现,因为只要实现最简单检测和识别就行,不在乎准确率。经测试opencv能满足基本要求,这里整理下思路。二,(1),加载模型并实例化Ptr和Ptr对象。树莓派4bopen
- 树莓派实验——人脸识别
Rounie
opencvpython计算机视觉
importnumpyasnp#导入numpy科学计算库importcv2#导入OpenCV函数库#装载人脸识别特征文件face_cascade=cv2.CascadeClassifier('/usr/local/lib/python3.5/dist-packages/cv2/data/haarcascade_frontalface_alt.xml')cap=cv2.VideoCapture(0)
- 树莓派与stm32通信
stm32设置好波特率,我在32上设置的是9600对应树莓派也是9600第一步先连线,Tx和Rx的连线交叉保证通讯桥搭接,gnd相连。这里树莓派的引脚定义表可以在树莓派用pinout的命令查看可以看到树莓派的引脚,但还是不知道Tx,Rx应该是哪个引脚,这时候可以找点质料了,下面帮你找好:可以看到在8号引脚和10号引脚,对应的是GPIO14和15在32上我们要配置好serial通讯,这个代码可以看江
- 树莓派安装miniconda3(全部转载)
qq_39717490
深度学习
1、解决sudogedit找不到Debian/Ubuntu系统命令终端提示sudo:gedit:找不到命令解决方法_sudo:gedit:找不到命令-CSDN博客文章浏览阅读6.9w次,点赞57次,收藏100次。原因gedit文件损坏导致。解决方法重新安装gedit即可,打开终端(Ctrl+Alt+T),输入sudoapt-getinstallgedit注意:输入上面命令无法安装时,可以先卸载ge
- PART 7 视频
qq_39717490
音视频opencv人工智能
在Debian10上安装OpenCV的两种方法:从存储库和源代码中安装OpenCV_debianopencv-CSDN博客本人的树莓派系统是pi@pi:~$lsb_release-aNoLSBmodulesareavailable.DistributorID:DebianDescription:DebianGNU/Linux12(bookworm)Release:12Codename:bookwo
- 服务器、树莓派/香橙派部署HomeAssistant与小爱音箱联动
不对法
物联网物联网
HomeAssistant功能介绍与多平台部署实战:CentOS服务器、树莓派、香橙派部署及小爱音箱联动控制一、HomeAssistant简介HomeAssistant是一款基于Python开发的开源智能家居自动化平台,它最大的特点是高度集成和自定义。通过HomeAssistant,用户可以将不同品牌、不同协议的智能家居设备(如空调、电灯、传感器等)整合到一个统一的平台进行管理和控制,同时还支持通
- 树莓派(Raspberry Pi)常见的各种引脚介绍
qq_39717490
单片机嵌入式硬件
树莓派(RaspberryPi)常见的各种引脚介绍_树莓派引脚-CSDN博客以下为全部文章内容的复制本文将为您详细讲解树莓派(RaspberryPi)常见的各种引脚,以及它们的特点、区别和优势。树莓派是一款非常受欢迎的单板计算机,它拥有多个GPIO(通用输入输出)引脚,这些引脚可以用于各种电子项目和交互式应用。1.树莓派引脚概述树莓派有多种型号,包括RaspberryPi1、2、3和4。每种型号都
- ubuntu系统的树莓派人脸识别视频(转载哔哩哔哩)
qq_39717490
ubuntu音视频linux
树莓派进阶玩法|人脸识别项目教程_哔哩哔哩_bilibilihttps://www.bilibili.com/video/BV1uv4y1g7aB?spm_id_from=333.337.search-card.all.click&vd_source=f9b5cbd9734c647ef133bdde5c02cfd4,视频播放量34013、弹幕量29、点赞数690、投硬币枚数247、收藏人数1968
- 树莓派中 Python+opencv打开摄像头
68lizi
光电设计python
树莓派中Python+opencv打开摄像头注意不要使用cap=cv2.VideoCapture(0,cv2.CAP_DSHOW),我在树莓派使用这个的时候会报错,在windows不会报错,具体原因不清楚cap=cv2.VideoCapture(0)#使用cap=cv2.VideoCapture(0,cv2.CAP_DSHOW)会报错whileTrue:status,img=cap.read()i
