03-0002 Python实现A*算法
Python实现A*算法
- 1.算法描述
- 2.问题描述
- 3.算法原理
- 4.算法源码
- 5.算法输出
- 6.总结
1.算法描述
A*搜寻算法俗称A星算法,是比较流行的启发式搜索算法之一,被广泛应用于路径优化领域。它的独特之处是检查最短路径中每个可能的节点时引入了全局信息,对当前节点距终点的距离做出估计,并作为评价该节点处于最短路线上的可能性的量度。
A*改变它自己行为的能力基于启发式代价函数,启发式函数在游戏中非常有用。在速度和精确度之间取得折衷将会让你的游戏运行得更快。在很多游戏中,你并不真正需要得到最好的路径,仅需要近似的就足够了。而你需要什么则取决于游戏中发生着什么,或者运行游戏的机器有多快。
在本实验中,为了解决罗马尼亚度假问题而引入的A算法,目的是为了寻找一个城市到另一个城市的最短路径,A算法
扩展:本来想些启发式算法的,但是突然迷茫了一下,可以以后再写,好好的学一学。当我写这些东西的时候,我发现,自己还不是很懂。
以上多数文字直接来源于度娘百科,没有过多的修改。我对于A*算法的描述,着实少之又少,感觉自己又回到了最初的懵懂状态。
我需要一个比较好的数据集来解释自己想要时候的,直接用数据来描述自己想要表达的。
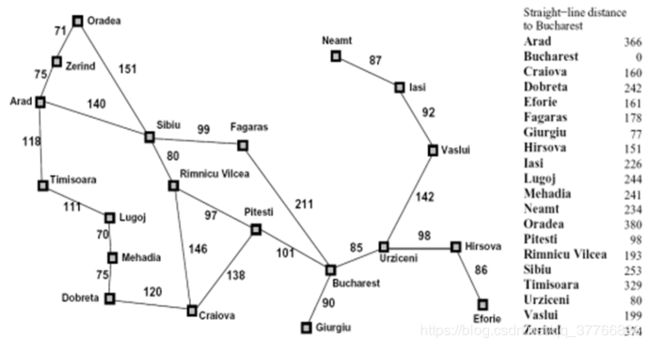
2.问题描述
旅行商问题:
In the following map with 20 cities, please find a route from Zerind to Bucharest using A search.*
[在一个拥有20个城市的图中,使用A星算法,找到一条最优路径从塞尔维亚到罗马尼亚]
解释:上述图中,线上的数字表示两个城市的实际距离。
右侧的数字表示到Bucharest[终点]的估计距离。
每个城市的首字母都不一样,可以数字化。
3.算法原理
A*算法是一种搜索算法,在算法过程中引入了F,G,H三个量。
F = G + H F=G+H F=G+HF : 用 作 判 断 条 件 的 量 。 在 算 法 使 用 的 数 据 结 构 [ 优 先 级 队 列 ] 中 , F 小 的 将 会 先 弹 出 。 F:用作判断条件的量。在算法使用的数据结构[优先级队列]中,F小的将会先弹出。 F:用作判断条件的量。在算法使用的数据结构[优先级队列]中,F小的将会先弹出。
G : 从 出 发 点 到 当 前 节 点 的 实 际 距 离 。 G:从出发点到当前节点的实际距离。 G:从出发点到当前节点的实际距离。
H : 从 当 前 节 点 到 目 标 节 点 的 估 计 距 离 。 H:从当前节点到目标节点的估计距离。 H:从当前节点到目标节点的估计距离。
下面引入具体数据,来演示A*算法:
.
