ST公司 Lis2dh12 三轴加速度传感器,计算加速度值转成角度值
概述
项目上使用了一款Lis2dh12三轴加速度传感器。开发前要准备的工作。
1)要引用官方提供SDK中的lis2dh12_reg.h文件、lis2dh12_reg.c文件,才行。
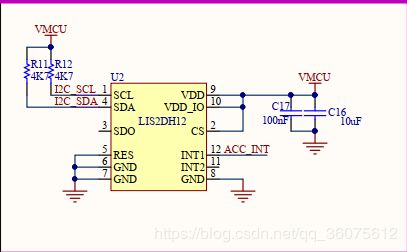
2)我使用的主控芯片是STM32L051C8T6,硬件IIC与lis2dh12通讯。
3)本次写的是Demo项目,使用工具STM32Cube IDE开发
1、原理图:

1.1、创建lis2dh12.c文件
#include "lis2dh12.h"
#include "lis2dh12_reg.h"
#include "i2c.h"
#include "stdlib.h"
#include "stdio.h"
#include
#include
#define LIS2DH12_FROM_FS_2g_HR_TO_mg(lsb) (float)((int16_t)lsb>>4) * 1.0f
#define LIS2DH12_FROM_FS_4g_HR_TO_mg(lsb) (float)((int16_t)lsb>>4) * 2.0f
#define LIS2DH12_FROM_FS_8g_HR_TO_mg(lsb) (float)((int16_t)lsb>>4) * 4.0f
#define LIS2DH12_FROM_FS_16g_HR_TO_mg(lsb) (float)((int16_t)lsb>>4) * 12.0f
#define LIS2DH12_FROM_LSB_TO_degC_HR(lsb) (float)((int16_t)lsb>>6) / 4.0f+25.0f
axis_info_t acc_sample;
filter_avg_t acc_data;
/* ============================================================
func name : lis2_Delay_us
discription : lis2 微妙延时
param : us
return :
Revision :
=============================================================== */
void lis2_Delay_us(uint32_t us)
{
int n = 11;
while(--us)
{
while(--n);
n = 11;
}
}
/* ============================================================
func name : lis2_Delay_ms
discription : lis2 毫秒延时
param : ms
return :
Revision :
=============================================================== */
void lis2_Delay_ms(uint32_t ms)
{
int i = 0;
for(;i0x19 */
// lis2dh12_iic_write_byte(0x33, 0x03); /* INT1_DURATION(33h): 1LSB=1/ODR 如果ODR=50HZ 那么1LSB=20ms 设置延时 1s,对应50->0x32 */
lis2dh12_iic_write_byte(0x33, 0x03); /* INT1_DURATION(33h): 1LSB=1/ODR 如果ODR=100HZ 那么1LSB=10ms 设置延时 1s,对应100->0x64 */
// /* INT2 单击中断 */
//// lis2dh12_iic_write_byte(0x24, 0x01); /* CTRL_REG5(24h): */
// lis2dh12_iic_write_byte(0x25, 0xa0); /* CTRL_REG6(25h): Click interrupt on INT2 pin */
//
// lis2dh12_iic_write_byte(0x38, 0x15); /* CLICK_CFG (38h): 单击识别中断使能 */
//// lis2dh12_iic_write_byte(0x39, 0x10);
// lis2dh12_iic_write_byte(0x3a, 0x7f); /* CLICK_THS (3Ah): 单击阀值 */
// lis2dh12_iic_write_byte(0x3b, 0xff); /* TIME_LIMIT (3Bh): 时间限制窗口6 ODR 1LSB=1/ODR 1LSB=1/100HZ,10ms,设置延时1s,对应100—>0x64*/
// lis2dh12_iic_write_byte(0x3c, 0xff); /* TIME_LATENCY (3Ch): 中断电平持续时间1 ODR=10ms */
// lis2dh12_iic_write_byte(0x3d, 0x01); /* TIME_WINDOW (3Dh): 单击时间窗口 */
/* Start sensor */
// lis2dh12_iic_write_byte(0x20, 0x37);
lis2dh12_iic_write_byte(0x20, 0x5f); /* CTRL_REG1(20h): Start sensor at ODR 100Hz Low-power mode */
return 0;
}
/* ============================================================
func name : get_acc_value
discription : 获取加速度值
param : axis_info_t *sample