- 7、使用Sonic Pi进行音乐编程
轩辕姐姐
树莓派冒险:从零开始的编程之旅SonicPi音乐编程树莓派
使用SonicPi进行音乐编程1.引言树莓派不仅仅是一个小型计算机或游戏机,它还可以成为一个强大的音乐合成器。通过使用SonicPi这款应用程序,我们可以将计算思维与音乐创作结合起来,创造出独一无二的音乐作品。本文将详细介绍如何使用SonicPi进行音乐编程,帮助你将树莓派变成一个多功能的音乐创作平台。2.SonicPi简介SonicPi是一款专门为树莓派设计的音乐编程应用程序,由音乐现场编码员S
- 9、构建树莓派点唱机:一个大冒险项目
轩辕姐姐
树莓派冒险:从零开始的编程之旅树莓派点唱机Python
构建树莓派点唱机:一个大冒险项目1.树莓派的独特之处树莓派不仅仅是一块小巧的计算机板,它拥有无限的潜力,可以被转变为各种专用设备。在这个项目中,我们将利用树莓派的强大功能,将其变成一个功能齐全的点唱机。这款点唱机将配备按钮来选择和播放曲目,并通过一个LCD屏幕显示歌曲名称,为用户提供直观的操作体验。2.项目概述这个项目比之前的项目稍微复杂一些,但它非常适合将我们在之前冒险中学到的技能综合运用起来。
- 树莓派5 安装Mysql (Docker + mariadb)方案
cocosum
Dockermysql数据库dockerlinuxmariadb
笔记:2025年6月19日22:53:16树莓派系统里面有自带的mariadb,但是我没用,我使用的docker#创建持久化数据文件夹和配置文件:/data/mysql数据/data/mysql/conf.d配置mkdir-p/data/mysql/conf.dvim/data/mysql/conf.d/remote.cnf#配置添加:[mysqld]bind-address=0.0.0.0doc
- 物联网开发笔记(6)- 使用Wokwi仿真树莓派Pico实现按键操作
魔都飘雪
物联网开发单片机嵌入式硬件
这篇文章和大家一起来看下按键相关的操作。一、目的使用按键来控制LED不同的闪烁速度二、硬件连接方法方法一:LED连接GPIO的端口0,按键连接GPIO的端口1。按键通过一个上拉电阻接到3.3V电源上,当按键不按下时是高信号,按键按下时GPIO端口1导通,变为低信号。方法二:去电上拉电阻,使用GPIO的PULL_UP功能。三、代码分析方法一:mian.py#这个例子是实现按键操作frommachin
- linux系统的树莓派考SD卡镜像(大学经验分享)
tp-try
linux运维服务器
首先:准备一个有镜像的SD卡和一张新卡,读卡器第一步:在桌面创建一个文本文件,然后改成img文件,后缀一定要是img,我这里创建的是1.img第二步:创建好了之后插入读卡器,把新卡插入读卡器,我这里用的是这个软件,直接在浏览器搜索就能直接下载,不需要任何教程第三步:下载完成之后点开,会发现他多出来一个盘E盘,这个就是插入的读卡器的盘,点击右下角那个Format就可以直接格式化(注意别弄错了,没有镜
- 玩转树莓派(一)led、pwm、超声波、常见命令
week_泽
pythonlinux开发语言
1、树莓派常见命令sudocat/etc/passwd#查看树莓派用户、密码2、玩转树莓派2.1led,py点亮ledcdDesktop#文件路径,桌面nanoled.py#新建文件夹,后面文件名led.py源文件:#!/usr/bin/python#-*-coding:utf-8-*-importRPi.GPIOasGPIO#导入RPi.GPIO库importtime#导入time库GPIO.s
- 【树莓派5实战】控制步进电机全攻略:D36A驱动42步进 + ULN驱动28步进 + 超声波测距
m0_74751715
单片机嵌入式硬件python笔记
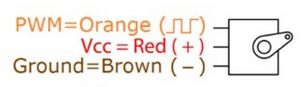
树莓派+步进电机+超声波模块=智能硬件项目的黄金搭配!本篇文章带你完整掌握如何用RaspberryPi5控制两种常见步进电机,同时集成超声波模块实现测距系列文章目录【树莓派5】实现电机PID闭环调速&舵机控制(代码封装+详细代码+调试文章目录系列文章目录前言一、步进电机原理简析✳️特点二、硬件准备三、控制42步进电机(D36A驱动+PWM控制)✅接线说明✅控制代码(gpiozero)四、控制28B
- Linux驱动程序(PWM接口)与超声波测距
Yu_
linux
一、利用阿里云服务器实现树莓派外网访问(SSH反向代理)1.树莓派端配置步骤1:安装SSH服务(若未安装)sudoapt-getinstallopenssh-server步骤2:创建反向代理连接-p22:指定阿里云服务器的SSH端口-qngfN:静默模式、后台运行、不分配伪终端-R:反向代理参数2222:阿里云服务器用于映射的端口(需自行定义未被占用的端口)username:阿里云服务器登录用户名