说明:p S 12 : P 节 点 的 F 值 是 12 , 父 节 点 是 S p_{S}^{12}:P节点的F值是12,父节点是S pS12:P节点的F值是12,父节点是S
P Q : 优 先 级 队 列 PQ:优先级队列 PQ:优先级队列
S K : 栈 SK:栈 SK:栈注意事项:
1. 每 次 进 入 P Q 的 结 点 是 上 一 次 从 P Q 弹 出 结 点 的 临 近 结 点 。 1.每次进入PQ的结点是上一次从PQ弹出结点的临近结点。 1.每次进入PQ的结点是上一次从PQ弹出结点的临近结点。
2. 从 P Q 中 弹 出 的 结 点 放 入 S K 中 2.从PQ中弹出的结点放入SK中 2.从PQ中弹出的结点放入SK中
3. 进 入 P Q 的 结 点 若 已 经 存 在 , 比 较 F 值 , 小 的 留 下 3.进入PQ的结点若已经存在,比较F值,小的留下 3.进入PQ的结点若已经存在,比较F值,小的留下
4. 已 经 存 在 于 S K 中 的 结 点 不 进 入 P Q 中 4.已经存在于SK中的结点不进入PQ中 4.已经存在于SK中的结点不进入PQ中
5. 到 达 目 标 结 点 就 终 止 运 算 5.到达目标结点就终止运算 5.到达目标结点就终止运算过程:
P Q : S n o n e 12 PQ:S_{none}^{12} PQ:Snone12
S K : n o n e SK:none SK:none
.
P Q : S n o n e 12 , d s 12 , e s 13 , p s 12 PQ:\bcancel{S_{none}^{12}},d_{s}^{12},e_{s}^{13},p_{s}^{12} PQ:Snone12 ,ds12,es13,ps12
S K : S SK:S SK:S
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , p s 12 , b d 15 , c d 16 , e d 9 \xcancel{e_{s}^{13}},p_{s}^{12},b_{d}^{15},c_{d}^{16},e_{d}^{9} es13 ,ps12,bd15,cd16,ed9 [ 这 里 需 要 替 换 e 结 点 ] [这里需要替换e结点] [这里需要替换e结点]
S K : S , d SK:S,d SK:S,d
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , p s 12 , b d 15 , c d 16 , \xcancel{e_{s}^{13}},p_{s}^{12},b_{d}^{15},c_{d}^{16}, es13 ,ps12,bd15,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , h_{e}^{12}, he12, r e 20 r_{e}^{20} re20 [ 此 时 弹 出 p , h 皆 可 ] [此时弹出p,h皆可] [此时弹出p,h皆可]
S K : S , d , e SK:S,d,e SK:S,d,e
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , b_{d}^{15},c_{d}^{16}, bd15,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , h_{e}^{12}, he12, r e 20 r_{e}^{20} re20 , q p 25 q_{p}^{25} qp25
S K : S , d , e , p SK:S,d,e,p SK:S,d,e,p
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , b_{d}^{15},c_{d}^{16}, bd15,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 r_{e}^{20} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 q_{h}^{19} qh19 [ 此 时 p 在 S K , q 在 P Q , p 不 进 , q 换 掉 ] [此时p在SK,q在PQ,p不进,q换掉] [此时p在SK,q在PQ,p不进,q换掉]
S K : S , d , e , p , h SK:S,d,e,p,h SK:S,d,e,p,h
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , \bcancel{b_{d}^{15}},c_{d}^{16}, bd15 ,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 r_{e}^{20} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 q_{h}^{19} qh19, a b 14 a_{b}^{14} ab14
S K : S , d , e , p , h , b SK:S,d,e,p,h,b SK:S,d,e,p,h,b
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , \bcancel{b_{d}^{15}},c_{d}^{16}, bd15 ,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 r_{e}^{20} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 q_{h}^{19} qh19, a b 14 \bcancel{a_{b}^{14}} ab14 [ a 没 有 临 近 结 点 , 弹 出 下 一 个 ] [a没有临近结点,弹出下一个] [a没有临近结点,弹出下一个]
S K : S , d , e , p , h , b , a SK:S,d,e,p,h,b,a SK:S,d,e,p,h,b,a
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , \bcancel{b_{d}^{15}},c_{d}^{16}, bd15 ,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 \xcancel{r_{e}^{20}} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 \bcancel{q_{h}^{19}} qh19 , a b 14 \bcancel{a_{b}^{14}} ab14 , r q 19 r_{q}^{19} rq19
S K : S , d , e , p , h , b , a , q SK:S,d,e,p,h,b,a,q SK:S,d,e,p,h,b,a,q
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , \bcancel{b_{d}^{15}},c_{d}^{16}, bd15 ,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 \xcancel{r_{e}^{20}} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 \bcancel{q_{h}^{19}} qh19 , a b 14 \bcancel{a_{b}^{14}} ab14 , r q 19 \bcancel{r_{q}^{19}} rq19 , f r 18 f_{r}^{18} fr18
S K : S , d , e , p , h , b , a , q , r SK:S,d,e,p,h,b,a,q,r SK:S,d,e,p,h,b,a,q,r
.