return : void
Revision :
=============================================================== */
void get_acc_value(axis_info_t *sample)
{
uint8_t i = 0;
uint8_t data[6];
for (i=0; i<6; i++){
lis2dh12_iic_read_byte(0x28+i, data+i); //获取X、y、z轴的数据
//printf("data[i] %d, \r\n", data[i]);
}
// sample->x = abs((int)(LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)data)));
// sample->y = abs((int)(LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)(data+2))));
// sample->z = abs((int)(LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)(data+4))));
sample->x = LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)data);
sample->y = LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)(data+2));
sample->z = LIS2DH12_FROM_FS_2g_HR_TO_mg(*(int16_t*)(data+4));
}
/* ============================================================
func name : filter_calculate
discription : 均值滤波器---滤波
读取xyz数据存入均值滤波器,存满进行计算,滤波后样本存入sample
param : filter_avg_t *filter, axis_info_t *sample
return : void
Revision :
=============================================================== */
void filter_calculate(filter_avg_t *filter, axis_info_t *sample)
{
uint8_t i = 0;
short x_sum = 0, y_sum = 0, z_sum = 0;
for (i=0; iinfo[i].x = sample->x;
filter->info[i].y = sample->y;
filter->info[i].z = sample->z;
x_sum += filter->info[i].x;
y_sum += filter->info[i].y;
z_sum += filter->info[i].z;
printf("acc_x:%d, acc_y:%d, acc_z:%d \n",filter->info[i].x,filter->info[i].y,filter->info[i].z);
}
sample->x = x_sum / FILTER_CNT;
sample->y = y_sum / FILTER_CNT;
sample->z = z_sum / FILTER_CNT;
printf("\r\n acc_info.acc_x:%d, acc_info.acc_y:%d, acc_info.acc_z:%d \r\n",sample->x, sample->y, sample->z);
}
/* ============================================================
func name : new_angle_calculate
discription : 计算新角度
param : axis_info_t *sample
return : void
Revision :
=============================================================== */
void new_angle_calculate(axis_info_t *sample)
{
sample->new_angle_x = atan((short)sample->x/(short)sqrt(pow(sample->y, 2)+pow(sample->z, 2))) * DEGREE_CAL;
sample->new_angle_y = atan((short)sample->y/(short)sqrt(pow(sample->x, 2)+pow(sample->z, 2))) * DEGREE_CAL;
sample->new_angle_z = atan((short)sample->z/(short)sqrt(pow(sample->x, 2)+pow(sample->y, 2))) * DEGREE_CAL;
if (sample->new_angle_z < 0)
{
sample->new_angle_x = 180-sample->new_angle_x;
sample->new_angle_y = 180-sample->new_angle_y;
}
printf("sample->new_angle_x:%d, sample->new_angle_y:%d, sample->new_angle_z:%d \r\n",sample->new_angle_x, sample->new_angle_y, sample->new_angle_z);