- Linux树莓派项目实战:外网访问、PWM呼吸灯、超声波测距与驱动开发
爱喝西北风的东北风
linux驱动开发运维
1.通过SSH反向代理实现树莓派外网访问1.1原理说明SSH反向代理通过在树莓派上建立到云服务器的隧道连接,使外网用户可以通过访问云服务器的特定端口连接到内网的树莓派。1.2实现步骤1.2.1树莓派端配置ssh-p22-qngfNTR[云服务器端口号]:localhost:22阿里云用户名@114.55.126.125参数说明:-p22:连接云服务器的SSH端口-q:安静模式(不显示警告信息)-N
- 树莓派实验
ZaaaaacK
单片机stm32嵌入式硬件
一、在树莓派上完成驱动程序控制的PWMLED灯。1.PWM概述PWM(PulseWidthModulation,脉宽调制)是一种通过调节信号脉冲宽度来模拟不同幅度模拟信号的技术。它通过周期性地改变信号的占空比(即在一个信号周期内,高电平持续时间的比例)来控制输出强度,从而实现对设备如LED亮度、电机转速等的精确控制。PWM的核心在于其输出频率和占空比的可调节性,使得数字设备能够模拟模拟信号的效果。
- c/c++的openCV 库分析图像以识别障碍物
whoarethenext
c语言c++opencv避障智能小车
项目目标搭建一台能够利用摄像头实时捕捉前方画面,通过OpenCV库分析图像以识别障碍物,并自动控制电机转向以躲避障碍的智能小车。第一部分:硬件选型要实现这个项目,你需要一个能够运行C++和OpenCV的“大脑”,以及配套的机械和电子元件。核心控制器(大脑):强烈推荐:RaspberryPi4B(树莓派)。它是一个功能完整的微型电脑,运行Linux系统,可以轻松安装和运行C++/OpenCV,并有丰
- 关于旗正规则引擎下载页面需要弹窗保存到本地目录的问题
何必如此
jsp超链接文件下载窗口
生成下载页面是需要选择“录入提交页面”,生成之后默认的下载页面<a>标签超链接为:<a href="<%=root_stimage%>stimage/image.jsp?filename=<%=strfile234%>&attachname=<%=java.net.URLEncoder.encode(file234filesourc
- 【Spark九十八】Standalone Cluster Mode下的资源调度源代码分析
bit1129
cluster
在分析源代码之前,首先对Standalone Cluster Mode的资源调度有一个基本的认识:
首先,运行一个Application需要Driver进程和一组Executor进程。在Standalone Cluster Mode下,Driver和Executor都是在Master的监护下给Worker发消息创建(Driver进程和Executor进程都需要分配内存和CPU,这就需要Maste
- linux上独立安装部署spark
daizj
linux安装spark1.4部署
下面讲一下linux上安装spark,以 Standalone Mode 安装
1)首先安装JDK
下载JDK:jdk-7u79-linux-x64.tar.gz ,版本是1.7以上都行,解压 tar -zxvf jdk-7u79-linux-x64.tar.gz
然后配置 ~/.bashrc&nb
- Java 字节码之解析一
周凡杨
java字节码javap
一: Java 字节代码的组织形式
类文件 {
OxCAFEBABE ,小版本号,大版本号,常量池大小,常量池数组,访问控制标记,当前类信息,父类信息,实现的接口个数,实现的接口信息数组,域个数,域信息数组,方法个数,方法信息数组,属性个数,属性信息数组
}
&nbs
- java各种小工具代码
g21121
java
1.数组转换成List
import java.util.Arrays;
Arrays.asList(Object[] obj); 2.判断一个String型是否有值
import org.springframework.util.StringUtils;
if (StringUtils.hasText(str)) 3.判断一个List是否有值
import org.spring
- 加快FineReport报表设计的几个心得体会
老A不折腾
finereport
一、从远程服务器大批量取数进行表样设计时,最好按“列顺序”取一个“空的SQL语句”,这样可提高设计速度。否则每次设计时模板均要从远程读取数据,速度相当慢!!