P Q : S n o n e 12 , PQ:\bcancel{S_{none}^{12}}, PQ:Snone12 , d s 11 , \bcancel{d_{s}^{11}}, ds11 , e s 13 , \xcancel{e_{s}^{13}}, es13 , p s 12 \bcancel{p_{s}^{12}} ps12 , b d 15 , c d 16 , \bcancel{b_{d}^{15}},c_{d}^{16}, bd15 ,cd16, e d 9 , \bcancel{e_{d}^{9}}, ed9 , h e 12 , \bcancel{h_{e}^{12}}, he12 , r e 20 \xcancel{r_{e}^{20}} re20 , q p 25 \xcancel{q_{p}^{25}} qp25 , q h 19 \bcancel{q_{h}^{19}} qh19 , a b 14 \bcancel{a_{b}^{14}} ab14 , r q 19 \bcancel{r_{q}^{19}} rq19 , f r 24 \bcancel{f_{r}^{24}} fr24 , c f 25 c_{f}^{25} cf25, G f 23 G_{f}^{23} Gf23 [ 得 到 了 G 进 行 终 止 ] [得到了G进行终止] [得到了G进行终止]
S K : S , d , e , p , h , b , a , q , r , f SK:S,d,e,p,h,b,a,q,r,f SK:S,d,e,p,h,b,a,q,r,f
.回溯: G f 23 G_{f}^{23} Gf23, f r 24 \bcancel{f_{r}^{24}} fr24 , r q 19 \bcancel{r_{q}^{19}} rq19 , q h 19 \bcancel{q_{h}^{19}} qh19 , h e 12 \bcancel{h_{e}^{12}} he12 , e d 9 \bcancel{e_{d}^{9}} ed9 , d s 11 \bcancel{d_{s}^{11}} ds11 , S n o n e 12 \bcancel{S_{none}^{12}} Snone12
最终结果: S → d → e → h → q → r → f → G S\rightarrow d\rightarrow e\rightarrow h\rightarrow q\rightarrow r\rightarrow f\rightarrow G S→d→e→h→q→r→f→G
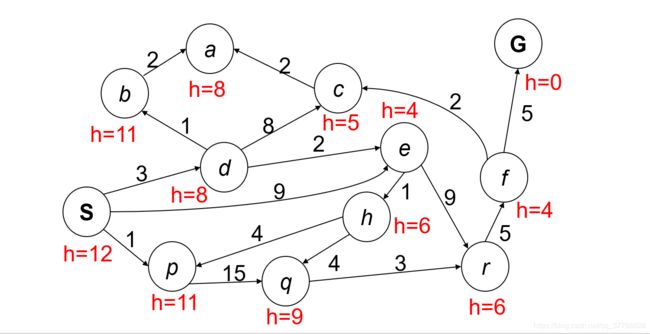
具体的实验过程中需要用某种数据结构来保存父节点,以便回溯,而且最终G结点的F值,就是实际路程。
自我感觉良好,上面的那一段我输入了好长时间。不知道是什么原因,过程特别的卡顿,我猜是因为要解析好多的符号,可能需要消耗时间,比较少的时候还好,很多的话,就不如插入一张图片。这也是浏览器加载的时候需要注意的,加载一张图远比加载好多图来得快,所以会将好多图标都绘制在一张图上,在网页中只显示图片中的某一部分,这样一来,打开这样的网页,图片就只加载了一次。
流程图如下:
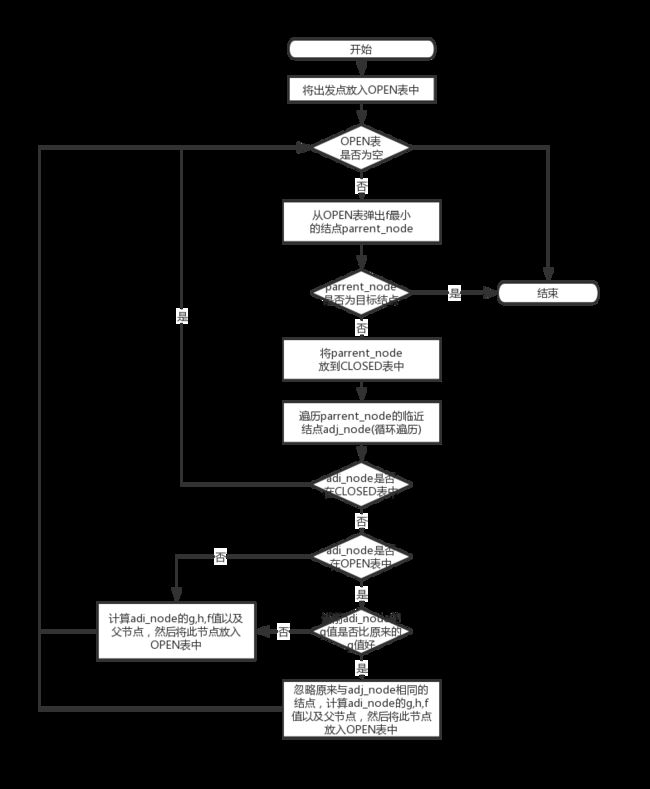
这是很久以前绘制的流程图,可能不是很准确但是是根据伪代码画出来的,应该不会有错。
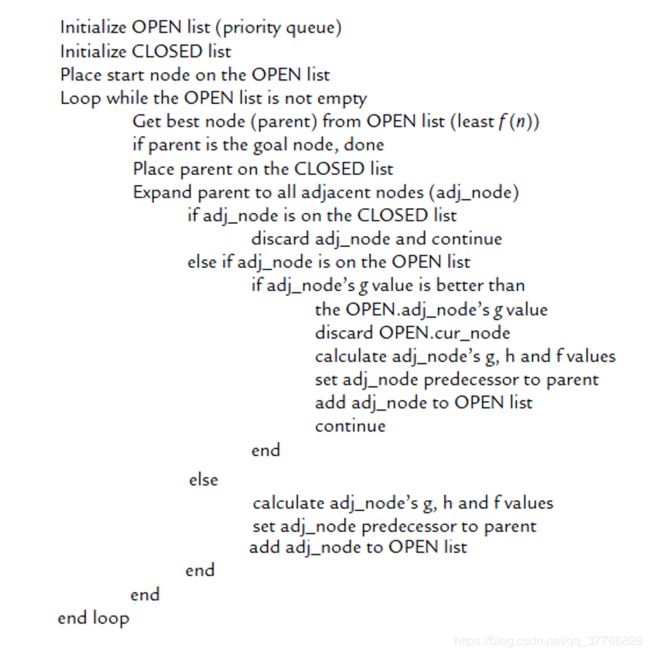
伪代码:
4.算法源码
#!/usr/bin/python
# -*- coding: UTF-8 -*-
# redefine place
A = 0 # Arad
B = 1 # Bucharest