}
/* ============================================================
func name : old_angle_calculate
discription : 计算旧角度
param : axis_info_t *sample
return : void
Revision :
=============================================================== */
void old_angle_calculate(axis_info_t *sample)
{
sample->old_angle_x = atan((short)sample->x/(short)sqrt(pow(sample->y, 2)+pow(sample->z, 2))) * DEGREE_CAL;
sample->old_angle_y = atan((short)sample->y/(short)sqrt(pow(sample->x, 2)+pow(sample->z, 2))) * DEGREE_CAL;
sample->old_angle_z = atan((short)sample->z/(short)sqrt(pow(sample->x, 2)+pow(sample->y, 2))) * DEGREE_CAL;
if (sample->old_angle_z < 0)
{
sample->old_angle_x = 180-sample->old_angle_x;
sample->old_angle_y = 180-sample->old_angle_y;
}
printf("sample->old_angle_x:%d, sample->old_angle_y:%d, sample->old_angle_z:%d \r\n",sample->old_angle_x, sample->old_angle_y, sample->old_angle_z);
}
1.2、在此重点说明,如果想调传感器的中断灵敏度,注意:关注1、INT1_THS(32h),2、INT1_DURATION(33h)这两个寄存器即可。
INT1_THS(32h)
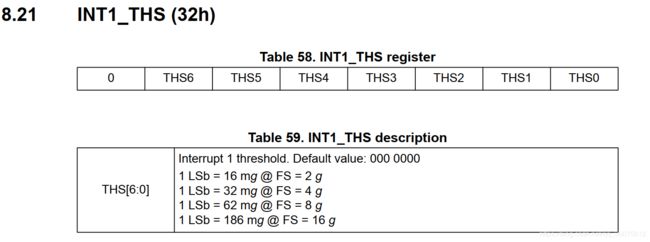
1.3、计算阀值:主要是看配置中断的量程是哪个。
(1)如果量程 FS=2g 每1LSB=16mg
那么寄存器配置INT1_THS=2 那么阈值=2*16mg
如果INT1_THS=5 那么阈值=5*16mg
(2)如果量程FS=4g,那么每1LSB=32mg
INT1_THS =5 阈值就是5*32mg=160mg
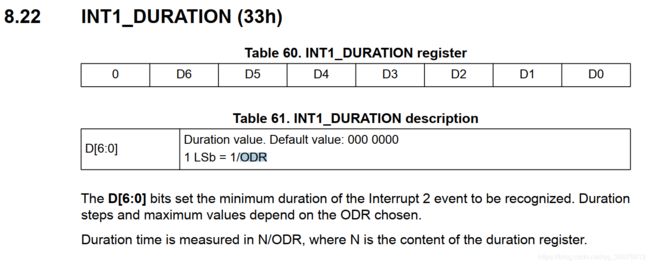
看配置的ODR是哪个,来计算延时的时间。
1LSB=1/ODR 如果ODR=50HZ 那么1LSB=20ms
/*
500mg = 30°
250mg = 15°
160mg = 10°
我现在对应的量程是FS=2g,INT1_THS=10,那么阀值=10*16mg
1LSB=1/ODR 如果ODR=50HZ 那么1LSB=20ms
50LSB = 1s
100LSB = 2s
*/1.4、创建lis2dh12.h文件
#ifndef __LIS2DH12_H
#define __LIS2DH12_H
#ifdef __cplusplus
extern "C"
{
#endif
#include "stdint.h"
#define DEGREE_CAL 180.0/3.1416
#define FILTER_CNT 4
typedef struct {
short x;
short y;
short z;
short new_angle_x;
short new_angle_y;
short new_angle_z;
short old_angle_x;
short old_angle_y;
short old_angle_z;
}axis_info_t;
typedef struct filter_avg{
axis_info_t info[FILTER_CNT];
unsigned char count;
}filter_avg_t;
extern axis_info_t acc_sample;
extern filter_avg_t acc_data;
void filter_calculate(filter_avg_t *filter, axis_info_t *sample);
void old_angle_calculate(axis_info_t *sample);
void new_angle_calculate(axis_info_t *sample);
#endif
1.5、main.c文件
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "lis2dh12.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
filter_calculate(&acc_data, &acc_sample);
old_angle_calculate(&acc_sample);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
HAL_Delay(1000);
filter_calculate(&acc_data, &acc_sample);
new_angle_calculate(&acc_sample);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
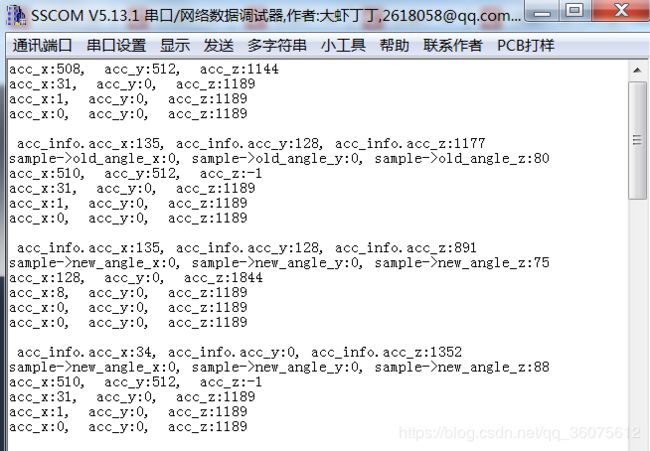
}1.6、demo运行结果如下:
代码:Git