二、找一个富文本编辑软件(如NOTEPAD+)编辑SQL语句,这样会很好地检查语法。有时候带参数较多检查语法复杂时,结合FineReport中生成的日志,再找一个第三方数据库访问软件(如PL/SQL)进行数据检索,可以很快定位语法错误。
- mysql linux启动与停止
墙头上一根草
如何启动/停止/重启MySQL一、启动方式1、使用 service 启动:service mysqld start2、使用 mysqld 脚本启动:/etc/inint.d/mysqld start3、使用 safe_mysqld 启动:safe_mysqld&二、停止1、使用 service 启动:service mysqld stop2、使用 mysqld 脚本启动:/etc/inin
- Spring中事务管理浅谈
aijuans
spring事务管理
Spring中事务管理浅谈
By Tony Jiang@2012-1-20 Spring中对事务的声明式管理
拿一个XML举例
[html]
view plain
copy
print
?
<?xml version="1.0" encoding="UTF-8"?>&nb
- php中隐形字符65279(utf-8的BOM头)问题
alxw4616
php中隐形字符65279(utf-8的BOM头)问题
今天遇到一个问题. php输出JSON 前端在解析时发生问题:parsererror.
调试:
1.仔细对比字符串发现字符串拼写正确.怀疑是 非打印字符的问题.
2.逐一将字符串还原为unicode编码. 发现在字符串头的位置出现了一个 65279的非打印字符.
- 调用对象是否需要传递对象(初学者一定要注意这个问题)
百合不是茶
对象的传递与调用技巧
类和对象的简单的复习,在做项目的过程中有时候不知道怎样来调用类创建的对象,简单的几个类可以看清楚,一般在项目中创建十几个类往往就不知道怎么来看
为了以后能够看清楚,现在来回顾一下类和对象的创建,对象的调用和传递(前面写过一篇)
类和对象的基础概念:
JAVA中万事万物都是类 类有字段(属性),方法,嵌套类和嵌套接
- JDK1.5 AtomicLong实例
bijian1013
javathreadjava多线程AtomicLong
JDK1.5 AtomicLong实例
类 AtomicLong
可以用原子方式更新的 long 值。有关原子变量属性的描述,请参阅 java.util.concurrent.atomic 包规范。AtomicLong 可用在应用程序中(如以原子方式增加的序列号),并且不能用于替换 Long。但是,此类确实扩展了 Number,允许那些处理基于数字类的工具和实用工具进行统一访问。
- 自定义的RPC的Java实现
bijian1013
javarpc
网上看到纯java实现的RPC,很不错。
RPC的全名Remote Process Call,即远程过程调用。使用RPC,可以像使用本地的程序一样使用远程服务器上的程序。下面是一个简单的RPC 调用实例,从中可以看到RPC如何
- 【RPC框架Hessian一】Hessian RPC Hello World
bit1129
Hello world
什么是Hessian
The Hessian binary web service protocol makes web services usable without requiring a large framework, and without learning yet another alphabet soup of protocols. Because it is a binary p
- 【Spark九十五】Spark Shell操作Spark SQL
bit1129
shell
在Spark Shell上,通过创建HiveContext可以直接进行Hive操作
1. 操作Hive中已存在的表
[hadoop@hadoop bin]$ ./spark-shell
Spark assembly has been built with Hive, including Datanucleus jars on classpath
Welcom
- F5 往header加入客户端的ip
ronin47
when HTTP_RESPONSE {if {[HTTP::is_redirect]}{ HTTP::header replace Location [string map {:port/ /} [HTTP::header value Location]]HTTP::header replace Lo
- java-61-在数组中,数字减去它右边(注意是右边)的数字得到一个数对之差. 求所有数对之差的最大值。例如在数组{2, 4, 1, 16, 7, 5,
bylijinnan
java
思路来自:
http://zhedahht.blog.163.com/blog/static/2541117420116135376632/
写了个java版的
public class GreatestLeftRightDiff {
/**
* Q61.在数组中,数字减去它右边(注意是右边)的数字得到一个数对之差。
* 求所有数对之差的最大值。例如在数组
- mongoDB 索引
开窍的石头
mongoDB索引
在这一节中我们讲讲在mongo中如何创建索引
得到当前查询的索引信息
db.user.find(_id:12).explain();
cursor: basicCoursor 指的是没有索引
&
- [硬件和系统]迎峰度夏
comsci
系统
从这几天的气温来看,今年夏天的高温天气可能会维持在一个比较长的时间内
所以,从现在开始准备渡过炎热的夏天。。。。
每间房屋要有一个落地电风扇,一个空调(空调的功率和房间的面积有密切的关系)
坐的,躺的地方要有凉垫,床上要有凉席
电脑的机箱
- 基于ThinkPHP开发的公司官网
cuiyadll