C = 2 # Craiova
D = 3 # Dobreta
E = 4 # Eforie
F = 5 # Fagaras
G = 6 # Giurgiu
H = 7 # Hirsova
I = 8 # Iasi
L = 9 # Lugoj
M = 10 # Mehadia
N = 11 # Neamt
O = 12 # Oradea
P = 13 # Pitesti
R = 14 # Rimnicu Vilcea
S = 15 # Sibiu
T = 16 # Timisoara
U = 17 # Urziceni
V = 18 # Vaslui
Z = 19 # Zerind
# 构建一个20*20的矩阵
PLACES_NUM = 20
# 地图
class Graph:
def __init__(self):
self.romania_graph = [[0] * PLACES_NUM for i in range(PLACES_NUM)]
def add_edge(self, _from, _to, _value):
if _from < PLACES_NUM:
if _to < PLACES_NUM:
self.romania_graph[_from][_to] = _value
self.romania_graph[_to][_from] = _value
def get_edge(self, _from, _to):
return self.romania_graph[_from][_to]
#问题的最终解
class Stack:
def __init__(self):
self.stack = []
def push(self, value):
self.stack.append(value)
return
def pop(self):
return self.stack.pop()
def is_empty(self):
if self.stack:
return False
return True
# CLOSED表
class Queue:
def __init__(self):
self.queue = []
def put(self, value):
self.queue.append(value)
return
def get(self):
return self.queue.pop(0)
def contain(self, value):
return value in self.queue
def is_empty(self):
if self.queue:
return False
return True
# OPEN表
class PriorityQueue:
def __init__(self):
self.queue = []
def put(self, node_cost):
"""
:param node_cost: [value,cost]
"""
self.queue.append(node_cost)
def get(self):
if self.queue:
min_i = 0
min_cost = self.queue[min_i][1]
for i in range(len(self.queue)):
if self.queue[i][1] < min_cost:
min_i = i
min_cost = self.queue[i][1]
return self.queue.pop(min_i)
def contain(self,value):
for i in range(len(self.queue)):
if self.queue[i][0]==value:
return self.queue[i],True
return None,False