行业系统
后端基于ThinkPHP,前端基于jQuery和BootstrapCo.MZ 企业系统
轻量级企业网站管理系统
运行环境:PHP5.3+, MySQL5.0
系统预览
系统下载:http://www.tecmz.com
预览地址:http://co.tecmz.com
各种设备自适应
响应式的网站设计能够对用户产生友好度,并且对于
- Transaction and redelivery in JMS (JMS的事务和失败消息重发机制)
darrenzhu
jms事务承认MQacknowledge
JMS Message Delivery Reliability and Acknowledgement Patterns
http://wso2.com/library/articles/2013/01/jms-message-delivery-reliability-acknowledgement-patterns/
Transaction and redelivery in
- Centos添加硬盘完全教程
dcj3sjt126com
linuxcentoshardware
Linux的硬盘识别:
sda 表示第1块SCSI硬盘
hda 表示第1块IDE硬盘
scd0 表示第1个USB光驱
一般使用“fdisk -l”命
- yii2 restful web服务路由
dcj3sjt126com
PHPyii2
路由
随着资源和控制器类准备,您可以使用URL如 http://localhost/index.php?r=user/create访问资源,类似于你可以用正常的Web应用程序做法。
在实践中,你通常要用美观的URL并采取有优势的HTTP动词。 例如,请求POST /users意味着访问user/create动作。 这可以很容易地通过配置urlManager应用程序组件来完成 如下所示
- MongoDB查询(4)——游标和分页[八]
eksliang
mongodbMongoDB游标MongoDB深分页
转载请出自出处:http://eksliang.iteye.com/blog/2177567 一、游标
数据库使用游标返回find的执行结果。客户端对游标的实现通常能够对最终结果进行有效控制,从shell中定义一个游标非常简单,就是将查询结果分配给一个变量(用var声明的变量就是局部变量),便创建了一个游标,如下所示:
> var
- Activity的四种启动模式和onNewIntent()
gundumw100
android
Android中Activity启动模式详解
在Android中每个界面都是一个Activity,切换界面操作其实是多个不同Activity之间的实例化操作。在Android中Activity的启动模式决定了Activity的启动运行方式。
Android总Activity的启动模式分为四种:
Activity启动模式设置:
<acti
- 攻城狮送女友的CSS3生日蛋糕
ini
htmlWebhtml5csscss3
在线预览:http://keleyi.com/keleyi/phtml/html5/29.htm
代码如下:
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<title>攻城狮送女友的CSS3生日蛋糕-柯乐义<
- 读源码学Servlet(1)GenericServlet 源码分析
jzinfo
tomcatWebservlet网络应用网络协议
Servlet API的核心就是javax.servlet.Servlet接口,所有的Servlet 类(抽象的或者自己写的)都必须实现这个接口。在Servlet接口中定义了5个方法,其中有3个方法是由Servlet 容器在Servlet的生命周期的不同阶段来调用的特定方法。
先看javax.servlet.servlet接口源码:
package
- JAVA进阶:VO(DTO)与PO(DAO)之间的转换
snoopy7713
javaVOHibernatepo
PO即 Persistence Object VO即 Value Object
VO和PO的主要区别在于: VO是独立的Java Object。 PO是由Hibernate纳入其实体容器(Entity Map)的对象,它代表了与数据库中某条记录对应的Hibernate实体,PO的变化在事务提交时将反应到实际数据库中。
实际上,这个VO被用作Data Transfer
- mongodb group by date 聚合查询日期 统计每天数据(信息量)
qiaolevip
每天进步一点点学习永无止境mongodb纵观千象
/* 1 */
{
"_id" : ObjectId("557ac1e2153c43c320393d9d"),
"msgType" : "text",
"sendTime" : ISODate("2015-06-12T11:26:26.000Z")
- java之18天 常用的类(一)
Luob.
MathDateSystemRuntimeRundom
System类
import java.util.Properties;
/**
* System:
* out:标准输出,默认是控制台
* in:标准输入,默认是键盘
*
* 描述系统的一些信息
* 获取系统的属性信息:Properties getProperties();
*
*
*
*/
public class Sy
- maven
wuai
maven
1、安装maven:解压缩、添加M2_HOME、添加环境变量path
2、创建maven_home文件夹,创建项目mvn_ch01,在其下面建立src、pom.xml,在src下面简历main、test、main下面建立java文件夹
3、编写类,在java文件夹下面依照类的包逐层创建文件夹,将此类放入最后一级文件夹
4、进入mvn_ch01
4.1、mvn compile ,执行后会在