def is_empty(self):
if self.queue:
return False
return True
# initialize undirected graph
# 初始化无向图
def init_graph():
graph = Graph()
graph.add_edge(O, Z, 71)
graph.add_edge(O, S, 151)
graph.add_edge(A, Z, 75)
graph.add_edge(A, S, 140)
graph.add_edge(A, T, 118)
graph.add_edge(T, L, 111)
graph.add_edge(L, M, 70)
graph.add_edge(M, D, 75)
graph.add_edge(D, C, 120)
graph.add_edge(S, R, 80)
graph.add_edge(S, F, 99)
graph.add_edge(R, C, 146)
graph.add_edge(F, B, 211)
graph.add_edge(R, P, 97)
graph.add_edge(C, P, 138)
graph.add_edge(P, B, 101)
graph.add_edge(B, G, 90)
graph.add_edge(B, U, 85)
graph.add_edge(U, H, 98)
graph.add_edge(U, V, 142)
graph.add_edge(V, I, 92)
graph.add_edge(I, N, 87)
graph.add_edge(H, E, 86)
return graph
def a_star(graph, h, _root, _goal):
g = [0] * PLACES_NUM # g(n) value 现阶段搜索过程中的每个结点的g(n)记录@
parents = [0] * PLACES_NUM # temporary parents 现阶段搜索过程中的每个节点的父结点记录@
pq_open = PriorityQueue() # open queue 初始化open表@
q_close = Queue() # closed queue 初始化closed表@
s_path = Stack() # solution nodes path s_path中作为走过路径记录@
s_parent = Stack() # solution nodes' parents path s_parent中作为open表每次pop的记录@
pq_open.put([_root, 0]) #将初始结点存入OPEN表中@
while pq_open.is_empty()==False:
parrent_node=pq_open.get()
if parrent_node[0]==_goal:
break
q_close.put(parrent_node[0])
for i in range(20):
length=graph.get_edge(parrent_node[0],i)
if length!=0:
node,result=pq_open.contain(i)
f=parrent_node[1]-h[parrent_node[0]]+length+h[i]
if q_close.contain(i):
continue
elif result==True:
if node[1]>f:
node.pop()
parents[i]=parrent_node[0]
pq_open.put([i,f])
else:
parents[i]=parrent_node[0]
pq_open.put([i,f])
path=[]
cost=0
print("parents:",parents)
p=_goal
while p!=_root:
cost+=graph.get_edge(p,parents[p])
path.append(p);
p=parents[p]
length=len(path)-1
print('path:',_root,end='')
for i in range(length+1):
print(" -->",path[length-i],end='')
print()
return cost
if __name__ == '__main__':
graph = init_graph()
# 怎么才能够获取到这个矩阵
h = (366, 0, 160, 242, 161,
178, 77, 151, 226, 244,
241, 234, 380, 98, 193,
253, 329, 80, 199, 374)
# place_str = input()
# places = place_str.split()
# cost = a_star(graph, h, eval(places[0]), eval(places[1]))
print("node","A"," B")
cost = a_star(graph, h,eval('A'),eval('B'))
print('cost:',cost)
print()
print("node","C"," B")
cost = a_star(graph, h,eval('C'),eval('B'))
print('cost:',cost)
print()
print("node","U"," B")
cost = a_star(graph, h,eval('U'),eval('B'))
print('cost:',cost)
print()
备注:
- 保存好源码之后,自己多写几个print来看一看各个数据都是什么,避免超级低级的错误。
- 源码总注释比较少,为何?因为有了流程图,以及上面的展示,A*算法的思想还是很容易就可以理解的,而且算法部分的代码很容易就能够看懂。
话说我也不知道是为什么,我上传代码之后竟然没有高亮显示,感觉很奇怪,是不是我等级尚低,修为尚浅,还是因为之前的代码都是MATLAB代码。- 代码最后的部分,注释掉的三行是用来控制台输入的,但是鉴于Sublime Text3中input()函数不好用,我直接弄成了固定的测试数据。
- 代码中最后的cost计算,可以直接从A*算法中得到,
并不需要使用回溯的方法,所以我这里这样写,纯属画蛇添足,但是因为要输出路径,所以顺带算了一下。
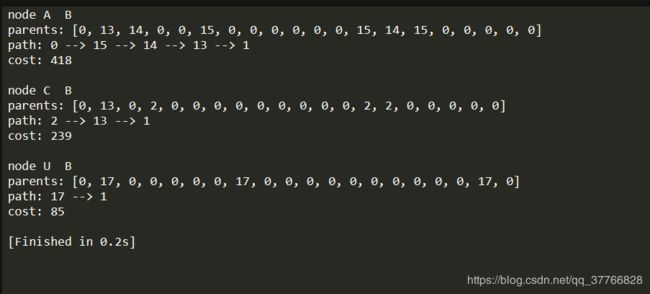
5.算法输出
6.总结
不难。但是却囿于有限的知识,而不能够将其进行扩展,A*算法是一种比较好的寻路算法,在游戏中会经常使用到,在Unity中有特定的寻路算法,也有一部分人是自己写的算法,自己写的话有什么好处呢?
倘若是自己写的寻路算法,在寻路的时候,可以给AI加上好多东西,这样可以让AI看上去不是那么傻?现在还是有一些疑惑的,寻路的时候是将地图当成了一个类似于坐标系一样的东西,中间遇到障碍物就会换路,而且是找到一条路径之后,AI才会出发,也就是说AI提前就知道一条路径,o(  ̄︶ ̄ )o。
那么怎么把现在的这种数据跟游戏中寻路数据对应起来呢?好晕。找了一些个链接,有时间的时候可以看一看,或者就最近这一段时间看一看。
链接如下:
- A星算法详解(个人认为最详细,最通俗易懂的一个版本)
- A* Pathfinding for Beginners(不用外网)
- 堪称最好最全的A*算法详解(译文)
- Amit’s A* Pages(不用外网)
应该尝试用各种编程语言写该算法,因为不能容忍自己的菜!!!